适用于狭窄腔道手术场景的触觉反馈方法、装置及系统
本发明涉及人机交互,尤其涉及一种适用于狭窄腔道手术场景的触觉反馈方法、装置及系统。
背景技术:
1、无论是经狭窄自然腔道还是介入类型手术,外科医生所获取到的视觉信息是目前唯一可靠的手术实况资料,大多数手术器械依赖机械的稳定性实现控制的精准性。随着手术机器人自动化程度的推进,以及外科医生手术操作方式的灵活转变,视觉信息融合触觉信息,为医生提供多维度的手术感知已经成为了手术机器人的人机交互部分下一阶段的研究热点。
2、在具体的触觉反馈实现方式上,使用机械结构产生触觉的装置,例如forcedimension公司的各类力反馈操作主手、3d systems公司的touch系列、haption公司的多自由度力反馈操作杆等,均在诸多行业内实现了广泛的应用,但这类装置由于机械摩擦和自身结构的特点,均未能充分地获取外科医生的信任来实现在微创手术中的安全使用。
3、目前也有较多研究集中在这一领域,包括:使用高温超导体材料的阵列式电磁线圈肿瘤消融技术;阵列形式的由电磁能转换为机械能,用作触感显示的装置及方法;用于触觉的微型电磁线圈阵列;使用神经网络方法确定参数调整的远程触感反馈装置;使用组合电磁铁的方式为用户提供指尖触觉反馈;在鼠标基本构型的基础之上添加了触觉反馈的软硬件功能;用于眼部手术的电磁线圈聚焦阵列,同时从工作空间的角度分析了电磁线圈及其阵列排布方式的优化设计等。
4、现有技术存在以下缺点或不足:
5、(1):商业上,例如美国公司https://www.geeplus.com/,提供了各类以螺线管为主的封闭式驱动装置,但其所能够提供的触觉应用受到结构的极大限制。又例如cirruslogic公司所研发的触觉驱动器,是在其音频研发d类放大器的基础上所开发的针对lra或者vcm的驱动器。例如nidec公司所研发的直线线性马达,提供单轴的移动式触感。例如boreas公司所设计的系列触觉探索套件。例如tdk公司开发的薄片形触觉致动器。例如texas instruments公司所研发的针对各类触感元件的驱动器。上述所提到的触觉驱动器在消费类电子领域可以得到很广泛的应用,但是在医疗领域,上述产品自身所带有的开环特性,导致在病人生命安全的关键场景下,无法使病人本身以及医生信赖这样的触觉反馈装置或者元器件。
6、(2):现有的基于螺线管形式的触觉生成装置,体积相对较大,需要能够提供大功耗的定制化驱动,并且价格相对昂贵。例如在文章《rendering of virtual volumetricshapes using an electromagnetic-based haptic interface》中,电磁线圈阵列的体积与有效作用范围的比例不协调,如果考虑到在实际微创外科手术中应用这样的机构,首先需要占用宝贵的手术室空间,过大的操作装置会使得医生多任务操作不便,此外如果考虑到涉及核磁共振mri的操作事项,则需要更谨慎的设计触觉反馈装置的外形与有效作用范围,以防止与现有手术器械相互发生干扰。
7、(3):目前触觉反馈的专利中,并没有同时适配于经自然腔道和血管介入的装置发明以及软硬件方法,这一部分发明仍然处于相对空白状态。
