一种导航手术系统的制作方法
本发明属于医疗器械,具体涉及一种导航手术系统。
背景技术:
1、利用手术机器人辅助执行的骨科手术操作例如膝关节手术中,需要监测患肢的实际位姿,并据此进行截骨或磨骨操作。实际手术过程中,患肢不可避免地发生移动,因此实践中,通过导航设备对患肢的位姿进行监测,并基于患肢的实时位姿对机械臂的截骨方向进行调整,提高截骨准确性。
2、现有技术中普遍采用光学导航来监测患肢的位姿。光学导航包括设置在患肢上的光学靶标及用于识别光学靶标的跟踪装置,跟踪装置通过识别光学靶标的位姿来监测患肢的位姿。光学导航依赖光线,当手术室内人员站位发生改变或因其他原因导致光线被遮挡,引起跟踪装置无法识别光学靶标时,光学导航失效,无法监测患肢的位姿。
技术实现思路
1、本发明的目的在于提供一种导航手术系统,旨在提高导航可靠性,降低手术风险,改善手术效果。
2、为实现上述目的,本发明提供了一种导航手术系统,包括:
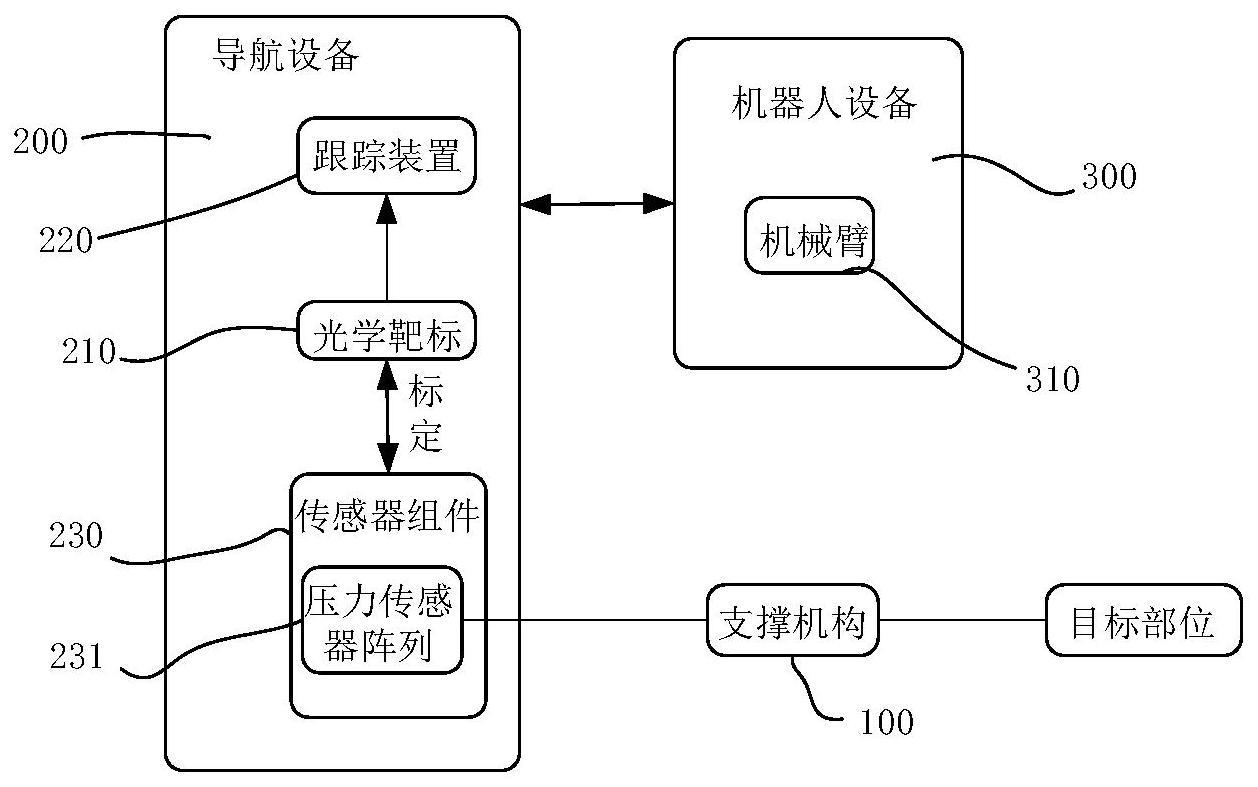
3、支撑机构,用于与目标对象的目标部位连接;
4、导航设备,包括光学靶标、跟踪装置及传感器组件;所述光学靶标用于设置在所述目标部位的目标骨骼上,所述跟踪装置用于识别所述光学靶标以获取所述光学靶标的监测位姿;所述传感器组件包括压力传感器阵列,所述压力传感器阵列设置在所述支撑机构上,并用于监测所述目标部位施加于所述支撑机构上的压力信息;所述导航设备被配置为能够根据所述压力信息及预先确定的所述压力信息与所述监测位姿之间的映射关系获取所述光学靶标的计算位姿;
5、机器人设备,与所述导航设备通信连接,并包括机械臂;
6、所述导航手术系统被配置为根据所述光学靶标的监测位姿或计算位姿对所述机械臂的运动进行控制。
7、可选地,所述目标部位包括第一区域和第二区域;所述支撑机构包括第一子支撑机构和第二子支撑机构;所述第一子支撑机构用于与所述第一区域连接,所述第二子支撑机构用于与所述第二区域连接;所述压力信息包括所述第一区域施加于所述第一子支撑机构上的第一子压力信息和所述第二区域施加于所述第二子支撑机构上的第二子压力信息;
8、所述光学靶标的数量为两个,分别为第一光学靶标和第二光学靶标,所述第一光学靶标设置在所述第一区域的所述目标骨骼上,所述第二光学靶标设置在所述第二区域的所述目标骨骼;
9、所述压力信息与所述监测位姿之间的映射关系包括所述第一子压力信息与所述第一光学靶标的监测位姿之间的映射关系、及所述第二子压力信息与所述第二光学靶标的监测位姿之间的映射关系;
10、所述导航手术系统被配置为能够根据所述第一子压力信息及所述第一子压力信息与所述第一光学靶标的监测位姿之间的映射关系获取所述第一光学靶标的计算位姿;或者,根据所述第二子压力信息及所述第二子压力信息与所述第二光学靶标的监测位姿之间的映射关系获取所述第二光学靶标的计算位姿。
11、可选地,所述压力传感器阵列包括第一压力传感器子阵列和第二压力传感器子阵列,所述第一压力传感器子阵列设置在所述第一子支撑机构上,并用于接触所述目标部位的所述第一区域,以监测所述第一子压力信息;所述第二压力传感器子阵列设置在所述第二子支撑机构上,并用于接触所述目标部位的所述第二区域,以监测所述第二子压力信息。
12、可选地,所述第一子支撑机构包括用于与所述目标部位连接的第一托板;所述第一托板为弧形曲面结构,所述第一压力传感器子阵列包括多个行和多个列,所述第一压力传感器子阵列的多个行沿所述第一托板的轴向间隔布置,所述第一压力传感器子阵列的多个列沿所述第一托板的周向间隔排布。
