基于深度学习的雷达探测室内人员跌倒的方法
本发明属于功能面料,具体是基于深度学习的雷达探测室内人员跌倒的方法。
背景技术:
1、随着世界人口的不断增长,社会也逐步进入老龄化阶段,日益突出的老龄化问题也引起社会各方面的关注,其中老人日常生活的安全保障问题是近年来备受关注的重点。在众多影响老年人健康安全的各种因素中,跌倒是其中最重要的原因之一,如果在老人身边没有监护人陪护,当其不幸发生意外跌倒且未能及时被发现,将对老人的生命健康带来极大的伤害。因此,在老年人看护监测的研究领域中,跌倒人员的自动检测对于室内护理环境中的老年人来说尤其重要,也为智慧养老提供有效的辅助手段,目前,对于老年人群的人体跌倒监测技术主要包括:
2、第一种、基于图像视频的跌倒检测技术,通过在待检测人员活动的环境中配置摄像头,讲采集到的视频信息转换成连续多帧的图片数据,将图片数据进行处理,对待检测人员目标识别等相关技术训练图像数据,获得识别度较高的模型作为最终的检测模型,将其用于判断新视频是否发生跌倒事件,虽然基于图像视频的跌倒检测技术摒弃了传统的待检测人员需佩戴装置设备进行检测的复杂手段,能实时地对检测范围内的人员活动情况进行监测,同时获得较高的检测结果,但采用摄像头装置设备会对待监测人员的个人隐私造成严重的威胁,同时,摄像设备对环境因素要求较高,需要有光照的支撑。为此,研究人员对该类技术进行了升级,采用深度摄像机获取图像视频数据,造成系统需要处理大量的图像数据,导致计算量过高,不能进行实时跌倒监测。而且,摄像头一般采用固定式安装,不同的摄像头可捕获的环境区域有限,因此需要安装多台摄像头,造成经济成本的提升。
3、第二种、基于传感器的跌倒检测技术,该技术通常是将压力传感器、加速度针等传感器镶嵌在特定的设备内,如智能手机、智能手环等物品里,集成形成专用于手机人体姿态行为信息的设备,利用特定的模型算法对应到相应的跌倒动作特征数据,识别出跌倒行为动作信息,例如,在智能鞋内添加配备压力传感器和加速度计,根据两种传感器过去的数据分析用户的行为动作和脚的运动方向,判定是否发生跌倒行为。其在算法设计上较为简易,不涉及侵犯到待检测人员的隐私问题,但由于这类传感器通常嵌入在物体中,既给人体增加了负重,也需要待检测人员佩戴相关产品,导致人员部分行动受到限制。在对于老年人,尤其是记忆力较弱的老人,时常会忘记穿戴,导致产品的实用性差。同时,传感器的检测检测结果受嵌入在实物体中的位置影响,导致分析的结果不准确,需要不断完善跌倒检测结果。
4、第三种、基于环境特定设备的跌倒检测技术,该技术通过在特定环境中部署安装红外线仪器、压力传感器语音接收器等特定的相关设备,收集人体相关的姿态特征信息,根据特定的算法估计检测跌倒发生事件,在用户隐私上可以达到较好的状态,待检测人员不需要进行佩戴,没有活动受限等相关问题,但其依旧存在许多缺陷,比如安装在环境中的仪器是固定范围内,可获取人员信息的范围较小,若是在大范围空间内,会产生较大的经济成本,同时,在判定该行为事件是否是跌倒发生的界定标准是较难实现的。
