一种智能妇产科分娩助产设备
本发明涉及分娩助产设备,更具体地涉及一种智能妇产科分娩助产设备。
背景技术:
1、分娩助产设备是妇产科生产过程中常用的辅助设备之一,其中分娩助产设备主要由负压装置、输送管、负压舱、控制装置、动力提供装置以及控制系统等机构组成,且分娩助产设备进行辅助的具体流程为:操控时将负压舱放置于婴儿的头部位置,通过人工使用控制装置在动力提供装置以及控制系统的作用下控制负压装置在输送管的作用下驱动负压舱与婴儿头部形成负压环境,以便于工作人员利用负压舱进行生产辅助的作用;
2、其中负压舱主要为半圆空心状态,在使用过程中将负压舱放置于婴儿的头部,以便于负压舱与婴儿头部产生负压吸附力,以便于将其工作人员进行婴儿助产作业,当负压舱吸附于婴儿头部时主要通过人工拉动负压舱以便于进行助产作业,因此常见的分娩助产设备在使用的过程中出现以下几个问题:
3、一、无法监测婴儿头部变化数据,其问题出现的主要原因为:常见的分娩助产设备主要通过负压舱与婴儿头部所产生的负压吸附环境以便于进行婴儿拉动助产作业,而刚出生的婴儿其头部处于非塑形完成状态,且头骨为软体状,因此负压舱通过人工拉扯的过程中,其婴儿头部可能会产生较为严重的形变现象,进而导致婴儿身体受到一定损伤;
4、二、无法自动监测负压舱负压值变化,其问题出现的主要原因为:常见的分娩助产装置主要通过人工实时监测负压舱中负压值变化,因此常见的分娩助产装置在使用的过程中出现部分泄露情况时,其无法实时监测到,从而导致分娩设备助产效率受到一定影响。
技术实现思路
1、为了克服现有技术的上述缺陷,本发明提供了一种智能妇产科分娩助产设备,以解决上述背景技术中存在的问题。
2、本发明提供如下技术方案:一种智能妇产科分娩助产设备,包括主体机构,所述主体机构的一端设有升降机构,所述升降机构的一端设有负压机构,所述主体机构的内部设有监测系统;
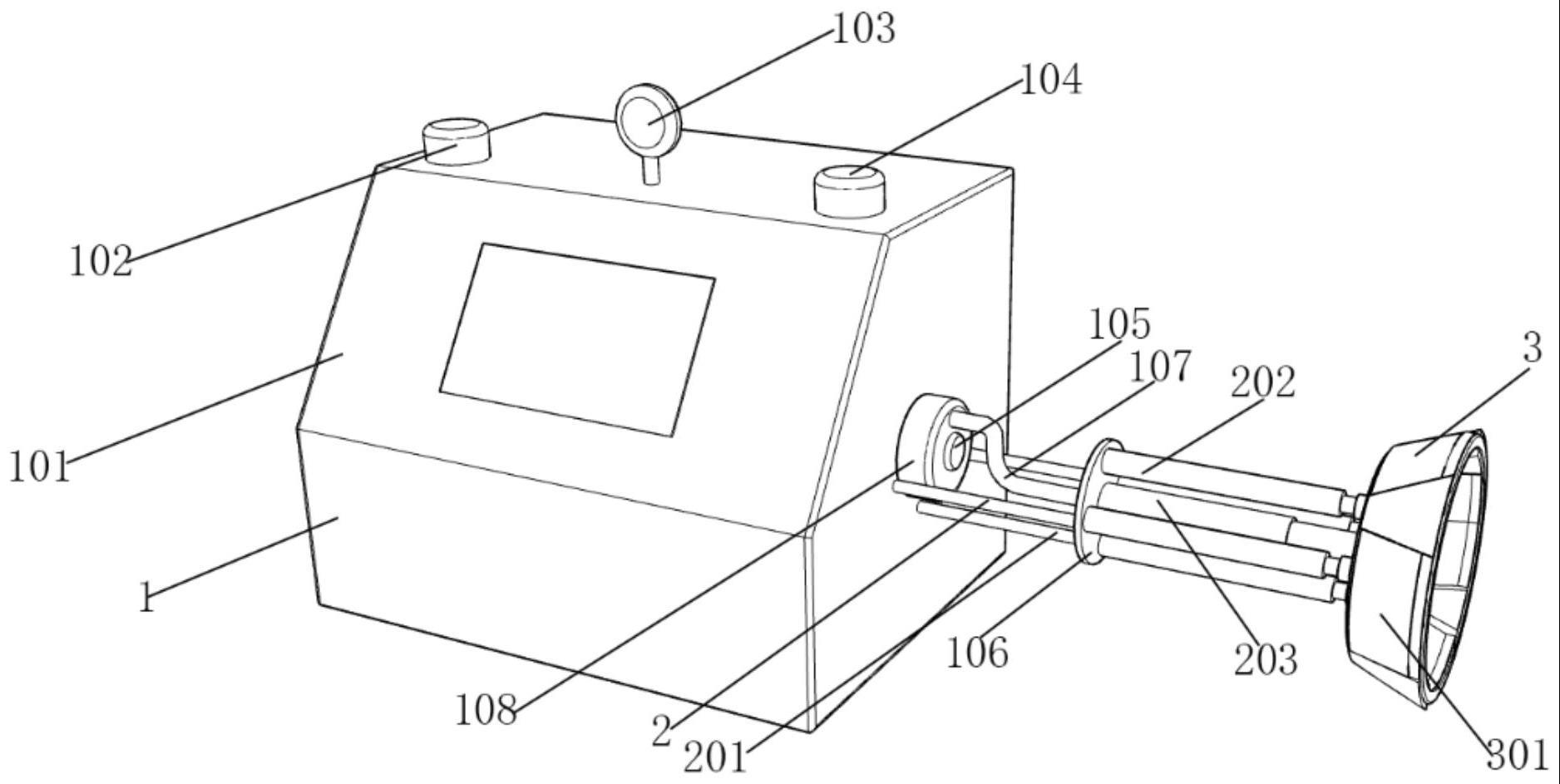
3、所述主体机构还包括控制装置,所述控制装置顶部的一侧固定连接有警报装置,所述控制装置顶端的中部固定连接有负压值检测装置,所述控制装置顶部的另一侧固定连接有控制开关,所述控制装置的一端设有第一保护舱,第一保护舱的内部内壁设有传动杆,且传动杆的外壁铺设有u型管,传动杆的一端通过设有金属转盘弹簧进行旋转作业,所述u型管一端的外壁设有固定板,所述第一保护舱的外壁固定连接有第一支撑杆;
