操作臂以及手术机器人的制作方法
本发明涉及医疗器械,尤其涉及一种操作臂以及手术机器人。
背景技术:
1、微创手术是指利用腹腔镜、胸腔镜等现代医疗器械及相关设备在人体腔体内部施行手术的一种手术方式。相比传统手术方式,微创手术具有创伤小、疼痛轻、恢复快等优势。
2、随着科技的进步,微创手术机器人技术逐渐成熟,并被广泛应用。微创手术机器人通常包括主操作台及从操作设备,主操作台用于根据医生的操作向从操作设备发送控制命令,以控制从操作设备,从操作设备用于响应主操作台发送的控制命令,并进行相应的手术操作。
3、从操作设备通常包括机械臂、设置于机械臂上的动力机构以及操作臂,机械臂用于调节操作臂的位置,操作臂用于伸入体内,并执行手术操作,动力机构用于驱动操作臂的末端器械执行对应的操作。但现有操作臂基于结构限制,通常会发生驱动丝扭曲的现象,导致驱动丝的力损失,进而导致操作精度较低的问题。因此,提高操作臂在手术过程中的操作精度是业界亟待解决的问题。
技术实现思路
1、本发明的主要目的在于提供一种操作臂以及手术机器人,旨在提高操作臂在微创手术过程中的操作精度。
2、为实现上述目的,本发明提供一种操作臂,所述操作臂包括驱动盒、连杆、末端器械以及贯穿所述连杆的驱动丝与末端器械连接的驱动丝,所述驱动盒包括与所述连杆连接的底座、设于所述底座上的驱动轴组件,所述驱动轴组件包括设于所述底座上的第一驱动轴,位于所述第一驱动轴两侧并相对设置的第二驱动轴和第三驱动轴,缠绕于所述第一驱动轴上的缠绕方向相反的第一组驱动丝,缠绕于所述第二驱动轴上的缠绕方向相反的第二组驱动丝以及缠绕于所述第三驱动轴上的缠绕方向相反的第三组驱动丝;
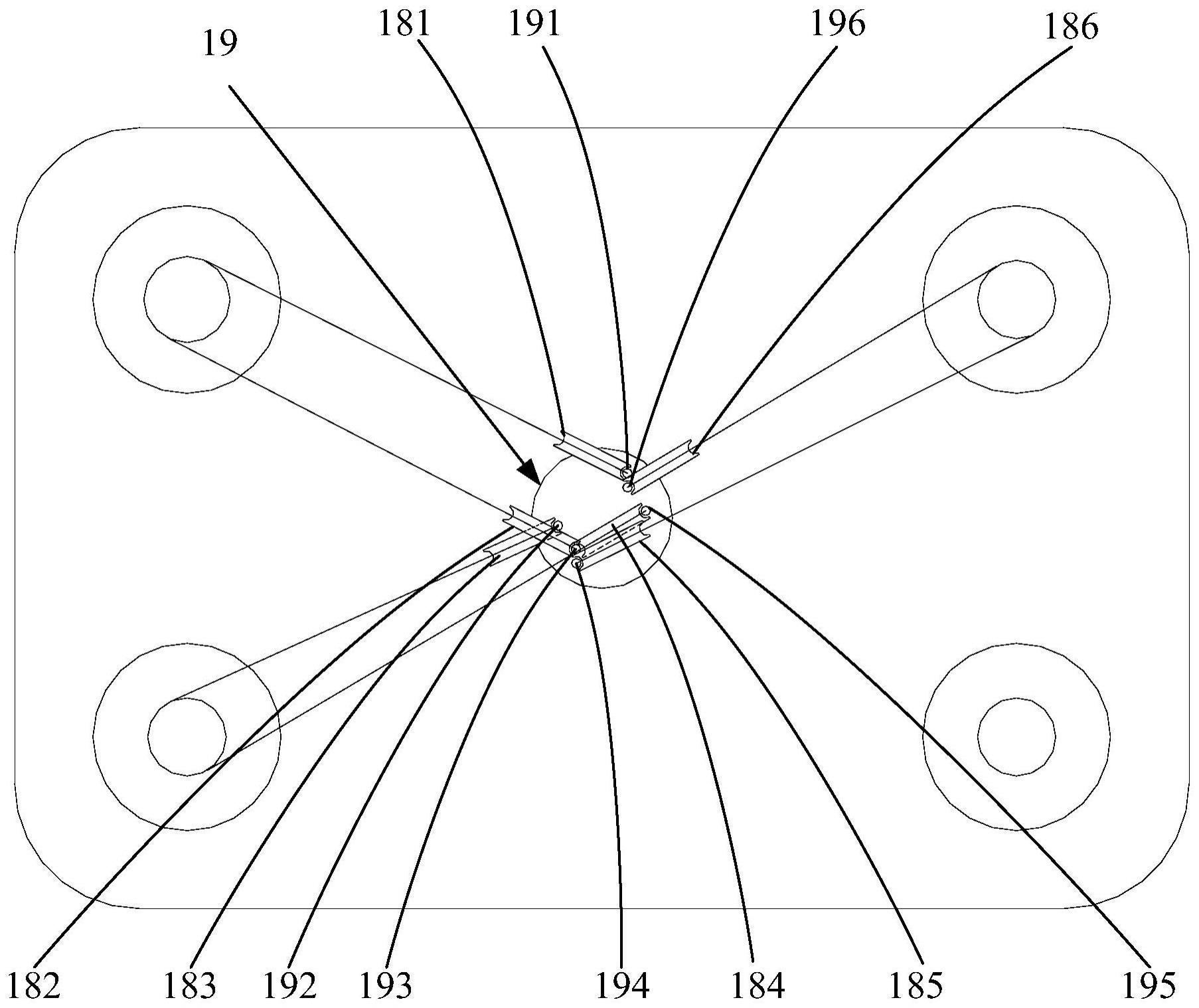
3、所述连杆与所述末端器械的连接处设有一连接盘,所述连接盘上设有靠近所述第三驱动轴一侧的第一通孔、第六通孔以及第五通孔,以及靠近所述第二驱动轴的一侧的第二通孔、第三通孔以及第四通孔,各个通孔被设置为供连接于所述末端器械的各个驱动丝通过并以竖直的方向延伸至所述连杆内。
4、可选地,所述驱动轴组件还包括设于所述底座上的与所述连杆固定连接的从驱动轴,位于所述从驱动轴上方的第一组换向轮、第二组换向轮以及第三组换向轮,所述第一组驱动丝经所述第一组换向轮的换向作用后穿过所述连杆与所述末端器械连接,所述第二组驱动丝经所述第二组换向轮的换向作用后穿过所述连杆与所述末端器械连接,所述第三组驱动丝经所述第三组换向轮的换向作用后穿过所述连杆与所述末端器械连接。