8、(4):目前没有能够同时实现触觉定位与反馈功能的精细式装置,各类现存的触觉反馈装置没有很好地与触觉传感器结合,导致虽然在算法内部引入电流闭环,但最终反馈到人手上的感受依然无法进行有效的测量,尤其是在微创手术的场景应用下,有概率造成的不可预期的致命后果。
9、(5):在指端触觉部分,其他应用均没有考虑与肌肉触觉相结合。在微创外科手术的现有操作模式下,医生在操作中不仅匮乏指尖的触觉反馈,同时对于手掌、手腕以及手肘部分的肌肉反馈同样没有得到有效利用。
技术实现思路
1、本发明提供的适用于狭窄腔道手术场景的触觉反馈方法、装置及系统,用于解决现有技术中存在的上述至少一个问题。
2、本发明提供的一种适用于狭窄腔道手术场景的触觉反馈方法,包括:
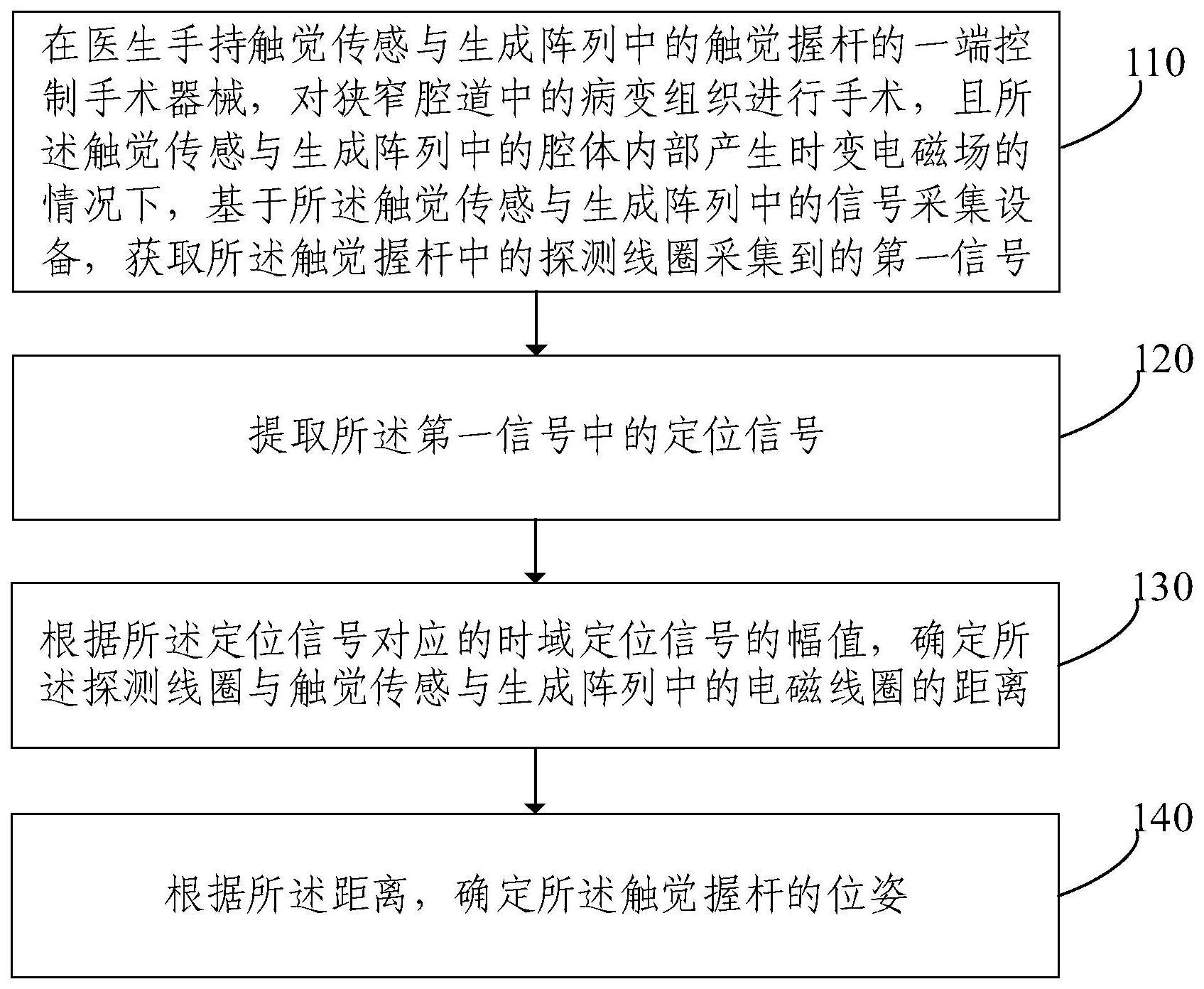
3、在医生手持触觉传感与生成阵列中的触觉握杆的一端控制手术器械,对狭窄腔道中的病变组织进行手术,且所述触觉传感与生成阵列中的腔体内部产生时变电磁场的情况下,基于所述触觉传感与生成阵列中的信号采集设备,获取所述触觉握杆中的探测线圈采集到的第一信号,所述触觉握杆的另一端伸入到所述腔体内部产生的所述时变电磁场所在区域,所述腔体包括多个按照对称冗余方式排列的电磁线圈,在确定每个电磁线圈均输入触觉驱动序列信号的情况下,所述腔体用于产生所述时变电磁场;
4、提取所述第一信号中的定位信号;
5、根据所述定位信号对应的时域定位信号的幅值,确定所述探测线圈与触觉传感与生成阵列中的电磁线圈的距离;
6、根据所述距离,确定所述触觉握杆的位姿。
7、根据本发明提供的一种适用于狭窄腔道手术场景的触觉反馈方法,
8、所述根据所述距离,确定所述触觉握杆的位姿,包括:
9、根据触觉握杆的姿态角度、所述时域定位信号的相位和频率,确定所述触觉握杆的第一位置和姿态,所述姿态角度是根据所述触觉握杆中的惯性测量单元采集到的角度信号确定的;
10、根据计算得到的所述时变电磁场的第一磁场强度和测量得到的所述时变电磁场的第二磁场强度的对比结果,对所述第一位置和所述位姿进行校正,所述第一磁场强度是根据所述触觉握杆的第二位置和所述触觉握杆的驱动电流确定的,所述第二位置是根据所述距离确定的,所述第二磁场强度是根据所述触觉握杆中的霍尔传感器测量得到的;
11、根据所述校正后的第一位置和姿态,确定所述触觉握杆的位姿。
12、根据本发明提供的一种适用于狭窄腔道手术场景的触觉反馈方法,所述根据所述校正后的第一位置和姿态,确定所述触觉握杆的位姿之后,所述方法,还包括:
13、根据所述触觉握杆的驱动电流和所述电磁线圈的个数,确定电流矩阵;
14、根据所述校正后的第一位置和所述电磁线圈的个数,确定位置矩阵;
15、根据所述校正后的姿态和所述电磁线圈的个数,确定姿态矩阵;
16、根据所述电流矩阵、所述位置矩阵和所述姿态矩阵,确定第一矩阵;
17、根据所述触觉握杆中的力传感器采集到的触觉握杆的力反馈数据及所述触觉握杆期望达到的力反馈数据,对所述触觉握杆的驱动电流和所述第一矩阵进行校准,并获取校准后的驱动电流和第一矩阵;
18、根据所述触觉握杆中的触觉传感器采集到的目标触觉信号及期望测量到的触觉信号,对校准后的驱动电流和第一矩阵进行校准,得到第二矩阵;
