基于颈部肌电的助行器控制方法、系统、介质及助行器
本发明涉及助行器控制,特别涉及基于颈部肌电的助行器控制方法、系统、介质及助行器。
背景技术:
1、目前,世界各国都面临残疾人数目庞大带来的众多民生问题。人口老龄化和慢性疾病增多也导致残疾率在不断上升。在中国,随着社会老龄化的加剧和人民生活水平的提高,由脑卒中、脊髓损伤、脑外伤等原因造成的残障人口迅速增长。人体的衰老与疾病使得部分人群出现了下肢无力,腿脚不灵活等现象,这导致他们的日常起居无法得到保障。如果强力而为,在超出自身最大负荷时,又容易造成对身体的二次损伤。随着科学技术水平的提升与传统养老方式的转变,老年人与失能人员面临着如何独立自理这一问题,如果采用传统的人工辅助法,即老年人的饮食起居和出行依靠子女的照顾和社会的照拂,不仅会给子女和社会造成一定的负担,占用大量的医疗资源和人力资源,也会由于护理资源的不充足使老年人的护理质量受到影响,不利于社会的稳定和发展。
2、目前,市场应用轮椅多注重于“人-椅”运动功能交互,重建“人-环境”的正向运动功能,解决残障人群基本的出行问题。随着生物传感器和机器人技术的发展,越来越多的研究者开始基于语音、眼电、脑电、肌电等信号源实现轮椅控制。语音控制需要一个单独的、安静的工作场所不适合嘈杂的环境,因此噪音会引起误操作;脑电控制的实时性差,且脑电信号极其敏感,甚至对生理来源包括运动的假象、肌肉噪声干扰、眼球运动或眨眼的假象、心跳都敏感,脑电信号的低信噪比和信号模式缺乏一致性的情况也影响基于脑电信号进行助行器控制的稳定性;此外,脑电控制的使用还要求用户学会有效地调节脑电波,这对用户来说是复杂且有压力的。对于眼电控制,由于人会不由自主的眨眼,经常会导致误操作;此外,由于系统依赖用户的眼睛作为输入信号,所以用户在行驶轮椅时不能自由随意的看向任意地方,并且长时间集中用眼,患者眼睛会更容易疲劳。相比脑电信号,基于肌电信号的助行器控制具备准确性高且无测量滞后性的特点,此信号的采集与处理受外界环境影响较小,更能满足助行器的多场景使用特性。基于此,急需一种基于患者颈部肌电的轮椅控制方法,通过颈部肌电信号识别协助上肢运动功能障碍的助行器使用者进行助行器的运动控制。
技术实现思路
1、为了实现本发明的上述目的和其他优点,本发明的第一目的是提供一种一种基于颈部肌电的助行器控制方法,包括以下步骤:
2、s1、连接肌电采集设备,并对所述肌电采集设备进行初始化;
3、s2、初始化颈部肌电识别节点,并发布速度话题;
4、s3、从所述肌电采集设备读取颈部肌电信号,并对所述颈部肌电信号进行识别,得到运动意图;
5、s4、根据识别得到的运动意图匹配所述速度话题中各个参数的值;
6、s5、通过匹配结果设置所述速度话题中各个参数的值;
7、s6、发布所述速度话题;
8、s7、判断是否结束轮椅颈部肌电识别控制;
9、s8、是则结束;否则返回所述s3步骤继续执行。
10、进一步地,所述s3步骤中的对所述颈部肌电信号进行识别包括以下步骤:
11、s31、对所述颈部肌电信号进行预处理;
12、s32、对预处理后的颈部肌电信号进行特征提取;