5、可选地,所述第一组换向轮包括用于引导缠绕在所述第一驱动轴上的所述第一组驱动丝进入所述连杆的第一轮和第二轮,所述第二组换向轮包括用于引导缠绕在所述第二驱动轴上的所述第二组驱动丝进入所述连杆的第三轮和第四轮,所述第三组换向轮包括用于引导缠绕在所述第三驱动轴上的所述第三组驱动丝进入所述连杆的第五轮和第六轮。
6、可选地,所述第一组驱动丝分别经所述第一轮换向后进入所述第一通孔、经所述第二轮换向后进入所述第三通孔,所述第二组驱动丝分别经所述第三轮换向后进入所述第二通孔、经所述第四轮换向后进入所述第五通孔,所述第三组驱动丝分别经所述第五轮换向后进入所述第四通孔、经所述第六轮换向后进入所述第六通孔;或
7、所述第一组驱动丝分别经所述第一轮换向后进入所述第五通孔、经所述第二轮换向后进入所述第二通孔,所述第二组驱动丝分别经所述第三轮换向后进入所述第六通孔、经所述第四轮换向后进入所述第四通孔,所述第三组驱动丝分别经所述第五轮换向后进入所述第三通孔、经所述第六轮换向后进入所述第一通孔;或
8、所述第一组驱动丝分别经所述第一轮换向后进入所述第五通孔、经所述第二轮换向后进入所述第二通孔,所述第二组驱动丝分别经所述第三轮换向后进入所述第一通孔、经所述第四轮换向后进入所述第三通孔,所述第三组驱动丝分别经所述第五轮换向后进入所述第四通孔、经所述第六轮换向后进入所述第六通孔;或
9、所述第一组驱动丝分别经所述第一轮换向后进入所述第六通孔、经所述第二轮换向后进入所述第四通孔,所述第二组驱动丝分别经所述第三轮换向后进入所述第一通孔、经所述第四轮换向后进入所述第三通孔,所述第三组驱动丝分别经所述第五轮换向后进入所述第五通孔、经所述第六轮换向后进入所述第二通孔;或
10、所述第一组驱动丝分别经所述第一轮换向后进入所述第一通孔、经所述第二轮换向后进入所述第二通孔,所述第二组驱动丝分别经所述第三轮换向后进入所述第三通孔、经所述第四轮换向后进入所述第四通孔,所述第三组驱动丝分别经所述第五轮换向后进入所述第五通孔、经所述第六轮换向后进入所述第六通孔。
11、可选地,所述第一轮和第二轮与所述末端器械之间的距离不同,所述第三轮和第四轮与所述末端器械之间的距离不同,所述第五轮和第六轮与所述末端器械之间的距离不同。
12、可选地,所述第一组驱动丝在所述第一驱动轴与所述第一组换向轮之间的部分的延伸方向与所述底座平行,所述第二组驱动丝在所述第二驱动轴与所述第二组换向轮之间的延伸方向与所述底座平行,所述第三组驱动丝在所述第三驱动轴与所述第三组换向轮之间的部分的延伸方向与所述底座平行。
13、可选地,所述驱动轴组件还包括设于所述底座上的与所述第一驱动轴相对设置的自转驱动轴,所述自转驱动轴和所述从驱动轴上缠绕有驱动丝组,所述驱动丝组在所述自转驱动轴与所述从驱动轴之间的部分的延伸方向与所述底座平行。
