一种牵拉结构及柔性手术机器人
本技术涉及医疗器械,具体而言,涉及一种牵拉结构及柔性手术机器人。
背景技术:
1、目前,随着科技的迅速发展,越来越多的机器人取代人应用于生产生活中,医疗领域亦是如此。传统手术使用尺寸较大的刚性手术器械,易造成较大的手术创伤,不仅加重了外科医生的工作量,而且增加了病人的伤痛和感染的风险。现有的微创手术器械中的远端牵拉结构一般采用转轴驱动导致舒张侧线松,多次使用器械后线老化变松,影响术者的控制精度。
技术实现思路
1、本技术实施例提供一种牵拉结构及柔性手术机器人,控制精度高,稳定性好,给操作者力反馈更加精准。
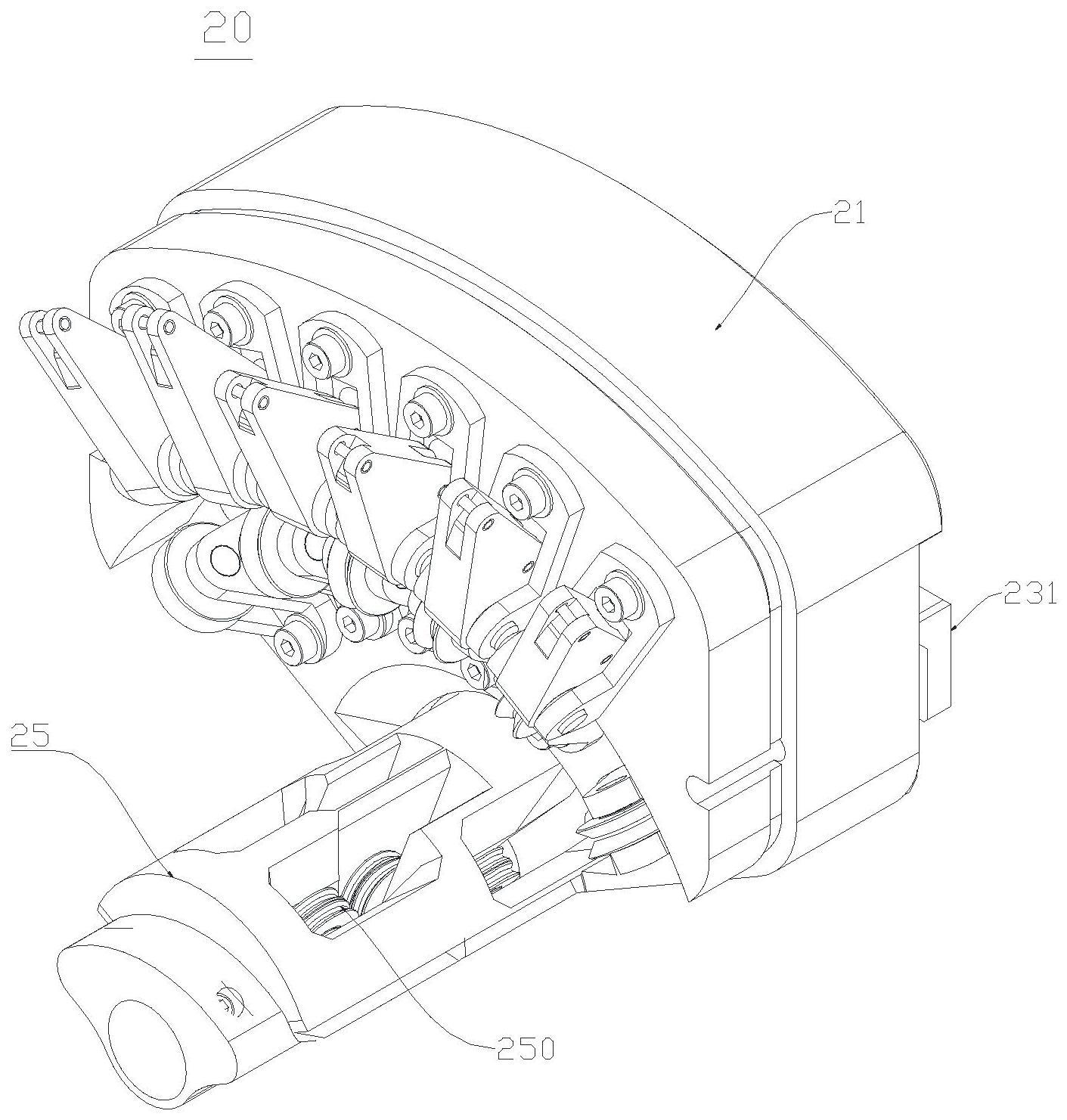
2、第一方面,本技术实施例提供一种牵拉结构,牵拉结构应用于柔性手术机器人,牵拉结构包括基座和牵拉机构,牵拉机构设置于基座,牵拉机构包括被动牵引单元、主动牵引单元和牵引绳,牵引绳连接于被动牵引单元和主动牵引单元之间,被动牵引单元和主动牵引单元共同配合,以用于驱动末端器械模块执行相应动作;其中,被动牵引单元包括弹性件和驱动盘,基座上具有沿第一方向延伸的容置槽,弹性件设置于容置槽内;驱动盘上具有呈三角形分布的铰接端、第一连线端和第二连线端,驱动盘通过铰接端转动安装于基座上靠近于末端器械模块的一侧;沿第一方向,第一连线端相较于第二连线端更靠近于弹性件,弹性件靠近于驱动盘的一侧被限位于容置槽的端壁,牵引绳包括第一被动牵引绳和第二被动牵引绳,第一被动牵引绳的一端连接于弹性件背离于驱动盘的一侧,另一端连接于第一连线端,第二被动牵引绳的一端连接于第二连线端,另一端连接于末端器械模块的对应部位,末端器械模块位于驱动盘背离于基座的一侧;主动牵引单元用于主动牵引被动牵引绳,以带动驱动盘转动并使弹性件被压缩或舒张。
3、在本方案中,通过主动牵引单元主动牵引被动牵引单元,从而通过第二被动牵引绳让驱动盘对应转动,然后利用第一被动牵引绳传动使得弹性件能够被压缩或主动舒张,而本方案通过第一被动牵引绳和第二被动牵引绳之间驱动盘的过渡设置,且对第一被动牵引绳和第二被动牵引绳在驱动盘上的连接位置的特殊设定,即驱动盘上具有呈三角形分布的铰接端、第一连线端和第二连线端,第一被动牵引绳的一端连接于弹性件背离于驱动盘的一侧,另一端连接于第一连线端,第二被动牵引绳的一端连接于第二连线端,第二被动牵引绳的另一端连接于末端器械模块的对应部位,当第二被动牵引绳受到主动牵引单元的拉力后,拉动驱动盘转动时,可以使得驱动盘在转动过程中始终受到近似的恒力牵引,即第二被动牵引绳在被牵引过程中所受的拉力相对恒定,从而让主动牵引单元的牵引力几乎透明,以便于对主动牵引单元进行力控,此种方式下,给牵引绳的拉力的稳定带来好处,使得柔性手术机器人的控制精度更高,稳定性好,能够更加直观的将力反馈给操作者。
