一种膝关节假体位姿调整方法、电子设备及存储介质与流程
本发明涉及人工智能,具体涉及一种膝关节假体位姿调整方法、电子设备及存储介质。
背景技术:
1、膝关节置换术是一种用人造部件来替换患者部分膝关节的手术。当膝关节出现问题时,膝部可出现疼痛、肿胀、僵硬或难以正常活动。膝关节问题可能由多种不同的疾病引发,最常见的病因之一是骨关节炎。膝关节置换术能有效减轻膝部疼痛和改善膝关节工作方式,目前已经成为了常用的骨科手术。
2、人的膝关节表面由软骨覆盖,随着年龄的增加,软骨逐渐磨损,同时膝关节周围的骨骼、韧带也发生退变,最后造成膝关节疼痛、畸形、活动障碍。很多人都存在一种误区,觉得膝关节置换术是将整个膝盖都换掉,但并非如此,膝关节置换术主要是把膝关节表面的已经磨损成坑坑洼洼的软骨替换成金属的假体和高分子聚乙烯的耐磨垫片。
3、人工膝关节置换的类型包括全膝关节置换术(tka)和单髁关节置换术(uka)。
4、全膝关节置换术(tka)是指用人工材料置换因膝关节骨关节炎或类风湿关节炎而变形的膝关节的手术(如附图1所示),是治疗各种原因导致终末期膝关节骨性关节炎的有效手术方式。
5、近年来膝关节手术机器人技术愈发成熟,机器人辅助手术可以直观方便的进行假体规划,并且可以精准的辅助截骨执行。
6、在膝关节置换手术中,膝关节软组织张力、内外侧间隙平衡是手术成功的关键指标,但现有的膝关节手术机器人的假体位姿调整方法中却没有考虑测量膝关节的软组织张力与内外侧间隙,导致最终手术安装的假体位姿不够精准,合格率低、返修率高。
技术实现思路
1、本发明的目的在于克服上述技术不足,提供一种膝关节假体位姿调整方法、电子设备及存储介质,以解决相关技术中现有的膝关节手术机器人的假体位姿调整方法中没有考虑测量膝关节的软组织张力与内外侧间隙,导致最终手术安装的假体位姿不够精准,合格率低、返修率高的技术问题。
2、为达到上述技术目的,本发明采取了以下技术方案:
3、根据本发明的第一方面,提供了一种膝关节假体位姿调整方法,包括:
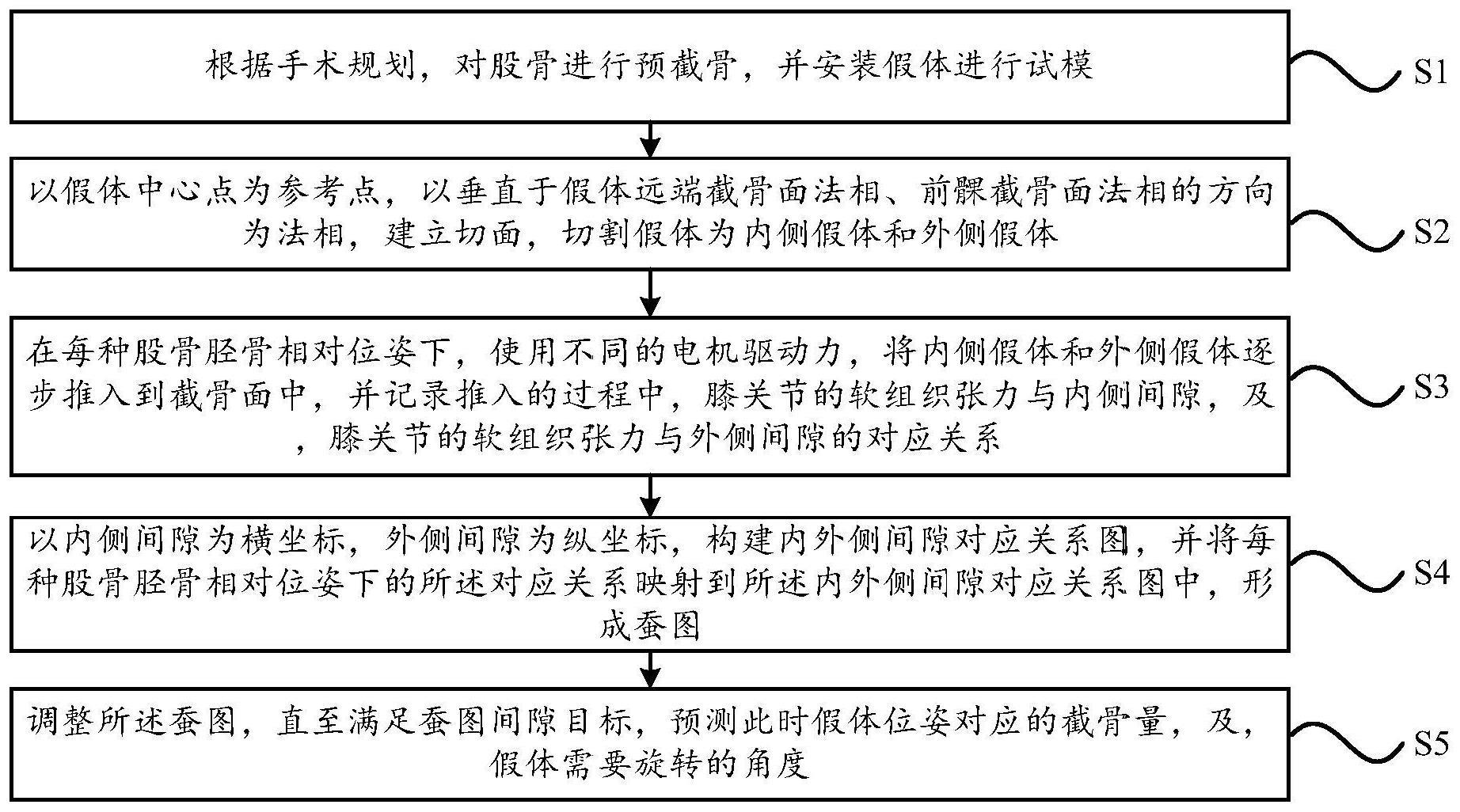
4、步骤s1、根据手术规划方案,对股骨预截骨,并安装假体进行试模;
5、步骤s2、以过假体中心点的平面为分界面,将假体划分为内侧假体和外侧假体,所述分界面垂直于远端截骨面和后髁截骨面;
6、步骤s3、获取不同股骨胫骨相对位姿下,内侧假体与胫骨之间的内侧间隙,外侧假体与胫骨之间的外侧间隙;
7、步骤s4、根据所述内侧间隙和外侧间隙,构建蚕图;
8、步骤s5、在所述蚕图上确定出内侧间隙和外侧间隙皆满足手术规划方案时的映射点;
9、步骤s6、根据所述映射点所对应的预测截骨量及假体旋转角度,对试模的假体位姿进行调整。