14、可选地,所述第一通孔与所述第四通孔相对所述连接盘的中心设置,所述第二通孔与所述第五通孔相对所述连接盘的中心设置,所述第三通孔与所述第六通孔相对所述连接盘的中心设置。
15、可选地,所述驱动轴组件还包括设于所述底座上的与所述第一驱动轴相对设置的自转驱动轴,所述自转驱动轴、第一驱动轴、第二驱动轴或第三驱动轴包括第二轴体、套设于所述第二轴体上并远离所述底座侧的转动部以及固定于所述第二轴体上并靠近所述底座侧的转盘部;所述转动部包括相对设置的第一转体和第二转体,与所述第一转体固定连接的第一绕线部、以及与所述第二转体固定连接的第二绕线部,所述第一绕线部与所述第二绕线部连接。
16、可选地,所述第一绕线部上设有缠绕有第一缠绕驱动丝的第一绕线槽,所述第二绕线部上设有缠绕有第二缠绕驱动丝的第二绕线槽,所述第一缠绕驱动丝及所述第二缠绕驱动丝属于同一组驱动丝,所述同一组驱动丝为所述驱动丝组、第一组驱动丝、第二组驱动丝及第三组驱动丝其中之一;
17、所述第一转体上设有用于引导所述第一缠绕驱动丝的第三导槽,所述第三导槽的末端向远离所述第一绕线部方向凹设有第三容纳槽,以将所述第一缠绕驱动丝的末端固定于所述第三容纳槽内;所述第二转体上设有用于引导所述第二缠绕驱动丝的第四导槽,所述第四导槽的末端向远离所述第二绕线部方向凹设有第四容纳槽,以将所述第二缠绕驱动丝的末端固定于所述第四容纳槽内。
18、可选地,所述第一转体上设有第一通孔,以供第一螺栓穿过,所述第一转体在背离所述第一绕线部的一侧向所述第一绕线部方向凹设有第一切口,所述第一切口将所述第一通孔分隔为第一孔和第二孔,所述第一螺栓用于在依次穿过所述第一孔、所述第一切口和所述第二孔时,抵触所述第二轴体而将所述第一转体固定于所述第二轴体上;第二转体上设有第二通孔,以供第二螺栓穿过,所述第二转体在背离所述第二绕线部的一侧向所述第二绕线部方向凹设有第二切口,所述第二切口将所述第二通孔分隔为第三孔和第四孔,所述第二螺栓用于在依次穿过所述第三孔、所述第二切口和所述第四孔时,抵触所述第二轴体而将所述第二转体固定于所述第二轴体上。
19、可选地,所述转盘部具有与所述第二轴体固定连接的盘体,所述转盘部包括自所述盘体向远离所述第二轴体的中心方向凸设有突起部。
20、可选地,所述转盘部呈齿轮状。
21、可选地,所述驱动轴组件还包括设于所述底座上的与所述第一驱动轴相对设置的自转驱动轴,与所述连杆固定连接的从驱动轴,位于所述从驱动轴上方的第一组换向轮、第二组换向轮以及第三组换向轮,所述底座上设有以对角线方向相对设置的第一安装孔和第二安装孔,以对角线方向相对设置的第三安装孔和第四安装孔,以及位于所述底座中心并被所述第一安装孔、第二安装孔、第三安装孔以及第四安装孔围设的第五安装孔;
