一种智能感知和自动化控制的按摩器的制作方法
本发明涉及自动控制,尤其涉及一种智能感知和自动化控制的按摩器。
背景技术:
1、近年来,随着社会的快速发展和生活节奏的加快,越来越多的人们受到了各种身体健康问题的困扰,其中常见的如肌肉疲劳、颈椎疾病、腰背疼痛等。这些问题的出现在很大程度上与长时间的工作、缺乏锻炼和日常的不良坐姿等有关。为此,市场上出现了各种按摩器材,从传统的手工按摩椅、按摩垫到现代的按摩机器人,它们都试图为人们提供一个快速而有效的缓解方法。
2、传统的按摩设备,如按摩椅和按摩垫,主要通过固定的程序进行按摩,用户可以根据自己的需要选择不同的按摩模式和强度。这些设备的主要优点是操作简单,但缺点是它们缺乏针对性。每个人的身体结构、疼痛点和舒适感受都是独特的,而传统设备往往提供的是“一刀切”的解决方案,不能根据用户的实际情况进行个性化的调整。
3、随后,随着传感技术和人工智能的发展,市场上出现了智能按摩机器人。这些机器人可以根据传感器检测到的数据调整按摩的强度和位置,从而更好地满足用户的需求。然而,这些机器人在实际操作中还存在一些问题。首先,它们在获取用户身体数据时仍然依赖于外部设备,如摄像头或手持传感器,这使得整个过程变得复杂且不够精确。其次,尽管这些机器人可以调整按摩的强度和位置,但它们仍然缺乏对用户身体深层次的了解,因此很难实现真正的个性化按摩。
4、此外,现有的技术中,大多数智能按摩机器人还没有充分利用3d建模技术。3d建模可以为机器人提供更为详细和精确的身体数据,从而使按摩更加针对性。但要获得这样的3d模型,通常需要复杂的设备和长时间的扫描过程,这无疑增加了用户的不便。
5、综上所述,尽管现有技术在某些方面已经取得了一定的进展,但在实现真正的个性化、高效和精确的按摩方面仍然存在许多问题。因此,急需一种新的方法或装置,能够快速而精确地获取用户的身体数据,实现针对性的按摩,同时简化整个操作过程,为用户提供更为舒适和高效的按摩体验。。
技术实现思路
1、有鉴于此,本发明的主要目的在于提供一种智能感知和自动化控制的按摩器,本发明通过结合3d模型技术、实时传感反馈和智能调整策略,为用户提供个性化、精确和自适应的按摩体验,显著提高了按摩效果与舒适度。
2、为达到上述目的,本发明的技术方案是这样实现的:
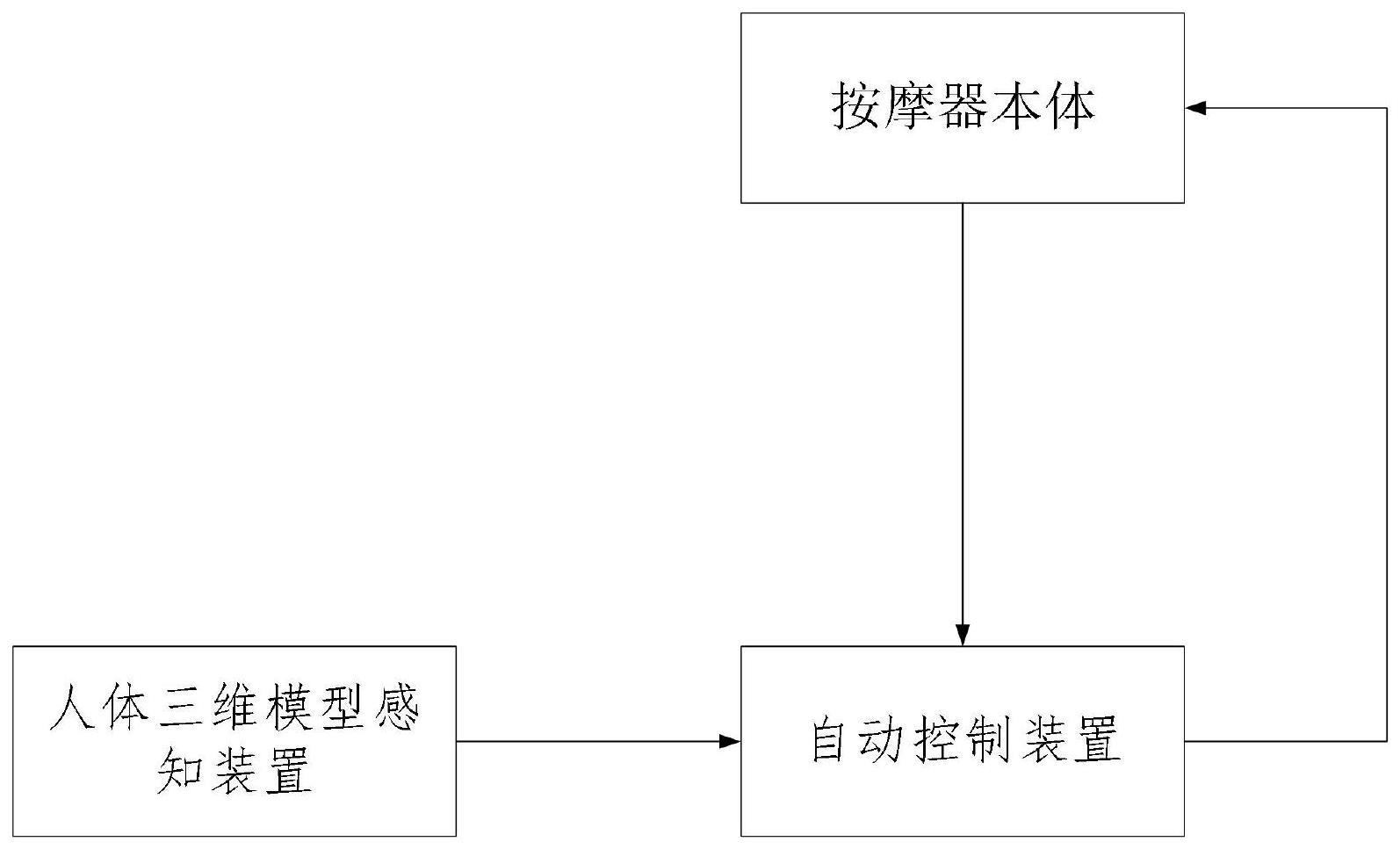
3、一种智能感知和自动化控制的按摩器,所述按摩器包括:按摩器本体,人体三维模型感知装置和自动控制装置;所述按摩器本体至少包括:传感器组、多个按摩器件和驱动电路;所述按摩器件在驱动电路的驱动下移动到使用者的不同身体区域,并在驱动电路的驱动下进行对应力度的按摩;所述传感器组包括多个传感器子组,每个传感器子组设置于一个按摩器件上,配置用于感知按摩器所处的使用者的身体区域的皮肤压力和肌肉紧张度;所述人体三维模型感知装置,配置用于构建使用者的三维模型;所述自动控制装置,配置用于基于三维模型,确定按摩区域所处的位置,生成第一控制指令发送至驱动电路,以使得驱动电路驱动按摩器件移动到按摩区域所述的位置,进行按摩,同时在按摩时,基于传感器组中各个子传感器组感知到的皮肤压力和肌肉紧张度,生成第二控制指令,发送至驱动电路,驱动电路按照第二控制指令,驱动按摩器执行对应力度的按摩。