4、在一些实施例中,铰接端、第一连线端和第二连线端在驱动盘上的连线呈钝角三角形分布,驱动盘具有初始状态和牵拉状态,当驱动盘处于初始状态时,弹性件蓄积有初始弹性势能,第二连线端与基座的距离为l1;当驱动盘处于牵拉状态时,弹性件所蓄积的弹性势能增大,第二连线端与基座的距离为l2,满足:l2>l1。
5、上述技术方案中,通过将铰接端、第一连线端和第二连线端在驱动盘上的连线呈钝角三角形分布,当驱动盘处于初始状态时,弹性件蓄积有初始弹性势能,第二被动牵引绳距离铰接端的距离较近,力矩较小,拉动驱动盘转动所需的力相对更大,当驱动盘处于牵拉状态后,第二被动牵引绳拉动驱动盘转动至第二连线端距离基座的距离变大后,力矩增大,此时所需的拉力减小,但是此时弹性件逐渐被压缩后,弹性件提供的复位力增大,那么所需的力刚好抵消,使得整个第二被动牵引绳被牵拉的过程所需的拉力几乎恒定,让柔性手术机器人的控制精度更高,稳定性好,给操作者的力反馈更安全和精确。
6、在一些实施例中,被动牵引单元还包括堵头,堵头包括本体和凸出部,本体位于弹性件外,凸出部伸入于弹性件内并与弹性件同轴线设置,弹性件与驱动盘之间通过第一被动牵引绳连接于凸出部。
7、上述技术方案中,通过在弹性件的末端设置有堵头,利用堵头的凸出部能够插入于弹性件的内孔中,第一被动牵引绳连接于凸出部,使得第一被动牵引绳在压缩弹性件的过程中,受力点位于弹性件的轴线方向,避免出现偏心传力的现象,确保第一被动牵引绳在被牵引过程中的均匀传力以及弹性件的均匀压缩或舒张,相应还延长了弹性件的使用寿命。
8、在一些实施例中,主动牵引单元包括驱动件和滑块,基座内具有沿第一方向延伸的滑槽,滑块滑动设置于滑槽内,牵引绳还包括主动牵引绳,主动牵引绳的一端连接于滑块,另一端连接于末端器械模块的对应部位,驱动件用于驱动滑块沿第一方向移动,以牵引第二被动牵引绳驱使驱动盘转动,以使弹性件被压缩或舒张。
9、上述技术方案中,通过基座内具有沿第一方向延伸的滑槽,驱动件带动滑块在基座的滑槽内沿第一方向定向滑动,滑块滑动带动主动牵引绳作用于末端器械模块的对应部位后,使得第二被动牵引绳驱使驱动盘相应转动,在第一被动牵引绳的作用下让弹性件被压缩或舒张,从而完成一个自由度的控制,该过程控制精准,第二被动牵引绳的被牵引过程中所受的拉力相对较为恒定,以确保柔性手术机器人的控制精度更高,稳定性好,能够更加直观的将力反馈给操作者。
10、在一些实施例中,主动牵引单元还包括第一滑轮组,第一滑轮组与驱动盘位于基座的同一侧,第一滑轮组包括滑轮架和第一滑轮,第一滑轮通过滑轮架转动安装于基座,第一滑轮用于对主动牵引绳远离的一端进行导向。
