自适应可重构虚拟外骨骼康复机器人系统的自适应方法
本发明涉及康复机器人,特别涉及一种自适应可重构虚拟外骨骼康复机器人系统的自适应方法。
背景技术:
1、脑卒中,俗称脑中风,是一种急性脑血管疾病,严重危害人类健康和生命安全的常见的难治性疾,其具有高发病率、高死亡率和高致残率。根据统计,我国的脑卒中发病率高于全球平均水平,每年约有250万新发脑卒中病例和750万卒中幸存者。在卒中幸存者中,70%—80%会伴有不同程度的残疾,尤以偏瘫最为常见,其极易引起上肢、下肢运动功能障碍,严重影响患者的日常生活。据临床研究表明,积极接受有效的康复治疗可使90%的患者重新获得行走和生活自理能力,若不进行康复治疗,该比例仅为6%。因此,对于脑卒中瘫痪患者进行及早的康复训练显得尤为重要,有效的康复训练可以帮助患者最大限度的改善运动功能障碍,减轻后遗症。
2、对于脑卒中患者,传统康复治疗方法主要是患者定期前往医院或者康复中心,康复治疗师针对患者进行“一对一”甚至“一对多”的手法辅助疗法,康复效果较大程度依赖医师的治疗水平,训练和训练强度难得到保证。国内外学者将机器人技术与临床康复医学结合,提出基于康复机器人的辅助训练方案,康复机器人能发挥其优势进行重复性高强度的劳作,减轻医护人员负担,增加患者获得康复治疗的机会,并保证康复训练强度。同时,康复机器人精度高、智能化,能够自动记录训练数据,提供客观、详细的评价参数,进而进一步调整治疗方案,提升康复训练效果和患者治疗积极性,早日恢复健康水平。
3、目前康复机器人根据其结构形式,主要分为末端引导式和外骨骼式两类。以上肢康复机器人为例,末端引导式机器人是通过末端执行器带动人体手部运动,从而实现整个上肢的康复训练,其侧重关注末端手部的运动轨迹,而对于具体的上肢某部位的训练,可能会引入不需要的康复运动。外骨骼式机器人可穿戴到上肢上,其各关节转轴和人体关节转轴一一重合,可对上肢各关节进行精确控制,以实现上肢的单关节独立运动和多关节复合运动,并可通过限制各关节运动范围,避免患肢二次受伤。考虑到目前88%的脑卒中幸存者,上肢运动功能在某种程度上受到限制,与下肢康复相比,上肢复杂的解剖结构使其恢复更加复杂。因此,上肢外骨骼康复机器人开始逐渐成为康复医学工程领域中的研究热点、重点和难点。
4、随着计算机、传感器等技术的快速发展,外骨骼康复机器人的研究得到了全面发展。上肢外骨骼康复机器人中比较有代表性的研究,有加拿大皇后大学研发了绳驱动的外骨骼medarm、瑞士苏黎世大学的外骨骼armin系列,以及其与hocoma ag公司商业化推出的armeo power上肢康复外骨骼、华盛顿大学的caden-7七自由度上肢动力外骨骼、哈尔滨工业大学的hit-5系统及浙江大学的zjuesa系统等。此类外骨骼康复机器人均设计为典型的仿生手臂结构形式,肩、肘关节多数拟人体上肢对应关节分布特征布置,这就要求人机对应关节的轴线/心在康复训练过程中始终保持对齐或重合,而人体肩关节(盂肱关节)的位置由肩锁关节、胸锁关节、肱骨姿态等共同决定,外骨骼的机械轴线较难实时与盂肱关节轴线/心对齐或重合,容易出现人机运动不相容问题。且此类设备结构、传动和控制均需要严密设计,穿戴较复杂,成本较高。
