运动装置和微创手术机器人的制作方法
本发明涉及医疗器械,尤其是涉及一种运动装置和微创手术机器人。
背景技术:
1、微创手术是指利用腹腔镜、胸腔镜等现代医疗器械及相关设备在人体腔体内部施行手术的一种手术方式。相比传统手术方式微创手术具有创伤小、疼痛轻、恢复快等优势。然而,微创手术中微创器械由于受到切口大小的限制,手术操作难度大为增加,这成为制约微创手术技术发展的关键因素。随着机器人技术的发展,一种可以克服缺点、继承优点的微创医疗领域新技术——微创手术机器人技术应运而生。
2、目前的微创手术机器人,刀具等手术器械通常需要精确调整位置,以便于医生在术前实现位置对准,而手术器械的精准移动需要通过运动装置来实现,然而,目前的运动装置,其各个运动模块之间的连接刚度欠缺,长时间使用后容易造成运动误差,从而影响手术器械位置调节的精度。
技术实现思路
1、本发明的目的在于提供一种运动装置和微创手术机器人,可以改善由于长时间使用后容易造成运动误差,导致手术器械位置调节的精度受到影响的缺陷。
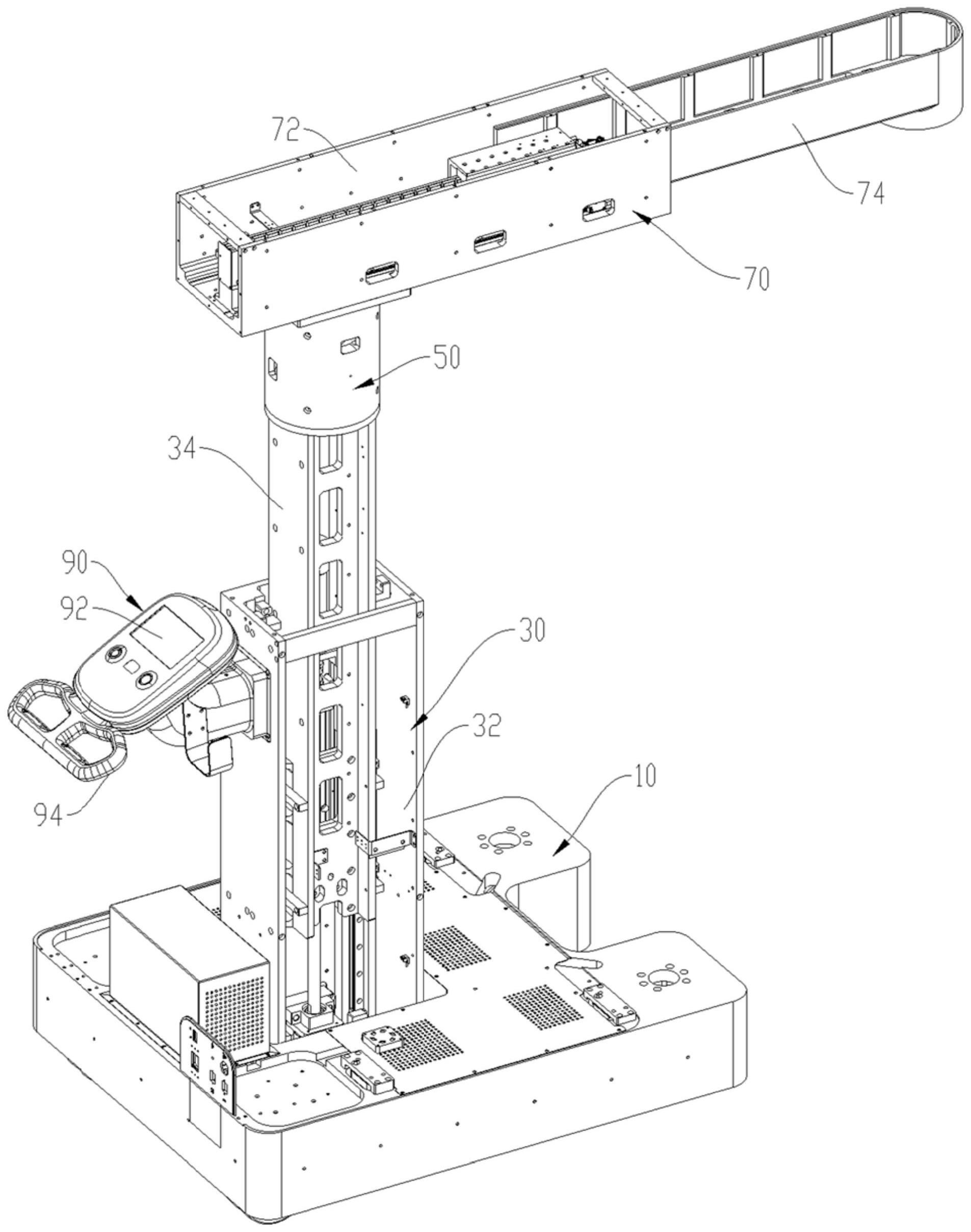
2、第一方面,本发明提供一种运动装置,用于微创手术机器人,包括:
3、基座模块;
4、升降立柱模块,设置在所述基座模块上;
5、旋转模块,设置在所述升降立柱模块上,且能够在所述升降立柱模块的作用下做升降运动;
6、水平伸缩模块,设置在所述旋转模块上,且能够在所述旋转模块的作用下做旋转运动,且转动轴线沿竖向,所述水平伸缩模块远离所述旋转模块的部位用于供手术器械设置,所述水平伸缩模块能够带动手术器械横向移动;
7、其中,所述升降立柱模块和所述基座模块之间形成第一定位配合结构,和/或,所述升降立柱模块和所述旋转模块之间形成第二定位配合结构,和/或,所述旋转模块和所述水平伸缩模块之间形成第三定位配合结构。
8、在可选的实施方式中,所述基座模块设置下凹的第一配合腔,所述升降立柱模块的底部设置有朝下凸起的第一配合部,所述第一配合部嵌入所述第一配合腔内,以共同形成所述第一定位配合结构。
9、在可选的实施方式中,所述基座模块设置有下凹的安装槽,所述第一配合腔设置在所述安装槽的槽底,所述升降立柱模块沉入所述安装槽内,且与所述安装槽的槽底固定连接。