13、s33、将提取的特征作为识别模型的输入,得到头部运动意图。
14、进一步地,所述s31步骤包括以下步骤:
15、s311、采用小波滤波算法对颈部肌电信号进行滤波;
16、s312、采用最大主动收缩的峰值作为归一化标准,将肌电信号每一时刻幅值表示为最大主动收缩的百分比;
17、s313、采用双阈值法结合非线性能量算子对颈部肌电信号的始末点进行识别;
18、s314、通过滑动窗口,对一次处理的信号长度进行分割处理。
19、进一步地,所述s32步骤包括采用均方根误差作为特征,提取每个窗口内的肌电数据特征。
20、进一步地,所述s33步骤包括以提取到的均方根误差作为识别模型的输入,输出头部运动意图;其中,所述识别模型采用dafa-bilstm网络作为识别模型。
21、进一步地,所述颈部肌电信号包括左右两侧胸锁乳突肌电信号、左右两侧斜方肌电信号、左右两侧前角肌电信号、左右两侧头夹肌电信号;
22、所述运动意图包括左转、右转、前进、后退、停止。
23、进一步地,所述s2步骤中的速度话题的数据内容包括沿着x、y、z方向的线速度和角速度。
24、进一步地,所述s4步骤包括以下步骤:
25、s41、读取识别得到的运动意图;
26、s42、通过肌电控制指令表匹配所述运动意图对应的速度话题中各个参数的值;其中,所述肌电控制指令表内存储若干头部运动意图与速度话题中各个参数的值的对应关系;
27、s43、根据匹配结果设置所述速度话题中各个参数的值。
28、本发明的第二目的是提供一种基于颈部肌电的助行器控制方法,包括以下步骤:
29、s1、连接下位机,并对所述下位机进行初始化;
30、s2、初始化助行器本体底盘驱动节点,并订阅速度话题;
31、s3、读取所述速度话题的数据,并将所述速度话题的数据打包处理发送给所述下位机;
32、s4、读取所述下位机发送的小车里程计数据,并发布至系统;
33、s5、判断是否结束助行器底盘控制程序;
34、s6、是则结束;否则返回所述s3步骤继续执行。
35、进一步地,所述速度话题的数据内容包括沿着x、y、z方向的线速度和角速度。
36、进一步地,还包括以下步骤:
37、下位机通过对差速驱动轮进行逆运动学分析,得到两轮各自的转动速度;
38、给电机驱动器下发速度控制指令,控制轮毂电机的运动。
39、本发明的第三目的是提供一种计算机可读存储介质,其上存储有程序指令,所述程序指令被执行时实现上述的方法。
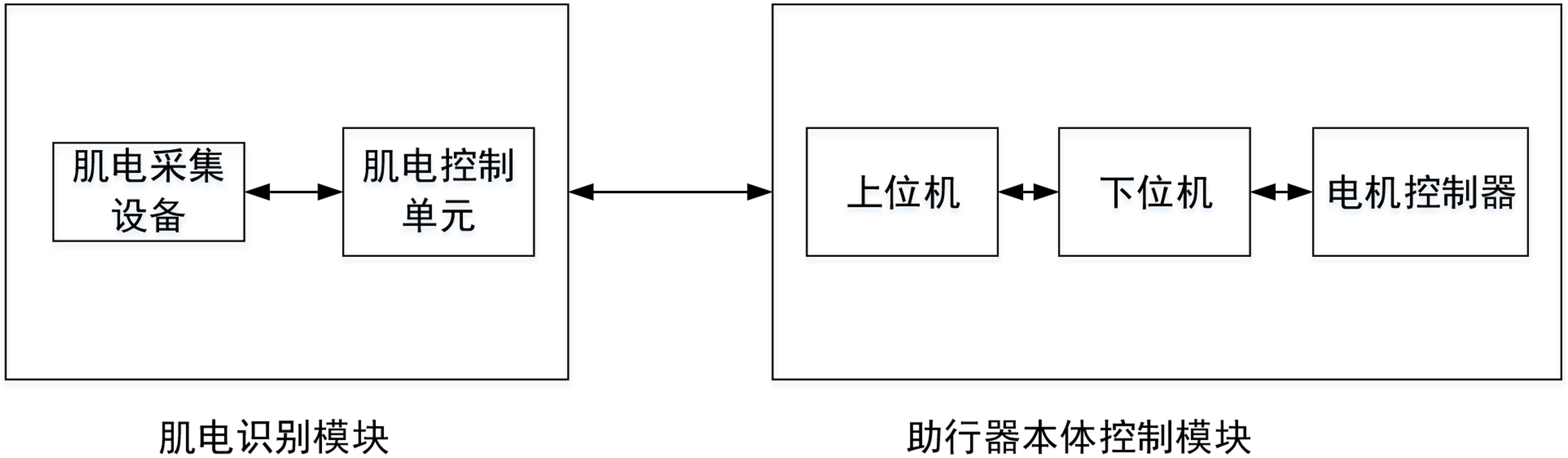
40、本发明的第四目的是提供一种实现上述的方法的基于颈部肌电的助行器控制系统,包括:肌电识别模块、助行器本体控制模块,所述肌电识别模块包括肌电采集设备、肌电控制单元,所述助行器本体控制模块包括上位机、下位机、电机驱动器;其中,
41、所述肌电采集设备用于采集用户的颈部肌电信号;
42、所述肌电控制单元用于连接所述肌电采集设备,对所述肌电采集设备进行初始化,读取采集的颈部肌电信号,初始化颈部肌电识别节点,根据所述颈部肌电信号识别运动意图,根据识别到的运动意图获取并设置速度话题中各个参数的值,发布速度话题;