13、可选地,还包括承载台上,所述第一子支撑机构还包括第一支撑部和第一锁紧件,所述第一支撑部与所述第一托板铰接,所述第一支撑部还与所述承载台连接;所述第一锁紧件用于选择性地锁紧所述第一托板与所述第一支撑部或解除所述第一托板与所述第一支撑部的锁紧;当所述第一锁紧件锁紧所述第一托板与所述第一支撑部时,阻止所述第一托板相对于所述第一支撑部旋转,当所述第一锁紧件解除所述第一托板与所述第一支撑部之间的锁紧时,允许所述第一托板相对于所述第一支撑部旋转。
14、可选地,所述第二子支撑机构包括托板组合体,所述托板组合体包括用于与所述目标部位连接的第二托板;所述第二托板为弧形曲面结构;所述第二压力传感器子阵列包括多个行和多个列,所述第二压力传感器子阵列的多个行沿所述第二托板的轴向间隔排布,所述第二压力传感器子阵列的多个列沿所述第二托板的周向间隔排布。
15、可选地,还包括承载台上;所述第二子支撑机构还包括第二支撑部及第二锁紧件,所述第二支撑部与所述托板组合体铰接,所述第二支撑部与所述承载台连接;所述第二锁紧件用于选择性地锁紧所述第二支撑部和所述托板组合体或解除所述第二支撑部与所述托板组合体之间的锁紧,当所述第二锁紧件锁紧所述第二支撑部与所述托板组合体时,阻止所述托板组合体相对于所述第二支撑部旋转,当所述第二锁紧件解除所述第二支撑部与所述托板组合体之间的锁紧时,允许所述托板组合体相对于所述承载台旋转。
16、可选地,所述传感器组件还包括惯性传感器,所述惯性传感器设置在所述光学靶标上;所述惯性传感器用于监测所述目标骨骼的姿态变化信息;
17、所述导航设备被配置为根据所述压力信息及所述姿态变化信息获取所述光学靶标的计算位姿。
18、可选地,所述光学靶标的坐标系与设置在其上的惯性传感器的坐标系相互平行。
19、可选地,所述光学靶标包括支架和体和反光体,所述支架体包括四根第一连接杆和两根第二连接杆,四根所述第一连接杆依次首尾相接并形成矩形框架,两根所述第二连接杆交叉布置,且每根所述第二连接杆连接所述矩形框架相对的两个顶点;所述矩形框架的每个所述顶点处均设置有所述反光体;所述惯性传感器设置在两个所述第二连接杆的相交处。
20、与现有技术相比,本发明的导航手术系统具有如下优点:
21、前述的导航手术系统包括支撑机构、导航设备及机器人设备;所述支撑机构用于与目标对象的目标部位连接;所述导航设备包括光学靶标、跟踪装置及传感器组件;所述光学靶标用于设置在所述目标部位的目标骨骼上,所述跟踪装置用于识别所述光学靶标以获取所述光学靶标的监测位姿;所述传感器组件包括多个压力传感器,多个所述压力传感器设置在所述支撑机构上,并用于监测所述目标部位施加于所述支撑机构上的压力信息;所述导航设备被配置为能够根据所述压力信息及预先确定的所述压力信息与所述光学靶标的的监测位姿之间的映射关系获取所述光学靶标的计算位姿;所述机器人设备与所述导航设备通信连接并包括机械臂;所述导航手术系统被配置为根据所述光学靶标的监测位姿或所述计算位姿对所述机械臂的运动进行控制。该导航手术系统提供了两种可供选择的导航方式,其一为光学导航方式,其二为非光学导航方式,在导航手术系统辅助执行手术操作时,可以根据实际情况选择导航策略,例如在光学导航失效的情形下,暂时根据传感器的输出信息进行导航,这样就不会出现整个导航设备失效的情况,提高导航设备的可靠性,进而降低手术风险,改善手术效果。
- 还没有人留言评论。精彩留言会获得点赞!