5、第四种、基于雷达的跌倒检测技术具有非接触式和不受光线干扰等优点,作为一种小型化、微功率、低成本的设备,跌倒检测雷达的应用前景非常广泛,包括但不限于家庭、养老院合医院等,但是,目前使用雷达进行跌倒检测多普勒特征具有一定局限性,主要体现在以下几个方面:i、分辨率限制,雷达系统的分辨率收到波长和天线尺寸的限制,较长的波长和较小的天线尺寸将限制雷达系统对目标的细节分辨能力,导致无法检测到小尺寸或密集分布的目标;ii、目标速度限制,多普勒雷达通常用于检测目标的速度,但对于高速目标或快速变化的速度,雷达可能无法提供准确的速度测量,使目标速度估计不准确;iii、混叠现象,多普勒雷达还会遇到混叠问题,即当多个目标位于雷达的分辨单元内时,它们的速度信息可能会混合在一起,导致难以区分这些目标的速度;iv、多径效应,雷达信号可能会通过不同的传播路径反射回来,引起多径效应,导致目标的位置和速度信息出现偏差,使得目标位置估计不准确;v、雷达信噪比,低信噪比可能造成虚假的目标检测或无法检测到低反射率的目标;vi、数据处理复杂性,迭代检测多普勒特征需要复杂的数据处理算法和计算能力,因此需要大量的计算资源和时间;vii、目标的非均匀运动,如果目标具有非均匀或复杂的运动模式,例如加速度变化,传统的多普勒雷达可能无法准确估计其运动特性。
技术实现思路
1、针对现有技术存在的不足,本发明的目的是提供基于深度学习的雷达探测室内人员跌倒的方法,能够迅速地检测室内人员的呼吸和细微运动,从而判定室内人员的状态。
2、为了实现上述目的,本发明采用以下技术方案予以实现:
3、基于深度学习的雷达探测室内人员跌倒的方法,包括如下步骤:
4、步骤1、收集不同场景下人和宠物的跌倒姿态的相关数据,构建出跌倒检测的数据集,划分训练集和测试集;
5、步骤2、建立基于深度学习的雷达探测室内人员跌倒的检测模型radarnet,并选择检测模型radarnet的待优化参数;
6、步骤3、利用训练集训练检测模型radarnet,得到检测模型radarnet的最佳参数值;
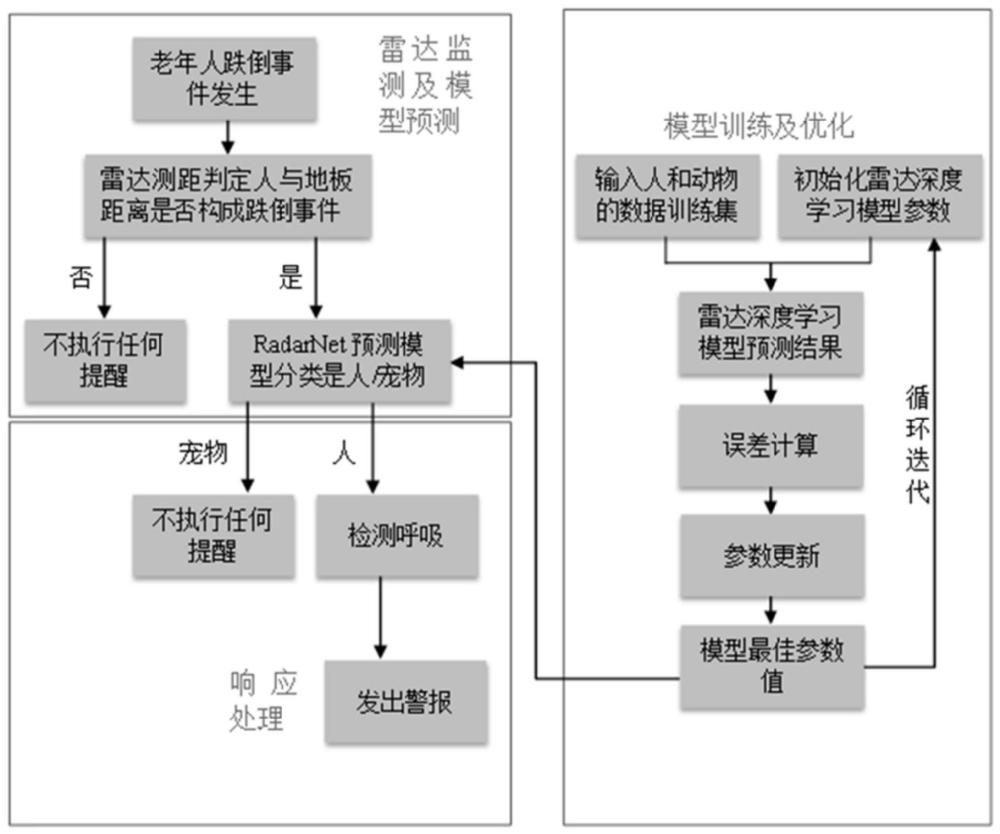
7、步骤4、构建毫米波fmcw雷达系统,通过多普勒特征测距判定跌倒体与地面距离,从而判定跌倒体的行为是否构成跌倒行为;
8、步骤5、毫米波fmcw雷达接收到跌倒信号后,利用训练好的检测模型radarnet分类出触发跌倒行为的跌倒体是人或宠物,如果是人,则检测呼吸和其它细微活动;否则,不执行任何检测;
9、步骤6、训练好的检测模型radarnet的接受端根据判定结果做出相应的响应,选择发出警报或不发出警报。
10、进一步地,所述步骤1的具体过程为:
11、步骤1.1、记录室内环境中来自不同角度的人和宠物的雷达多普勒标签,对比人和宠物走近和远离雷达的周期性的多普勒时间强度dti,分析多普勒雷达返回信号的时间和强度变化,以此分析人和宠物的微小运动;
12、步骤1.2、将记录的雷达多普勒标签数据划分为时长为2s的区域,删除静止状态的数据,得到大小为56*56像素的子图,按照相应的类标签顺序收集子图,得到每个类别有2000个样本的数据集;
13、步骤1.3、复制数据集,采用保留验证和10倍交叉验证处理数据集,将其中一个数据集中的每个类保留30%的数据作为测试集,其余数据作为训练集;将另一个数据集中的子图打乱并划分为10个相等的分区,其中一个分区中的样本作为测试集,其余分区中的样本作为训练集。
