基于生成对抗网络模型的散光手术预测和规划系统的制作方法
本公开属于医疗数据处理领域,特别涉及一种基于生成对抗网络模型的散光手术预测和规划系统。
背景技术:
1、散光是影响屈光性白内障术后患者裸眼视力以及视觉质量的主要因素。近年来,新开展的飞秒激光白内障手术(备注:1飞秒等于10-15秒,光速以3×108计,1飞秒时间,光在真空中传输的距离是3×10-7米,即0.3微米,即精度可达微米级),可以在白内障手术的同时,制作精准的角膜弓形切口矫正散光,这引起本领域人员的关注。
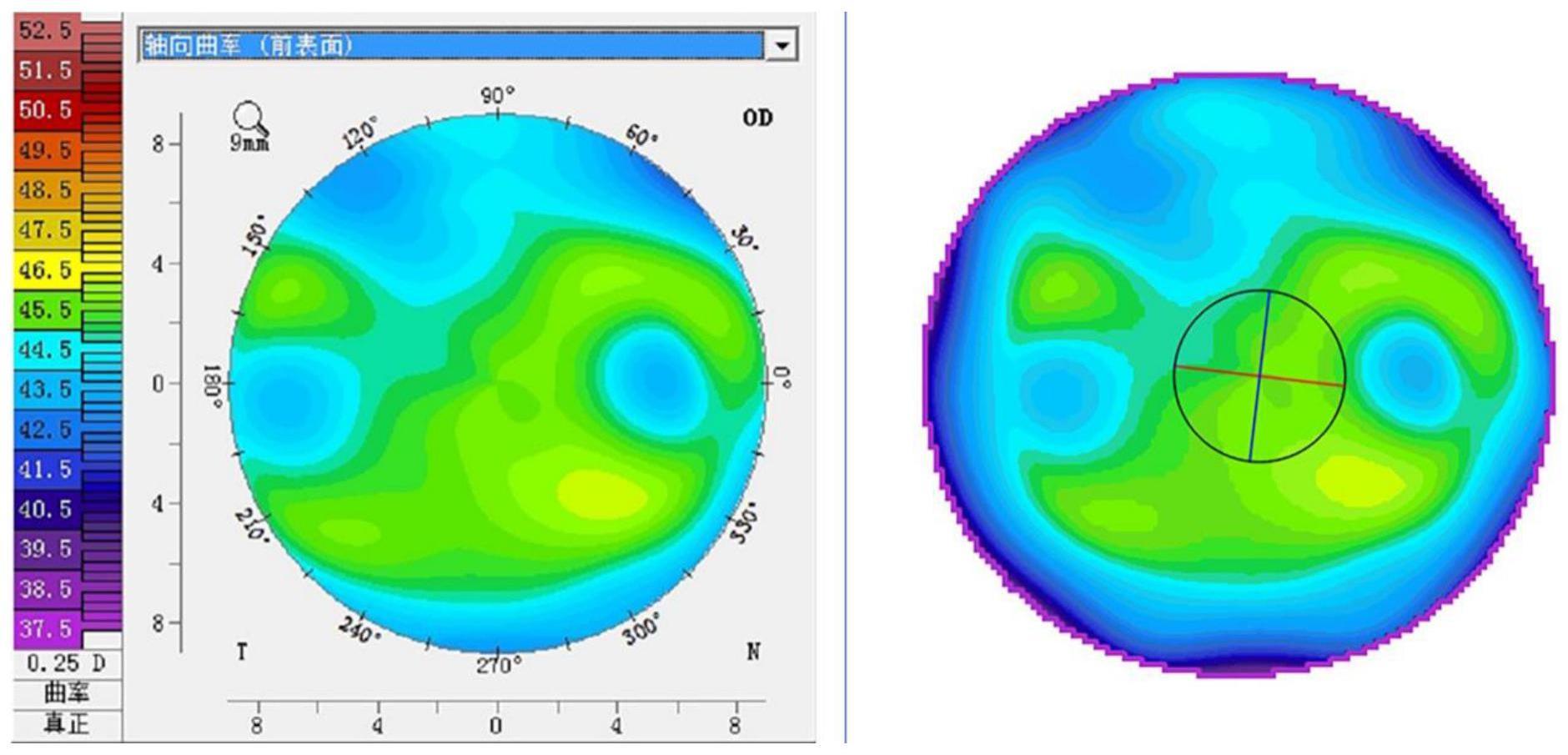
2、角膜弧形切开术,其英文全名astigmatic keratotomy,又简称为ak手术。在ak手术的实践中,往往离不开可获得角膜地形图的设备(简称角膜地形图仪,不限于各种原理获得角膜地形图的设备),这是一种通过电脑辅助,从而呈现角膜形态的新型设备,其能够较为精确地分析整个角膜表面的形态和曲率,使系统地、客观地、精确地分析角膜形态成为可能。图1所示即为一种该类设备在操作ak手术和白内障手术的联合手术时的画面,其中标注弓形切口、弓形切口轴位、白内障主切口,图2-1则示意了角膜地形图的轴向曲率图,图2-2则示意了角膜地形图的角膜厚度图。其中,轴向曲率图的色彩信息代表了角膜该部位的屈光力,暖色屈光力大,冷色屈光力小,而厚度图中:暖色代表角膜相对薄,冷色代表角膜相对厚;通过轴向曲率图的色彩分布,可以看到角膜形态是否规则,角膜屈光力什么部位最大,什么部位最小,散光的分布和“形态”;有经验的医生还能够通过角膜厚度图分析考虑术后切口水肿的部位和水肿如何变化,以及推测其如何影响散光的变化。
3、随着技术的发展,虽然角膜地形图设备能够较为准确的获得病患手术前的角膜地形图,其图像处理系统能够将角膜形态进行数码化分析,并将所获得的信息以不同特征的彩色图来表现,因其貌似地理学中地形表面高低起伏的状态,故称相应的图为角膜地形图。此类设备有望以非常高的精度来测量分析全角膜表面任意点的曲率,检测角膜屈光力。
4、虽然角膜地形图设备在不断发展,但是本领域目前亟须一种利用计算机领域的数据处理技术进行手术辅助规划的方案。
技术实现思路
1、为解决上述问题,本公开揭示了一种基于生成对抗网络模型的散光手术规划方法,包括如下步骤:
2、s100、采集数据集:
3、获取至少100例(300例更佳)患者的术前角膜地形图数据,和所述至少100例患者的术后至少1个月的(3个月更佳)角膜地形图数据,其中,