5、自2000年开始,匈牙利的toth等开发了由两台串联工业机器人构成的reharob系列机器人系统,并通过分析、分解康复师对病人的康复手法动作,提取出45种不同类型的三维肩肘动作,使机器人系统能够带动病人实现持续被动运动(cpm)动作。该系列机器人采用的是未经改造的工业机器人,对于康复治疗过程中的肌力训练所要求的人机交互柔顺性、安全性等方面,依然有待验证,并只开发了用于扩展关节活动度的被动训练模式,对于肌肉力量的训练效果仍未可知;但其首创性地提出了使用多机器人来进行康复训练,为研究外骨骼康复机器人提供了全新的思路。
6、cn201510812527.9并联下肢康复机器人自适应训练控制方法及康复机器人,根据采集的肌电信号估计下肢肌肉活动和收缩力状态,并依此自适应调节机器人的阻抗模型参数;同时获取患者与机器人间的交互作用力,通过识别结果和阻抗模型实现对机器人运动的计算和修正;康复机器人主控制部分提供在线轨迹规划及运动学逆解,将控制指令发送至相应关节的控制器和驱动器,实现机器人的自适应训练控制。该发明能够在康复过程中实现智能化,对改善患者康复效果、提高患者康复的主动性和积极性,具有十分重要的现实意义和应用价值。
7、cn201610243458.9按患者运动所需辅助的下肢康复机器人自适应控制方法,通过实时采集患者下肢的关节角度和关节角速度信号,利用鲁棒变结构控制方法实现期望的轨迹自适应跟踪控制;然后,借助人机动力学系统模型,利用rbf神经网络实时学习患者的康复程度和主动运动能力,进而估算出下肢康复机器人的前馈助力;接着,基于轨迹跟踪误差自适应地衰减机器人的实时助力,实现连续自适应地按患者康复所需的辅助控制;最后,将经过按患者康复需求辅助自适应控制修正后的轨迹输入到下肢康复机器人关节运动控制器中,进行在线运动控制,实现连续无缝的按患者康复所需辅助的下肢康复机器人自适应控制。
8、上述例举的现有技术表明,当下主要根据已有的机器人结构,对算法进行改进,以达到自适应调整的目的,但现有外骨骼康复机器人又存在有结构设计较复杂、穿戴较困难、人机交互欠柔顺的局限,从而导致自适应效果并不是理想。
9、基于此,本发明通过开发出一种全新的自适应可重构虚拟外骨骼康复机器人系统,并提供该系统的自适应方法,以通过新的机器人系统克服现有外骨骼康复机器人在结构设计较复杂、穿戴较困难、人机交互欠柔顺的局限的同时,并根据用户需求,自适应调整机器人系统。
技术实现思路
1、本发明解决的目的在于提供一种自适应可重构虚拟外骨骼康复机器人系统的自适应方法,以克服现有外骨骼康复机器人在结构设计较复杂、穿戴较困难、人机交互欠柔顺的局限的同时能够根据患者病情需求,合理地调整机器人系统,以执行对应的康复训练方案。