43、所述上位机用于连接所述下位机,对所述下位机进行初始化,初始化助行器本体底盘驱动节点,并订阅所述速度话题,读取所述速度话题的数据,并将所述速度话题的数据打包处理发送至所述下位机,读取所述下位机发送的小车里程计数据,并发布至系统;
44、所述下位机用于通过对差速驱动轮进行逆运动学分析,得到两轮各自的转动速度,给所述电机驱动器下发速度控制指令,控制轮毂电机的运动。
45、进一步地,所述速度话题的数据内容包括沿着x、y、z方向的线速度和角速度。
46、进一步地,所述速度话题是ros系统中预先定义的geometry_msgs/msg/twist类型的数据格式。
47、进一步地,所述肌电控制单元用于对所述颈部肌电信号进行预处理,对预处理后的颈部肌电信号进行特征提取,将提取的特征作为识别模型的输入,得到头部运动意图。
48、进一步地,所述头部运动意图包括左转、右转、前进、后退、停止。
49、进一步地,所述主控单元内预置有肌电控制指令表,所述肌电控制指令表内存储若干头部运动意图与速度话题中各个参数的值的对应关系,所述主控单元通过得到的头部运动意图查找所述肌电控制指令表,得到并设置所述速度话题中各个参数的值,然后发布速度话题。
50、进一步地,所述肌电采集设备采集用户的颈部肌电信号包括左右两侧胸锁乳突肌电信号、左右两侧斜方肌电信号、左右两侧前角肌电信号、左右两侧头夹肌电信号。
51、进一步地,所述肌电控制单元对所述颈部肌电信号进行预处理包括采用小波滤波算法对所述颈部肌电信号进行滤波;使用最大主动收缩的峰值作为归一化标准,将颈部肌电信号每一时刻幅值表示为最大主动收缩的百分比;采用双阈值法结合非线性能量算子对颈部肌电信号的始末点进行识别;通过滑动窗口,对一次处理的信号长度进行分割处理。
52、进一步地,所述肌电控制单元对对预处理后的颈部肌电信号进行特征提取包括采用均方根误差作为特征,提取每个窗口内的肌电数据特征。
53、进一步地,所述肌电控制单元将提取到的均方根误差作为识别模型的输入,输出头部运动意图,所述识别模型采用dafa-bilstm网络作为识别模型。
54、本发明的第五目的是提供一种助行器,包括助行器本体,还包括上述的基于颈部肌电的助行器控制系统。
55、与现有技术相比,本发明的有益效果是:
56、针对用户手部功能运动障碍,导致无法使用摇杆操控电动轮椅的问题,本发明提出了一种基于ros2系统、采用颈部肌电来控制助行器移动的控制方案,该方案能够控制助行器进行基本的移动来到达目标位姿。基于ros2节点设计的颈部肌电识别算法与轮椅底盘运动控制程序完全解耦,故可方便地移植到其他基于ros2系统的轮椅或者订阅了/cmd_vel话题的其他移动机器人上,复用性极高。
57、本发明上述说明仅是本发明技术方案的概述,为了能够更清楚了解本发明的技术手段,并可依照说明书的内容予以实施,以下以本发明的较佳实施例并配合附图详细说明如后。本发明的具体实施方式由以下实施例及其附图详细给出。
- 还没有人留言评论。精彩留言会获得点赞!