4、进一步的,所述传感器子组包括:压力传感器和肌肉电阻抗传感器;所述压力传感器直接感知皮肤压力;所述肌肉电阻抗传感器在按摩器对使用者进行按摩时,感知肌肉电阻和肌肉振动频率,计算出肌肉实时电阻抗值,基于计算得到的实时电阻抗值和设定的肌肉电阻抗基线值,计算肌肉紧张度。
5、进一步的,所述肌肉电阻抗传感器在按摩器对使用者进行按摩时,计算出肌肉实时电阻抗值肌肉的实时电阻抗值的方法包括:使用如下公式,计算得到肌肉的实时电阻抗值:
6、
7、其中:z是肌肉的实时电阻抗值;r肌肉电阻,为设定值;xc为肌肉电容抗;xl为肌肉电感抗;所述肌肉电容抗使用如下公式计算得到:
8、
9、其中,f为肌肉振动频率;使用如下公式,计算得到肌肉电感抗:
10、xl=2πfl。
11、进一步的,所述肌肉紧张度使员如下公式计算得到:
12、inten=r*|lg(1+f)|*(z-zbaseline);
13、其中,inten为肌肉紧张度,zbaseline为肌肉电阻抗基线值。
14、进一步的,所述人体三维模型感知装置包括:结构光投影装置、图像获取装置和计算装置;所述人体三维模型感知装置构建使用者的三维模型的方法包括:使用结构光投影装置,将编码的光投影到人体表面,然后使用图像获取装置捕捉投影后的图像;计算装置通过解码投影图案,计算出人体表面各点的深度信息,再基于深度信息,得到深度图像,将深度图像中将每个像素的深度值转换为三维坐标,重建初始点云,应用滤波算法来消除初始点云的噪声,利用迭代最近点算法,估计非刚性变换来将初始点云进行姿态对齐,使用高阶的非刚性形状优化方法,将初始点云变形为人体形状的三维模型,将采集的人体图像投影到三维模型表面,实现纹理信息的融合,对每个三角面片,计算其在图像中的投影,然后进行纹理映射和插值,完成使用者的三维模型的构建。
15、进一步的,所述将深度图像中将每个像素的深度值转换为三维坐标,重建初始点云的方法包括:使用如下公式将每个像素的深度值转换为三维坐标:
16、
17、
18、zi=di
19、其中,(ui,vi)是深度图像中的像素位置,d是像素的深度值,(cx,cy)是深度图像的中心坐标,f为焦距;i为下标,取值为正整数,取值范围为1到n,n为深度图像中像素的数量;以此得到初始点云pi=(xi,yi,zi);其中,xi,yi,zi分别为初始点云的x轴坐标、y轴坐标和z轴坐标。
20、进一步的,所述利用迭代最近点算法,估计非刚性变换来将初始点云进行姿态对齐的方法包括:设定迭代最近点算法的目标函数为:
21、