2、为了达到上述目的,本发明提供一种自适应可重构虚拟外骨骼康复机器人系统的自适应方法,其采用的技术方案如下:
3、一种自适应可重构虚拟外骨骼康复机器人系统的自适应方法,所述系统包括:
4、第一多轴机器人,所述第一多轴机器人具有第一执行末端;
5、第二多轴机器人,所述第二多轴机器人具有第二执行末端;
6、第三多轴机器人,所述第三多轴机器人具有第三执行末端;
7、第一承载辅具,所述第一承载辅具与所述第一执行末端可拆卸连接;
8、第二承载辅具,所述第二承载辅具与所述第二执行末端可拆卸连接;
9、第三承载辅具,所述第三承载辅具与所述第三执行末端可拆卸连接;
10、摄像组件,用于采集图像数据;
11、所述自适应方法包括:
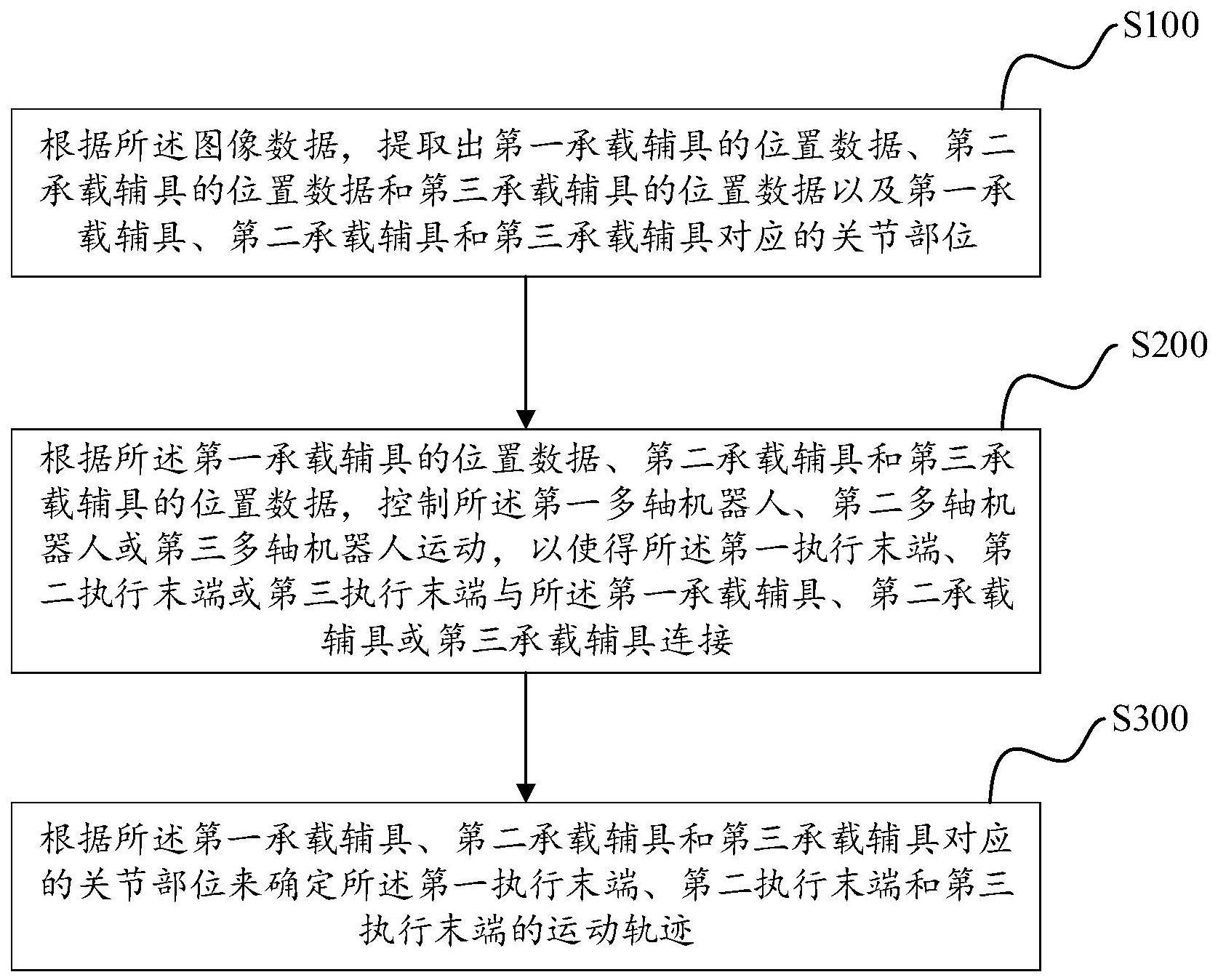
12、根据所述图像数据,提取出第一承载辅具的位置数据、第二承载辅具的位置数据和第三承载辅具的位置数据以及第一承载辅具、第二承载辅具和第三承载辅具对应的关节部位;
13、根据所述第一承载辅具的位置数据、第二承载辅具和第三承载辅具的位置数据,控制所述第一多轴机器人、第二多轴机器人或第三多轴机器人运动,以使得所述第一执行末端、第二执行末端或第三执行末端与所述第一承载辅具、第二承载辅具或第三承载辅具连接;
14、根据所述第一承载辅具、第二承载辅具和第三承载辅具对应的关节部位来确定所述第一执行末端、第二执行末端和第三执行末端的运动轨迹。
15、进一步地,所述根据所述第一承载辅具的位置数据、第二承载辅具的位置数据,控制所述第一多轴机器人、第二多轴机器人或第三多轴机器人运动,以使得所述第一执行末端、第二执行末端或第三执行末端与所述第一承载辅具、第二承载辅具或第三承载辅具连接,具体包括:
16、确定所述第一执行末端、第二执行末端或第三执行末端的位置数据;
17、根据所述第一执行末端、第二执行末端或第三执行末端的位置数据以及所述第一承载辅具的位置数据、第二承载辅具和第三承载辅具的位置数据,确定第一执行末端运动到与所述第一承载辅具相连接的位置处的第一轨迹、第二执行末端运动到与所述第二承载辅具相连接的位置处的第一轨迹或第三执行末端运动到与所述第三承载辅具相连接的位置处的第一轨迹;
18、根据所述第一轨迹、第二轨迹或第三轨迹控制所述第一多轴机器人、第二多轴机器人或第三多轴机器人运动,以使得所述第一执行末端、第二执行末端或第三执行末端与所述第一承载辅具、第二承载辅具或第三承载辅具连接。
19、进一步地,在根据所述第一承载辅具、第二承载辅具和第三承载辅具对应的关节部位来确定所述第一执行末端、第二执行末端和第三执行末端的运动轨迹之后,所述方法还包括:
20、根据所述第一执行末端、第二执行末端和第三执行末端的运动轨迹分别确定所述第一执行末端、第二执行末端和第三执行末端的运动方程;
21、根据输入指令,调整所述运动方程。