4、术前角膜地形图数据和术后1个月角膜地形图数据均为角膜地形测量设备pentacam导出的:以角膜顶点为中心,7mm为半径,以0.1mm为单位的角膜各点曲率半径从而以此获得术前和术后的原始数据;
5、s300、获得输入数据和真实目标数据:
6、基于术前角膜地形图数据和所述至少100例患者已实施的ak手术方面的信息,获得生成对抗网络模型的输入数据;
7、基于术后1个月角膜地形图数据,获得生成对抗网络模型需比较的真实目标数据;
8、s400、训练生成对抗网络模型:
9、将所述生成对抗网络模型的输入数据输入对抗生成网络的生成器,生成器则生成虚拟的目标数据;
10、所述生成对抗网络模型的判别器则比较所述虚拟的目标数据与所述真实目标数据以获得相似度;
11、并在交替固定判别器或生成器的过程中,训练生成器或判别器,直至二者达到平衡;
12、s500、以训练后的生成对抗网络模型预测并规划散光手术。
13、优选的,
14、术前和术后的原始数据以csv表的方式存储。
15、优选的,
16、步骤s300进一步包括:
17、计算3mm环内每条直径上所有点对应的屈光力的均值,并对其进行排序以找到环内屈光力均值最大的直径,该直径所对应的路径即为陡峭轴,与陡峭轴相垂直的直径所对应的路径即为平坦轴。
18、优选的,
19、步骤s100执行之后、s300执行之前,还包括如下步骤:
20、s200、对于术前的原始数据和术后的原始数据,将角膜各点曲率半径映射为角膜各点屈光力d,并对角膜各点屈光力d,按照0.25d的步长,进行相应的术前和术后角膜地形图的伪彩可视化显示,以此实现类pentacam轴向曲率图的显示;
21、并绘制术前、术后角膜中央3mm区域的平坦轴及陡峭轴,计算术前、术后各自情形下,3mm环上及环内的散光度及轴位;
22、其中,术后角膜地形图的伪彩可视化显示,和术后情形下3mm环上及环内的散光度及轴位,用于与训练过程中的生成对抗网络模型的输出进行比较,以优化所述生成对抗网络模型的训练,以及辅助规划散光手术。
23、优选的,
24、步骤s200进一步包括:
25、读取原始数据来解析角膜的曲率半径,然后通过曲率半径与屈光力的映射关系,将曲率半径转化为屈光力d。
26、优选的,
27、步骤s400包括如下步骤:
28、第一个阶段:固定生成对抗网络模型的判别器,训练生成对抗网络模型的生成器,将生成器生成的虚拟目标数据保存在缓冲池当中,如果相似度相比一阈值过小,则判别器反馈给生成器,以使得生成器得以继续训练直至相似度等于或刚刚大于所述阈值;