10、优选地,所述步骤s3获取不同股骨胫骨相对位姿下,内侧假体与胫骨之间的内侧间隙,外侧假体与胫骨之间的外侧间隙,具体为:
11、每种股骨胫骨相对位姿下,对内侧假体施加朝向股骨截骨面的第一推力,对外侧假体施加朝向股骨截骨面的第二推力;
12、以预设大小的幅度,逐步增加所述第一推力和第二推力;
13、测量第一推力每增加预设幅度大小时,股骨和胫骨之间的软组织张力及内侧间隙的大小,记为第一张力-内侧间隙;
14、测量第二推力每增加预设幅度大小时,股骨和胫骨之间的软组织张力及外侧间隙的大小,记为第二张力-外侧间隙。
15、优选地,所述步骤s4根据所述内侧间隙和外侧间隙,构建蚕图,包括:
16、将第一张力下的所有内侧间隙与第二张力下的所有外侧间隙分别进行配对,得到多个映射点;
17、以内侧间隙为横坐标,外侧间隙为纵坐标,构建蚕图坐标系;
18、将所述映射点形成在所述蚕图坐标系中,得到蚕图。
19、优选地,步骤s5在所述蚕图上确定出内侧间隙和外侧间隙皆满足手术规划方案时的映射点,包括:
20、将每种股骨胫骨相对位姿下,内侧间隙和外侧间隙的映射点,都拖动到蚕图第一象限的角平分线上且相互重合,确认此时的映射点为内侧间隙和外侧间隙皆满足手术规划方案的映射点;或者,
21、先在第一股骨胫骨相对位姿下,调整试模的内侧假体和外侧假体的位姿,直至第一股骨胫骨相对位姿下内侧间隙和外侧间隙的映射点都移动到蚕图第一象限的角平分线上;
22、再在其他股骨胫骨相对位姿下,调整试模的内侧假体和外侧假体的位姿,直至其他股骨胫骨相对位姿下内侧间隙和外侧间隙的映射点与第一股骨胫骨相对位姿下的映射点重合,确认此时的映射点为内侧间隙和外侧间隙皆满足手术规划方案的映射点。
23、优选地,内侧间隙和外侧间隙皆满足手术规划方案时的映射点所对应的预测截骨量及假体旋转角度通过以下方法获取,包括:
24、计算当前股骨胫骨相对位姿下,拖动映射点时内侧间隙变化量gap(m)和外侧间隙变化量gap(l);
25、比较gap(m)和gap(l)的大小,若两者相等,预测内侧截骨量和外侧截骨量皆为gap(m)或gap(l),假体平移,假体旋转角度为0;
26、若gap(m)和gap(l)两者不相等,将gap(m)或gap(l)两者中的较小值预测为截骨量,先将较小值所对应的一侧假体平移至满足蚕图间隙目标,再以该侧假体的最低点为旋转中心,确定假体旋转角度。
27、优选地,所述确定假体旋转角度,包括:
28、计算当前股骨胫骨相对位姿下,股骨坐标系中内侧假体的最低点坐标及外侧假体的最低点坐标,并求两个最低点之间的距离;
29、计算gap(m)和gap(l)两者的差值;