19、将所述目标触觉信号和所述期望测量到的触觉信号作为负反馈控制器的输入变量,并根据所述第二矩阵,确定目标驱动电流,所述目标驱动电流作为所述触觉握杆的触觉反馈信号。
20、根据本发明提供的一种适用于狭窄腔道手术场景的触觉反馈方法,所述提取所述第一信号中的定位信号,包括:
21、对所述第一信号进行傅里叶变换,获取不同频段下的触觉信号和定位信号;
22、基于带通滤波器滤除所述触觉信号,获取所述定位信号。
23、根据本发明提供的一种适用于狭窄腔道手术场景的触觉反馈方法,所述定位信号对应的时域定位信号的幅值、相位和频率的获取方式,包括:
24、对所述定位信号进行所述希尔伯特变换,获取所述定位信号对应的时域定位信号的幅值、相位和频率。
25、本发明还提供一种适用于狭窄腔道手术场景的触觉反馈装置,包括,上述任一种所述的适用于狭窄腔道手术场景的触觉反馈方法中的所述触觉传感与生成阵列。
26、根据本发明提供的一种适用于狭窄腔道手术场景的触觉反馈装置,还包括:
27、自由度平台,包括部署在所述自由度平台的末端执行器上的第一部件和第二部件,所述第一部件用于放置所述医生的手腕,所述第二部件用于在确定医生手持所述触觉握杆的一端控制所述手术器械,对狭窄腔道中的病变组织进行手术的情况下,测量与所述手术器械连接的外鞘在所述狭窄腔道内行进时,所述手腕感知到的触觉。
28、本发明还提供一种适用于狭窄腔道手术场景的触觉反馈系统,包括:
29、第一获取模块,用于在医生手持触觉传感与生成阵列中的触觉握杆的一端控制手术器械,对狭窄腔道中的病变组织进行手术,且所述触觉传感与生成阵列中的腔体内部产生时变电磁场的情况下,基于所述触觉传感与生成阵列中的信号采集设备,获取所述触觉握杆中的探测线圈采集到的第一信号,所述触觉握杆的另一端伸入到所述腔体内部产生的所述时变电磁场所在区域,所述腔体包括多个按照对称冗余方式排列的电磁线圈,在确定每个电磁线圈均输入触觉驱动序列信号的情况下,所述腔体用于产生所述时变电磁场;
30、第二获取模块,用于提取所述第一信号中的定位信号;
31、第三获取模块,用于根据所述定位信号对应的时域定位信号的幅值,确定所述探测线圈与触觉传感与生成阵列中的电磁线圈的距离;
32、触觉定位模块,用于根据所述距离,确定所述触觉握杆的位姿。
33、本发明还提供一种电子设备,包括处理器和存储有计算机程序的存储器,所述处理器执行所述程序时实现如上述任一种所述适用于狭窄腔道手术场景的触觉反馈方法。
34、本发明还提供一种非暂态计算机可读存储介质,其上存储有计算机程序,该计算机程序被处理器执行时实现如上述任一种所述适用于狭窄腔道手术场景的触觉反馈方法。
35、本发明还提供一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述任一种所述适用于狭窄腔道手术场景的触觉反馈方法。
36、本发明提供的适用于狭窄腔道手术场景的触觉反馈方法、装置及系统,设计了一种适用于外科手术场景的触觉传感与生成阵列,将电磁线圈按对称冗余形式排列,形成触觉腔体,用于模拟在手术器械在狭窄腔道中的实时触觉,可以实现对狭窄腔道内手术器械操作的触觉定位。
- 还没有人留言评论。精彩留言会获得点赞!