4、所述监测系统还包括控制中心、监测单元、数据处理单元、分析单元、决策单元、预警单元以及提醒单元。
5、在一个优选的实施方式中,所述负压值检测装置实时采集负压机构内部的负压值数据u并输送至监测系统进行监测作业,监测系统控制警报装置输送电流进行工作人员提醒作业,所述警报装置为灯光装置。
6、在一个优选的实施方式中,所述升降机构还包括第二支撑杆,所述第二支撑杆的一端活动连接有固定板,所述固定板的外壁固定连接有电动升降柱,所述固定板中部的外壁固定连接有第一伸缩柱,且第一伸缩柱为多组空心柱套接组成。
7、在一个优选的实施方式中,所述电动升降柱的一端固定连接有第一挤压杆,所述第一挤压杆的外壁套接有第一空心柱,所述第一挤压杆的底部固定连接有第一挤压柱,所述第一挤压杆的底部固定连接有第一弹簧,所述第一挤压杆的外壁固定连接有第一弹簧,所述第一挤压柱的底部设有第一压力检测器,所述第一空心柱的一端固定连接有第一圆板,所述第一圆板的外壁设有第一橡胶垫。
8、在一个优选的实施方式中,所述负压机构还包括半圆体,所述半圆体的外壁套接有滑舱,所述半圆体的顶部套接有第二保护舱,所述第二保护舱的内部固定连接有第二挤压柱,所述第二挤压柱的内壁固定连接有第二弹簧,所述第二挤压柱内壁的中部固定连接有第三挤压柱,所述第三挤压柱的一端设有第二压力检测器。
9、在一个优选的实施方式中,所述第二保护舱的外壁铺设有橡胶圈,所述半圆体一侧的中部固定连接有挤压块,所述挤压块一端的中部固定连接有第二空心柱,所述第二空心柱为多组空心柱套接组成,且第二空心柱的内部设有微型弹簧,所述挤压块一侧的四边固定连接有第二伸缩柱,所述第二伸缩柱的内壁设有两组电磁铁,所述挤压块的外壁套接有圆环舱,所述圆环舱的外部设有第二圆板,所述第二圆板的中部设有智能摄像头。
10、在一个优选的实施方式中,监测单元:通过负压值检测装置实时采集负压值数据u,通过第一压力检测器实时采集第一压力数据l,通过第二压力检测器实时采集第二压力数据m;
11、数据处理单元:还包括数据接收模块以及数据传输模块,所述数据接收模块实时接收监测单元实时采集的负压值数据u、第一压力数据l以及第二压力数据m并通过数据传输模块输送至分析单元;