30、根据所述差值及两个最低点之间的距离,利用三角函数求解假体旋转角度。
31、优选地,所述步骤s6根据所述映射点所对应的预测截骨量及假体旋转角度,对试模的假体位姿进行调整,包括:
32、先根据所述预测截骨量,控制机器人截骨,然后再根据所述假体旋转角度,旋转假体到目标位置;或者,
33、先根据所述假体旋转角度,旋转假体到目标位置,然后再根据所述预测截骨量,控制机器人截骨。
34、优选地,所述方法,还包括:
35、对试模的假体位姿进行调整后,重新测量内侧间隙和外侧间隙;
36、计算当前内侧间隙与目标内侧间隙之间的差值,及,当前外侧间隙与目标外侧间隙之间的差值;
37、若所述差值皆在误差范围内,流程结束;否则,将不在误差范围内的差值赋值给对应侧的间隙变化量,重新调整假体位姿,直至在预设迭代次数内所述差值皆在误差范围内。
38、根据本发明的第二方面,提供了一种膝关节假体位姿调整装置,包括:
39、截骨模块,用于根据手术规划方案,对股骨预截骨,并安装假体进行试模;
40、划分模块,用于以过假体中心点的平面为分界面,将假体划分为内侧假体和外侧假体,所述分界面垂直于远端截骨面和后髁截骨面;
41、获取模块,用于获取不同股骨胫骨相对位姿下,内侧假体与胫骨之间的内侧间隙,外侧假体与胫骨之间的外侧间隙;
42、构建模块,用于根据所述内侧间隙和外侧间隙,构建蚕图;
43、确定模块,用于在所述蚕图上确定出内侧间隙和外侧间隙皆满足手术规划方案时的映射点;
44、调整模块,用于根据所述映射点所对应的预测截骨量及假体旋转角度,对试模的假体位姿进行调整。
45、根据本发明的第三方面,提供了一种电子设备,包括:
46、处理器、通信接口、存储器和通信总线,其中,处理器、通信接口、存储器通过通信总线完成相互间的通信;
47、存储器,用于存放计算机程序;
48、处理器,用于执行存储器上所存放的程序时,实现上述的方法。
49、根据本发明的第四方面,提供了一种存储有计算机指令的非瞬时计算机可读存储介质,所述计算机指令用于使计算机执行上述的方法。
50、本发明的实施例提供的技术方案可以包括以下有益效果:
51、通过获取不同股骨胫骨相对位姿下,内侧假体与胫骨之间的内侧间隙,外侧假体与胫骨之间的外侧间隙,构建蚕图并确定出满足手术规划方案时的映射点,通过该映射点对应的预测截骨量及假体旋转角度对试模的假体位姿进行调整,相比现有技术中不考虑膝关节的软组织张力与内外侧间隙的假体安装方案,明显能够提升手术的术后成功率,减少返修率。
52、应当理解的是,以上的一般描述和后文的细节描述仅是示例性和解释性的,并不能限制本发明。
- 还没有人留言评论。精彩留言会获得点赞!