22、进一步地,所述第一多轴机器人包括:
23、第一底座;
24、第一驱动组件,所述第一驱动组件设置于所述第一底座;
25、第一轴,所述第一轴设置于所述第一驱动组件的输出端;
26、第二轴,所述第二轴设置于所述第一轴;
27、第二驱动组件,所述第二驱动组件设置于所述第二轴;
28、第三轴,所述第三轴设置于所述第二驱动组件的输出端;
29、第四轴,所述第四轴的一端连接所述第三轴,其另一端连接所述第一执行末端。
30、进一步地,所述第二多轴机器人包括:
31、第二底座;
32、第三驱动组件,所述第三驱动组件设置于所述第二底座;
33、第五轴,所述第五轴设置于所述第三驱动组件的输出端;
34、第六轴,所述第六轴设置于所述第五轴;
35、第四驱动组件,所述第四驱动组件设置于所述第六轴;
36、第七轴,所述第七轴设置于所述第四驱动组件的输出端;
37、第八轴,所述第八轴的一端连接所述第七轴,其另一端连接所述第二执行末端。
38、进一步地,所述第二执行末端包括:
39、安装组件,所述安装组件设置于所述第八轴的一端;
40、旋转驱动组件,所述旋转驱动组件设置于所述安装组件;
41、配合组件,所述配合组件设置于所述旋转驱动组件的输出端。
42、进一步地,所述第一承载辅具包括:
43、背带,所述背带用于可拆卸地固定于人体;
44、第一适配组件,所述第一适配组件设置于所述背带的外侧面,所述第一适配组件与所述第一执行末端配合以实现所述第一多轴机器人与所述第一承载辅具的可拆卸地连接。
45、进一步地,所述第二承载辅具包括:
46、上肢部缚带,所述上肢部缚带用于可拆卸地固定在人体的上肢部中的部分位置;
47、第二适配组件,所述第二适配组件设置于所述上肢部缚带的外侧面,所述第二适配组件与所述第二执行末端配合以实现所述第二多轴机器人与所述第二承载辅具的可拆卸地连接。
48、进一步地,所述第三承载辅具包括:
49、下肢部缚带,所述下肢部缚带用于可拆卸地固定在人体的下肢部中的部分位置;
50、第三适配组件,所述第三适配组件设置于所述下肢部缚带的外侧面,所述第三适配组件与所述第三执行末端配合以实现所述第三多轴机器人与所述第三承载辅具的可拆卸地连接。
51、进一步地,所述第一承载辅具、第二承载辅具以及第三承载辅具上均设置有传感器组件。
52、本发明的有益效果是:
53、本发明所提出的自适应方法,基于创新提出地自适应可重构虚拟外骨骼康复机器人系统,根据人体主要的肢体关节的康复运动,典型的如肩关节、肘关节、腕关节、髋关节、膝关节、踝关节等,当病人安置在指定位置时,系统根据选择的康复部位,自动识别(如图像识别)患者如肩关节的位置,相应的机械臂自动对接患者的肩部、上臂,做好康复准备,系统内部根据该关节的生理结构,患者的病情(活动范围、疼痛等级),调用并修正对应的关节运动模型,并按照指定的康复训练方案开始训练。
- 还没有人留言评论。精彩留言会获得点赞!