12、分析单元还包括阈值模块、估值模块以及对比模块,所述估值模块通过实时采集的负压值数据u、第一压力数据l以及第二压力数据m进行负压机构与婴儿头部吸附状态q值的计算,所述阈值范围模拟负压机构与婴儿头部出现吸附不彻底时所产生的qn,并整合qn形成第一阈值范围,所述阈值范围模拟负压机构与婴儿吸附是头部发生形变现象时所形成的的qm,并整合qm形成第二阈值范围,所述对比模块将q与第一阈值范围与第二阈值范围进行对比,当q处于第一阈值范围向控制中心发出第一指令,当q处于第二阈值范围向监测单元发出第二指令;
13、控制中心:接收到分析单元发出的第一指令并向决策单元发出第一决策,接收到分析单元发出的第二指令并向决策单元发出第二决策,所述控制中心还对监测单元、数据处理单元、分析单元、决策单元、预警单元以及提醒单元进行控制;
14、决策单元:接收到控制中心发出的第一决策并控制预警单元开始执行命令,接收到控制中心发出的第二决策并控制提醒单元开始执行命令;
15、预警单元:控制电动升降柱电流的输入并控制警报装置提醒工作人员出现吸附不彻底的现象;
16、提醒单元:控制电动升降柱电流的输入并控制警报装置提醒工作人员出现婴儿头部形变现象。
17、在一个优选的实施方式中,所示估值模块接收到实时采集的负压值数据u、第一压力数据l以及第二压力数据m进行归一化处理并形成负压机构与婴儿头部吸附状态q值,q值的具体计算公式为:
18、
19、本发明的技术效果和优点:
20、1.本发明通过设有主体机构以及监测系统,有利于控制控制装置通过u型管驱动半圆体内部产生负压环境,同时负压值检测装置监测负压机构内部的负压值数据u并传输至监测系统进行监测作业,当监测系统监测到负压机构出现吸附不彻底问题以及婴儿头部出现形变问题时控制警报装置发出预警提醒工作人员进行及时处理作业。
21、2.本发明通过设有负压机构以及监测系统,有利于操控时智能摄像头采集婴儿头部的三维数据并模拟出婴儿的三维模型,根据婴儿的三维模型计算出半圆体最佳直径并控制两组电磁铁之间产生磁斥力与磁吸力从而驱动挤压块带动半圆体进行相应位置的移动进而驱动半圆体达到最佳直径距离以便于对婴儿进行负压吸附作业,同时当橡胶圈接触到婴儿头部时产生的挤压力驱动第二保护舱带动第二挤压柱驱动第三挤压柱挤压到第二压力检测器从而产生第二挤压数据m并输送至监测系统进行吸附状态的实时监测作业。
- 还没有人留言评论。精彩留言会获得点赞!