11、上述技术方案中,由于末端器械模块位于基座的一侧,通过在基座靠近于末端器械模块的一侧设置有第一滑轮组,第一滑轮组上的第一滑轮通过滑轮架安装于基座上,第一滑轮可以对主动牵引绳远离的一端进行导向,以引导主动牵引绳能够汇聚进入于末端器械模块中的器械杆,降低主动牵引绳在牵引过程中力的摩阻力和磨损,使得主动牵引单元与被动牵引单元的力传递更加丝滑可靠。
12、在一些实施例中,牵拉机构的数量设为多组,多组牵拉机构呈扇形等间隔分布于基座。
13、上述技术方案中,通过将牵拉机构的数量设为多组,多组牵拉机构可以共同实现末端器械模块上的多个自由度控制,使得末端器械模块的控制更加精准,转向范围更广。
14、在一些实施例中,牵拉结构还包括中央支柱,中央支柱固定于基座上具有驱动盘的一侧,中央支柱用于对牵拉机构中背离于基座的多根牵引绳进行汇交。
15、上述技术方案中,通过设置有中央支柱,中央支柱对牵拉机构中背离于基座的多根牵引绳进行汇交,起到导向作用,多组牵拉机构中的牵引绳经过中央支柱汇交后一同沿预设方向穿过器械杆进入于末端器械模块内与对应部位连接。
16、在一些实施例中,中央支柱内设置有多组第二滑轮组,多组第二滑轮组在中央支柱内沿轴向和/或轴向间隔分布,多组第二滑轮组共同配合,以用于对牵拉机构中背离于基座的多根牵引绳进行汇交,以引导多根牵引绳沿第一方向连接于末端器械模块的对应部位。
17、上述技术方案中,通过在中央支柱内部设置有多组第二滑轮组,多组第二滑轮组用于对主动牵引绳和第二被动牵引绳远离基座的一端进行汇交并提供引导作用,使得多组牵引机构中对应的主动牵引绳和第二被动牵引绳能够沿预定路线进行走线后连接于末端器械模块的对应部位,降低出现线路错乱的概率,并且第二滑轮组可以对主动牵引绳和第二被动牵引绳进行引导,降低主动牵引绳和第二被动牵引绳在牵引或被牵引过程中力的摩阻力和磨损,使得主动牵引单元与被动牵引单元之间的力传递更加丝滑。
18、在一些实施例中,牵拉结构还包括外壳,外壳罩设于基座,外壳与基座之间可拆卸地连接。
19、上述技术方案中,通过在基座的外侧设置有外壳,外壳可以对基座以及基座上的执行部件起到遮盖作用,确保牵拉机构的整体密闭性和美观性。并且外壳与基座之间可拆卸地连接,这样在对牵拉结构进行装拆时,相对较为方便,也便于后续对牵拉结构中各部位的维护。
20、第二方面,本技术实施例还提供了一种柔性手术机器人,柔性手术机器人包括末端器械模块以及前述的牵拉结构,末端器械模块包括器械杆和末端器械模块,器械杆连接于中央支柱的末端,末端器械模块连接于器械杆的末端,牵引绳穿过器械杆连接于末端器械模块。
21、本技术的其他特征和优点将在随后的具体实施方式部分予以详细说明。
- 还没有人留言评论。精彩留言会获得点赞!