10、在可选的实施方式中,所述升降立柱模块的顶部有朝上凸起的第二配合部,所述旋转模块的底部设置有第二配合腔,所述第二配合部嵌入所述第二配合腔,以共同形成所述第二定位配合结构;
11、和/或,
12、所述旋转模块的顶部有朝上凸起的第三配合部,所述水平伸缩模块的底部设置有第三配合腔,所述第三配合部嵌入所述第三配合腔,以共同形成所述第三定位配合结构。
13、在可选的实施方式中,所述升降立柱模块包括:
14、立柱,固定在所述基座模块上;
15、升降柱,通过第一滑动副设置于所述立柱,所述旋转模块设置在所述升降柱上;
16、升降驱动机构,设置于所述立柱,且与所述升降柱连接,用于驱动所述升降柱相对于所述立柱做升降运动。
17、在可选的实施方式中,所述升降驱动机构包括第一电机和丝杠副,所述第一电机固定于所述立柱;所述丝杠副包括丝杠和丝杠螺母,所述丝杠竖向延伸,可转动设置于所述立柱,所述丝杠螺母螺纹配合于所述丝杠,所述升降柱与所述丝杠螺母固定连接;
18、和/或,
19、所述第一滑动副包括第一滑轨和第一滑块,所述第一滑轨固定于所述立柱,且沿竖向延伸,所述第一滑块与所述第一滑轨滑动配合,所述升降柱与所述第一滑块固定连接;
20、和/或,
21、所述立柱呈中空构造,所述升降柱插设于所述立柱内,且从所述立柱的顶部伸出,所述升降驱动机构位于所述立柱内。
22、在可选的实施方式中,所述旋转模块包括:
23、外壳,固定连接在所述升降立柱模块的顶部;
24、旋转驱动机构,设置在所述外壳内;
25、安装板,位于所述外壳的顶部,并与所述旋转驱动机构连接,所述安装板能够在所述旋转驱动机构的作用下转动,且转动轴线沿竖向,所述水平伸缩模块固定在所述安装板上。
26、在可选的实施方式中,所述旋转驱动机构包括:
27、第二电机,固定于所述外壳内;
28、转轴,呈竖向延伸,可转动设置于所述外壳内,所述安装板固定连接于所述转轴,所述第二电机的电机轴与所述转轴传动连接。
29、在可选的实施方式中,所述转轴外套接有第一齿轮,所述第二电机的电机轴外套接有第二齿轮,所述第一齿轮和所述第二齿轮啮合;
30、和/或,
31、所述旋转模块还包括限位件,所述限位件设置于所述外壳内,用于限制所述转轴的转角范围;
32、和/或,
