一种多自由度助眠装置及其精准定位控制方法与流程
本发明涉及助眠装置,具体涉及多自由度助眠装置及其精准定位控制方法。
背景技术:
1、众所周知,随着工作和生活压力的逐步加大,很多人面临难入睡、睡眠浅等睡眠问题,目前市场上常采用ces经颅电刺激和药物等方式解决用户睡眠问题,但这些解决方式在安全、效果和用户使用体验上存在一些问题,目前市面上存在睡眠仪来解决睡眠问题。研究表明对耳穴-迷走神经部位进行刺激有助于解决睡眠问题,而现有的睡眠仪多采用针对该部位的电刺激结构进行工作,同时也存在定位不精准、刺激感明显、安全性差等问题。
技术实现思路
1、本发明所要解决的第一个技术问题是针对上述现有技术提供一种能够自动调整作用位置,提高作用位置的定位精准性的多自由度助眠装置。
2、本发明所要解决的第二个技术问题是针对上述现有技术提供一种前述多自由度助眠装置的精准定位控制方法。
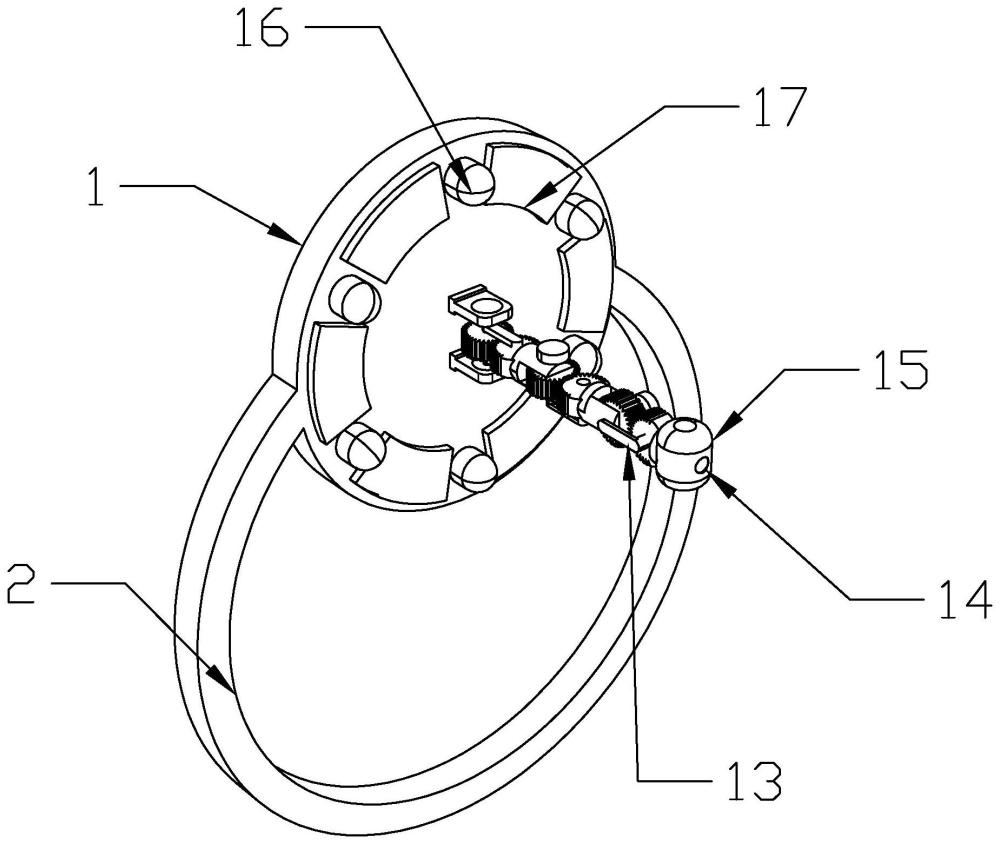
3、本发明解决上述第一个技术问题所采用的技术方案为:一种多自由度助眠装置,包括基座,其特征在于:还包括可多自由度摆动的驱动臂以及刺激头,所述驱动臂的第一端连接在基座上,所述刺激头设置在驱动臂的第二端。
4、结构简单地,所述驱动臂包括用于实现左右摆动驱动的初始驱动组件、用于实现上下摆动驱动的输出组件以及传动连接在初始驱动组件和输出组件之间的至少一组相啮合的延伸驱动组件。
5、优选地,初始驱动组件包括固定架、第一电机和第一主动齿轮,第一电机设置在固定架上,第一主动齿轮转动连接在固定架上且连接在第一电机的驱动端;
6、延伸驱动组件包括非全齿的第一传动齿轮、第二电机、延伸架和第二主动齿轮,
7、其中靠近初始驱动组件的延伸驱动组件的中的第一传动齿轮的一端与第一主动齿轮啮合,第一传动齿轮另一端与延伸架一端连接,延伸架另一端转动设置有第二主动齿轮,延伸架一侧侧壁设置有与第二主动齿轮连接的第二电机,第一传动齿轮通过第一连接杆与固定架铰接,延伸驱动组件之间通过第二连接杆连接,第二连接杆一端与延伸驱动组件的延伸架另一端铰接,第二连接杆另一端与后端驱动组件的第一传动齿轮固定连接;靠近输出组件的延伸驱动组件的中的第二主动齿轮的驱动方向与第一主动齿轮的驱动方向相垂直;
8、输出组件包括非全齿的第二传动齿轮和输出头,第二传动齿轮一端与靠近输出组件的延伸驱动组件中的第二主动齿轮啮合,第二传动齿轮另一端与输出头连接,第二传动齿轮与延伸驱动组件的延伸架通过第三连接杆连接,第三连接杆一端与延伸架铰接,第三连接杆另一端与第二传动齿轮中心铰接;刺激头固定在输出头上。
9、为了方便挂在用户耳朵上使用,所述基座包括基盘和挂耳,所述驱动臂设置在基盘上,所述挂耳连接在基盘的侧壁上。
10、优选地,所述刺激头包括第一灯珠、第一光传感器,所述第一灯珠上开设有通孔,所述第一光传感器嵌设在通孔内。
11、为了能够更准确的确定刺激头的作用位置,所述基座上设置有辅助组件,所述辅助组件包括呈环形交替排列设置在基座上的多个第二灯珠和多个第二光传感器。
12、优选地,所述第一灯珠、第二灯珠采用红外灯珠。
13、优选地,所述刺激头包括第三灯珠、图像识别摄像头,所述第三灯珠上开设有通孔,所述图像识别摄像头嵌设在通孔内。
14、优选地,所述第三灯珠均采用红外灯珠。