22、所述驱动盒还包括盖设于所述底座上的壳体,所述壳体包括自所述底座向远离所述末端器械方向延伸的立柱,以及与所述立柱连接并以平行于所述底座的方向延伸的盖体;所述盖体包括与所述第一安装孔位置对应的第一盖体,与所述第二安装孔位置对应的第二盖体,与所述第三安装孔位置对应的第三盖体,与所述第四安装孔位置对应的第四盖体,以及与所述第五安装孔位置对应的第五盖体;
23、所述第一盖体、所述第二盖体、第三盖体、第四盖体以及第五盖体,分别与所述立柱以及所述底座围合形成具有开口的第一容纳空间、第二容纳空间、第三容纳空间、第四容纳空间以及第五容纳空间,所述第一容纳空间用于容纳所述自转驱动轴,所述第二容纳空间用于容纳所述第一驱动轴,所述第三容纳空间用于容纳所述第二驱动轴,所述第四容纳空间用于容纳所述第三驱动轴,所述第五容纳空间用于容纳所述第一组换向轮、第二组换向轮以及第三组换向轮。
24、可选地,所述第五盖体包括位于所述底座与所述第二盖体之间的用于安装所述第一组换向轮的第一安装部,所述第一安装部包括自所述第二盖体向所述底座方向延伸的第一连接件以及自所述第一连接件向所述壳体中心方向延伸的第一安装件,所述第一安装件上设有用于供第一插梢穿过并固定所述第一组换向轮的第一组穿孔;
25、所述第五盖体还包括位于所述底座与所述第三盖体之间的用于安装所述第二组换向轮的第二安装部,所述第二安装部包括自所述第三盖体向所述底座方向延伸的第二连接件以及自所述第二连接件向所述壳体中心方向延伸的第二安装件,所述第二安装件上设有用于供第二插梢穿过并固定所述第二组换向轮的第二组穿孔;
26、所述第五盖体还包括位于所述底座与所述第四盖体之间的用于安装所述第三组换向轮的第三安装部,所述第三安装部包括自所述第四盖体向所述底座方向延伸的第三连接件以及自所述第三连接件向所述壳体中心方向延伸的第三安装件,所述第三安装件上设有用于供第三插梢穿过并固定所述第三组换向轮的第三组穿孔。
27、为实现上述目的,本发明还提供一种手术机器人,所述手术机器人包括如上所述的操作臂。
28、本发明提供的操作臂以及手术机器人,通过在连杆与末端器械的连接处设置连接盘,连接盘上设有靠近第三驱动轴一侧的第一通孔、第六通孔以及第五通孔,以及靠近第二驱动轴的一侧的第二通孔、第三通孔以及第四通孔,各个通孔被设置为供连接于末端器械的各个驱动丝通过并以竖直的方向延伸至所述连杆内。如此,可以避免造成驱动丝的扭曲,降低驱动丝的力损失,进而提高所述操作臂的操作精度。
- 还没有人留言评论。精彩留言会获得点赞!