29、第二个阶段:固定生成器,训练判别器,使用真实目标数据和缓冲池中的虚拟目标数据训练判别器;以此往复循环,直到二者达到均衡。
30、优选的,
31、步骤s400中,损失函数如下:
32、
33、优选的,
34、步骤s400中,
35、判别器的输入为:真实术后角膜地形图或者角膜地形预测图,其中,生成对抗网络模型能够生成术后角膜地形预测图。
36、优选的,
37、步骤s400中,
38、生成器采用unet网络模型作为gan生成对抗网络模型的生成器,来提取术前角膜地形图、年龄、ak弧长的特征信息,该网络提取抽象特征的同时可利用低层特征保留更多图像细节,以增强角膜地形预测图的细腻度;
39、其中,对于患者角膜数据,在下采样阶段,通过多层卷积神经网络输出患者角膜数据的特征图(feature map);而在上采样阶段,通过转置卷积(transposed convolution)对图像进行还原以达到生成图像的目的;
40、在上采样阶段为更好的还原图像细节,采用了跳层连接将低层特征与高层特征进行拼接,高层特征保留了患者数据中的关键特征,而低层特征则保留了更多的图像细节。
41、优选的,
42、生成对抗网络模型的判别器采用全卷积网络模型,它采用多层卷积网络来实现,打破了以前生成对抗网络中判别器只生成真假标量的传统设计,可以非常容易的实现将判别器模型的输出感视野从像素逐步扩展到块和图像大小。
43、也就是说,由于本公开的创新工作,凸显了判别器模型细分为像素,块和图像三种级别,其中,对于这3种判别器:
44、像素级的判别器,用以实现输入空间到输入空间逐个像素的映射,使图像的色彩空间更加细腻,准确,但是会造成图像的几何空间信息丢失;
45、块级的判别器,用以实现输入空间一小块区域(比如70x70)到输出空间某一个值的映射,以使图像的几何空间信息非常准确,不容易丢失,同时色彩空间的也比较均匀平滑;
46、图像级判别器则是传统的判别器设计,输出为一个标量,得到的效果是最差的,而且模型参数量也比较大,不如块级判别器。
47、此外,本公开还揭示了一种基于生成对抗网络模型的散光手术规划系统,其中,
48、所述系统包括处理器、存储器;
49、所述系统用于执行前文任一所述的方法。
50、通过上述技术方案,本公开得以利用计算机数据处理技术,实现了通过术前角膜地形图对术后角膜地形图预测的方案,从而有利于利用数据处理技术来预测术后的角膜地形图以辅助ak手术规划。
- 还没有人留言评论。精彩留言会获得点赞!