33、所述旋转模块还包括制动件,所述制动件设置于所述外壳内,所述制动件用于使所述转轴停止转动。
34、在可选的实施方式中,所述水平伸缩模块包括:
35、固定横梁,设置在所述旋转模块上;
36、伸缩横梁,通过第二滑动副设置于所述固定横梁;
37、横移驱动机构,设置于所述固定横梁,且与所述伸缩横梁连接,用于驱动所述伸缩横梁相对于所述固定横梁做水平横移运动。
38、在可选的实施方式中,所述横移驱动机构包括直线电机,所述直线电机的定子固定于所述固定横梁,所述直线电机的动子连接于所述伸缩横梁;
39、和/或,
40、所述第二滑动副包括第二滑轨和第二滑块,所述第二滑轨固定于所述固定横梁,且沿横向水平延伸,所述第二滑块与所述第二滑轨滑动配合,所述伸缩横梁与所述第二滑块固定连接;
41、和/或,
42、所述固定横梁呈中空构造,所述伸缩横梁部分位于所述固定横梁内,所述伸缩横梁位于所述固定横梁外的部位用于供手术器械设置。
43、在可选的实施方式中,所述基座模块的底部设置有可转动的万向轮和驱动轮;
44、和/或,
45、所述运动装置还包括操控模块,所述操控模块设置于所述升降立柱模块的一侧。
46、第二方面,本发明提供一种微创手术机器人,包括前述实施方式任一项所述的运动装置。
47、本发明实施例的有益效果包括:
48、通过将基座模块、升降立柱模块、旋转模块和水平伸缩模块依次设置,水平伸缩模块远离旋转模块的部位可以供手术器械设置,而由于升降立柱模块能够使旋转模块做升降运动,从而使得手术器械能够进行升降,由于旋转模块能够使水平伸缩模块做转动轴线沿竖向的旋转运动,因此可以使得手术器械随着旋转模块做圆周运动,同时水平伸缩模块能够使手术器械横向移动,这样可以使得手术器械的活动范围以及自由度更大,调节位置更为方便,调节精度更高。此外,升降立柱模块和基座模块之间形成的第一定位配合结构可以提高升降立柱模块和基座模块之间的连接刚度和装配精度,升降立柱模块和旋转模块之间形成的第二定位配合结构可以提高升降立柱模块和旋转模块之间的连接刚度和装配精度,旋转模块和水平伸缩模块之间形成的第三定位配合结构可以提高旋转模块和水平伸缩模块之间的连接刚度和装配精度,因此可以改善由于长时间使用后容易造成运动误差,导致手术器械位置调节的精度受到影响的缺陷。
- 还没有人留言评论。精彩留言会获得点赞!