14、进一步地,所述步骤1的不同场景下人员跌倒姿态的相关数据包括:视频数据、深度图像数据、多样性场景、多种姿势、年龄组和正常行为数据。
15、进一步地,所述步骤2的检测模型radarnet为包括三个inception模块,且不含全连接层的cnn网络模型,inception模块中间夹有池化层。
16、进一步地,所述步骤2的检测模型radarnet的待优化参数包括卷积层参数、池化层参数、全连接层参数、正则化参数和学习率。
17、进一步地,所述步骤4构建毫米波fmcw雷达系统的过程为:
18、步骤4.1.1、构建毫米波fmcw雷达范围方程rre,表示为:
19、
20、式中,rmax是对检测概率和误报概率的最大检测范围的估计;pavg为连续波雷达的发射功率的均方根;ηant表示天线的总效率;dant是天线的方向性;f0是雷达的工作频率,单位为赫兹;σav为目标的雷达平均横截面,单位为平方米;tint是在雷达的多普勒滤波器处的积分时间,单位为秒;α是由氧、水蒸气等引起的大气衰减系数;k是玻尔兹曼常数;ts表示系统温度,单位开尔文;f是整个接收链的噪声因子;(s/n)1为在加性高斯白噪声中检测正弦波所需的信噪比;lf修正由于目标的雷达横截面波动而造成的损失;ls为系统中的其他损失;c表示光速,c/f0用于计算雷达信号的波长;
21、步骤4.1.2、设定目标物体的雷达横截面σ计算公式为:
22、σ=a×reflectivity×directivity (2)
23、式中,a代表从雷达天线上观察到的目标的横截面积;reflectivity表示被目标pscatter分散的拦截功率pintercepted的比例,directivity表示目标反向散射的功率pbackscatter与假设各向同性散射体反向散射的功率的比值,故,目标物体的雷达横截面σ的计算公式又表示为:
24、
25、简化公式(3),得到公式(4)
26、
27、式中,pi为入射功率密度;
28、步骤4.1.3、先将功率传递到距离目标rr的单位立体角的表面积设定为其中ps为到达接收天线的背向散射波中的单位面积功率,然后利用平面波的平均功率密度与其电场强度e和传播介质的固有阻抗η之间的基本关系式p=(1/2)(|e|2/η),得到雷达散射截面积rcs的表达式为:
29、
30、式中,i和s分别指传输场中目标处的入射场和雷达天线处的散射场,对于传输任意线偏振的情况,散射场用极化基准φ和θ分别表示为:
31、
32、
33、使用基于矩阵法的曲面积分方程求解器wipl-d模拟目标物体的雷达横截面σ。
34、进一步地,所述步骤4通过多普勒特征测距判定人与地面距离的过程为:
35、步骤4.2.1、建立人体躯干多层结构模型,通过计算等效的单一介电体模型的反射系数和体躯干多层结构模型的入射角的反射系数之间的差值,并将差值的均方根误差最小化,得到能够代替人体躯干多层结构模型的最佳单一介电体模型,反射系数的均方根误差表示为:
36、
37、式中,为单一介电体模型的复反射系数,为人体躯干多层结构模型的入射角的反射系数,n为入射角的总数;
38、步骤4.2.2、采用双射线模型计算单一介电体模型与地面距离,在目标处的功率可以表示为:
39、