15、本发明解决上述第二个技术问题所采用的技术方案为:一种多自由度助眠装置的精准定位控制方法,其特征在于:采用如前述的多自由度助眠装置,通过第一灯珠对作用位置进行光刺激作用,且基于对第一灯珠的光线反射强度检测而控制驱动臂调整刺激头的作用位置;或者
16、采用如前述的多自由度助眠装置,基于图像识别摄像头确定作用位置,进而控制驱动臂调整刺激头的作用位置。
17、优选地,采用如前述的多自由度助眠装置时,多自由度助眠装置的精准定位控制方法包括以下步骤:
18、步骤m1、确定所需刺激的特定位置并设定坐标系位置h;
19、步骤m2、驱动臂驱动刺激头移动,使得第一灯珠移动至特定坐标系位置h;
20、步骤m3、第一灯珠开始工作刺激穴位,初始照射角度a1,初始照射强度b1;
21、步骤m4、第一光传感器采集第一灯珠的光线反射强度c1;
22、步骤m5、根据光线反射强度c1,计算出第一灯珠所照射的局部耳廓区域相对距离e1;
23、步骤m6、第一光传感器采集第一灯珠的光线反射角度d1;
24、步骤m7、根据光线反射角度d1,计算出第一灯珠所照射的局部耳廓区域相对角度f1;
25、步骤m8、系统将刺激距离e1、刺激角度f1与设置的最佳刺激距离e3、最佳刺激角度f3进行实时对比,判断是否一致,若不一致则控制驱动臂驱动刺激头移动,调节刺激头位置,直至距离e1、刺激角度f1与设置的最佳刺激距离e3、最佳刺激角度f3一致;
26、步骤m9、刺激头作用时间t;
27、步骤m10、复位结束。
28、优选地,所述基座上设置有辅助组件,所述辅助组件包括呈环形交替排列设置在基座上的多个第二灯珠和多个第二光传感器;
29、所述步骤m1包括以下步骤:
30、步骤n1、第二灯珠工作照射耳廓;
31、步骤n2、第二灯珠初始照射角度a2,初始照射强度b2;
32、步骤n3、第二光传感器采集第二灯珠的光线反射强度c2;
33、步骤n4、根据光线反射强度c2,计算出第二灯珠所照射的局部耳廓区域相对距离e2;
34、步骤n5、第二光传感器采集第二灯珠的光线反射角度d2;
35、步骤n6、根据光线反射角度d2,计算出该颗第二灯珠所照射的局部耳廓区域相对角度f1;
36、步骤n7、根据所有第二灯珠的反射光线强度c2和反射光线角度d2,计算整个耳廓区域的相对距离e2和相对角度f1;
37、步骤n8、根据初始设定的坐标系计算得出整个耳廓所有区域的结构特征g;
38、步骤n9、根据耳廓结构特征g,判断所需刺激的特定位置并设定坐标系位置h。
39、优选地,采用如前述的多自由度助眠装置时,多自由度助眠装置的精准定位控制方法包括以下步骤:
40、步骤s1、图像识别摄像头采集整个耳廓区域a图像;
41、步骤s2、对整个耳廓区域a图像进行图像处理,进而获取刺激头的作用位置;
42、步骤s3、控制驱动臂驱动刺激头移动至作用位置;
43、步骤s4、控制刺激头开始刺激工作;
44、步骤s5、刺激头作用时间t;
45、步骤s6、复位结束。
46、与现有技术相比,本发明的优点在于:本发明提供了一种多自由度助眠装置及其精准定位控制方法,具备以下有益效果:
47、该多自由度助眠装置能够基于驱动臂实现对刺激头多自由度的驱动,进而方便调整刺激头作用在用户耳朵上的位置,进而能够将刺激头的作用位置调整的更加精准,作用效果更好。
48、多自由度助眠装置的精准定位控制方法,能够智能实现对刺激头作用位置的精准定位。
- 还没有人留言评论。精彩留言会获得点赞!