22、其中,r是旋转矩阵,t是平移向量,pi是初始点云,qi是参考点云;为目标函数;对于每一个点,计算变换后的初始点云中的点r·pi+t,然后计算该点到参考点云中对应点qi的二阶范数的平方;二阶范数的平方表示了初始点云和参考点云之间的误差;通过调整旋转矩阵r和平移向量t来最小化所有初始点云和参考点云之间的距离误差的总和;对于所有点,将它们的误差距离平方进行累加,得到目标函数找到最优的旋转矩阵r和平移向量t,使得目标函数达到最小值;通过迭代优化r和t,迭代最近点算法会将初始点云与参考点云对齐,从而实现初始点云的姿态对齐;所述使用高阶的非刚性形状优化方法,将初始点云变形为人体形状的三维模型的方法包括:构建一个能量函数,该能量函数由形状正则化项和数据拟合项组成,使用形状正则化项来保持三维模型的平滑性和一致性,使用数据拟合项来测量变形后的三维模型与变形前的姿态对齐的初始点云的吻合程度;通过迭代优化过程来最小化能量函数,在每次迭代中,调整姿态对齐的初始点云的坐标,以减少能量函数的值,从而使模型形状更接近真实形状,在进行了设定次数的迭代后,完成初始点云到人体形状的三维模型的变形。
23、进一步的,进行纹理映射和插值的方法包括:使用如下公式进行纹理映射和差值:
24、ti=(1-α-β)·ta+α·tb+β·tc;
25、其中,(α,β)是三角面片的重心坐标,ta、tb、tc是三角面片的三个顶点的纹理坐标;ti为三角面片中某个像素点的纹理坐标。
26、进一步的,所述自动控制装置,基于三维模型,确定按摩区域所处的位置时,将三维模型中的肩部区域、颈部区域、背部区域、腿部区域和腰部区域筛选出来作为按摩区域。
27、进一步的,所述自动控制装置生成第一控制指令发送至驱动电路,基于传感器组中各个子传感器组感知到的皮肤压力和肌肉紧张度,生成第二控制指令,发送至驱动电路,驱动电路按照第二控制指令,驱动按摩器执行对应力度的按摩的方法包括:
28、使用如下公式,计算每个按摩器的按摩力度倍数:
29、
30、其中,inten为肌肉紧张度,pre为皮肤压力,k为按摩力度倍数;自动控制装置将计算得到的按摩力度倍数作为第二控制指令发送至驱动电路,驱动电路则按照该按摩力度倍数驱动按摩器执行对应力度的按摩。
31、采用上述技术方案,本发明具备以下有益效果:
32、个性化的精准按摩体验:传统按摩设备常常采用固定的按摩模式,这种方式不一定适应每个人的需求。相较于这种传统方式,本发明首先运用结构光投影装置和图像获取装置,为用户身体创建一个精确的三维模型。基于这个模型,它可以针对性地为用户选择最合适的按摩区域,例如肩部、颈部、背部等,这些常常是疼痛和不适的关键部位。与此同时,通过纹理映射和差值的技术,能够精确地映射按摩的深度和范围,确保按摩过程既深入又舒适。
33、智能适应与实时反馈:大多数现有按摩设备在进行按摩时,力度往往是静态和固定的。然而,本发明通过传感器组,能够实时感知用户的皮肤压力和肌肉紧张度。利用给定的算法,本机器人可以计算并调整按摩器的实际按摩力度,以达到最佳的效果。这种自适应的方式确保了按摩过程中的舒适性,同时避免了过重或过轻的按摩可能带来的伤害或不适。
- 还没有人留言评论。精彩留言会获得点赞!