40、式中,pavg为连续波雷达的发射功率为均方根,λ为自由空间波长,gl=gtd(4πσav/λ2),gr=gti(4πσav/λ2),gtd为直接路径上发射天线总增益,gti是发射天线对反射间接路径的总增益,γte/tm是te的地面反射系数,φ是直接路径与反射路径之间的相位差;
41、步骤4.2.3、采用互易性,雷达的后向散射功率表示为:
42、
43、式中,g′l=grd,表示接收天线在直接路径方向上的总增益;、g′r=gri表示接收天线在反射路径方向上的总增益;
44、步骤4.2.4、雷达的信噪比表示为:
45、
46、进一步地,所述步骤4.1.1中σav为0.7m2,ls为3db。
47、进一步地,所述步骤5利用训练好的检测模型radarnet分类出触发跌倒行为的跌倒体是人或宠物的具体过程为:
48、步骤5.1、定义目标类,将跌倒体分为人和宠物两类;
49、步骤5.2、选择人与宠物的显著差异特征作为增强类可分性的目标特征,检测模型radarnet根据增强类可分性的目标特征对跌倒体进行识别,从而分类是人或宠物。
50、进一步地,所述步骤5.2的增强类可分性的目标特征包括外观特征、运动特征、皮肤纹理和毛发差异;
51、所述外观特征包括身体形状、比例和颜色,运动特征包括运动轨迹、速度和加速度。
52、本发明与现有技术相比,具有如下技术效果:
53、1)本发明将跌倒检测和生命体征监测视为一个问题,将当跌倒行为发生时,人的呼吸引起的雷达回波信号频率会发生多普勒偏移,通过运动目标指示(moving targetindication,mti)滤波器检测和放大多普勒偏移,使跌倒呼吸的回波信号更容易被检测到,进而帮助雷达系统检测和跟踪人的状态,通过实时、持续地监测老年人的呼吸和其他日常生活活动动作,能及时发现老年人是否跌倒,确保了独居老人的居家安全。
54、2)本发明开展人体雷达横截面(radar cross section,rcs)的研究并给出了统计数据的新结果,由于圆偏振雷达使用圆偏振的电磁波来进行探测,人体横截面指的是人体对电磁波的响应,包括对雷达信号的反射、吸收和散射,不同的身体部位和组织对雷达波有不同的反应,这些反应可以用来获取有关人体运动和姿势的信息,圆偏振雷达首先发射圆偏振的电磁波信号,与跌倒人体相互作用,圆偏振雷达接收从人体返回的反射信号,经过信号处理和分析,用于识别人体的状态,通过比较反射信号与已知的人体横截面数据,雷达传感器系统可以检测到如跌倒等异常运动模式,简而言之,本发明通过圆偏振雷达和人体横截面的协同工作,实现有效的跌倒检测,
55、3)、本发明的雷达传感器系统包含了小型的深度学习神经网络模型,神经网络分类器将人与环境的动物区分开,并以良好的精度定位人的位置,呼吸距离定位仅为几厘米,能迅速检测呼吸和其他细微运动,甚至当跌倒的人是静止不动的状态也能检测到细微运动,克服了现有雷达检测多普勒特征时存在的非均匀运动和目标速度难以识别等问题。
56、4)本发明的雷达安装在室内天花板上,不需要佩戴传感或设备,侵入性低,适用于各种人群,可将其用于跌倒或其他活动检测,例如,在日常的家庭护理和安全防护中,实时测家庭成员的活动状况,有助于实现智能居家的愿景。
- 还没有人留言评论。精彩留言会获得点赞!