本发明属于医疗检测,具体涉及双下肢腿围图像智能测量工具。
背景技术:
1、医用成像设备包括x射线设备、超声波设备、磁共振设备等。这些设备主要用于检测和诊断人体内部疾病,如肿瘤、骨折等。医用成像设备的应用可以帮助医生准确诊断疾病和选择最佳的治疗方案。例如,x射线设备可以用于检测骨折和肺部疾病,超声波设备可以用于检测妊娠和心脏病等,为了实现对下肢深静脉血栓和下肢淋巴水肿进行检测,一般是通过判定患者的双下肢之间的周径差,以及持续变化的周径差进行判定的,但是,人工检测存在有误差、操作繁琐等问题,且不能动态监测数据,采用智能化的图像检测设备进行检测,然而市面上各种的双下肢腿围图像智能测量仍存在各种各样的问题
2、如授权公告号为cn116158753a所公开的一种伤口测量系统及方法,其虽然实现了利用相机进行图像的采集,根据所捕获的图像进行测量,提高了测量效率,降低了人工测量对测量结果的影响,提高了测量精度;该伤口测量设备可对物体的几何尺寸、物体之间的间距等不同数据进行测量,无需更换其他测量工具,提高了测量效率;通过识别校准图案得到校准信息,将捕获到的图像与校准信息进行对比,对捕获到的图像进行校准,提高了测量精度,但是并未解决现有智能图像检测存在的,检测方式单一,不能够实现对检测数据信息进行模型计算处理,并且无法实现数据进行计算处理等的问题,
3、及时监测患者双下肢腿围的变化,尽早发现可能出现的下肢静脉血栓,可以及时有效的处理下肢静脉血栓,以免病情进一步恶化。传统测量腿围方法的有诸多不足如定位不一致、测量有测量者的异质性、测量工作量大、人工测量受到场所限制并需要由专业人员完成。
4、为此我们提出双下肢腿围图像智能测量工具。
技术实现思路
1、本发明的目的在于提供双下肢腿围图像智能测量工具,以解决上述背景技术中提出的问题。
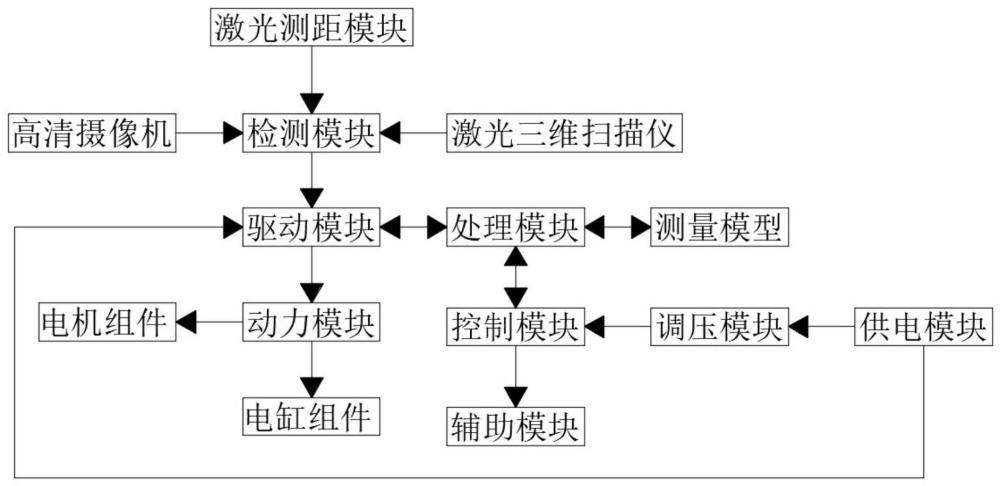
2、为实现上述目的,本发明提供如下技术方案:双下肢腿围图像智能测量工具,包括控制模块,所述控制模块上电性连接有处理模块,所述处理模块上电性连接有驱动模块,所述驱动模块上电性连接有检测模块,所述检测模块中包括有高清摄像机、激光三维扫描仪和激光测距模块,所述处理模块上还电性连接有测量模型,所述测量模型用于在所述检测模块不同距离下,拍摄画面的双下肢腿与照片之间的比列,以及根据照片计算处理拍摄的双下肢腿实际尺寸大小,所述处理模块用于对所述检测模块采集的数据信息或者是所述控制模块需要传输的数据信息进行计算处理,提高数据信息传输的精准度额安全性,所述驱动模块的设定用于对所述检测模块进行驱动控制运行,所述检测模块对双下肢腿进行检测,即通过所述高清摄像机和所述激光三维扫描仪对双下肢腿进行拍摄和扫描识别,所述激光测距模块用于确定双下肢腿拍摄时的距离位置;
3、所述处理模块中包括有图像处理和数据处理,所述图像处理中包括有图像压缩模块、特征识别模块、图像裁剪模块和图像灰度模块,所述图像压缩模块用于实现对识别处理后的图像数据信息进行压缩处理,便于进行传输和提高传输速率,所述特征识别模块用于实现对图像信息进行识别处理,所述特征识别模块包括有纹理特征、形状特征和空间关系特征,所述图像裁剪模块用于实现对图像的大小和边缘进行有效的裁剪切割,所述图像灰度模块用于实现对图像的灰度值进行计算处理;
4、所述纹理特征采用的是灰度共生矩阵进行统计,所述灰度共生矩阵是通过研究灰度的空间相关特性来描述纹理;
5、所述形状特征包括有轮廓特征和区域特征,所述轮廓特征主要针对物体的外边界,所述区域特征则关系到整个形状区域,所述形状特征采用的算法为傅里叶形状描述符法,所述傅里叶形状描述符法是用物体边界的傅里叶变换作为形状描述,利用区域边界的封闭性和周期性;
6、所述特征识别模块中还包括有特征提取,所述特征提取采用的是深度卷积神经网络。
7、优选的,所述测量模型的训练步骤如下:
8、s1、收集大量的数据信息和图像信息进行输入,完成对模型的建立:在进行双下肢腿的测量模型的建立之前,先收集大量的双下肢腿和双下肢腿拍摄距离的数据信息输入到测量模型内,测量模型通过图像识别算法进行计算,建立完整的双下肢腿的测量模型;
9、s2、然后在进行双下肢腿进行拍照和扫描,再将各项参数输入到模型中:对双下肢腿进行拍照和扫描,并且实现距离检测,将照片和数据信息输入到测量模型中,对测量模型的计算结果进行检测;
10、s3、通过激光三维扫描仪采集的数据信息进行补偿修正:在测量模型进行双下肢腿进行计算处理后,再通过激光三维扫描仪采集的数据信息对图像信息进行修正,保持双下肢腿的图像更加的精准;
11、s4、结合图像的计算和设定阈值进行判定:根据测量模型的计算结果,和设定的阈值进行判定,即通过图像识别判断双侧腿围周径是否存在差异,当双下肢周径差大于等于2cm时有临床意义,即患者存在有下肢深静脉血栓,
12、根据图像识别出下肢肢体体积,用于了解患者肢体体积基线数值,定期采用图像智能测量方法监测患者下肢肢体体积,用于早期发现下肢淋巴水肿。
13、优选的,所述灰度共生矩阵即取图像(n×n)中任意一点(x,y)及偏离它的另一点(x+a,y+b),设该点对的灰度值为(g1,g2),令点(x,y)在整个画面上移动,则会得到各种(g1,g2)值,设灰度值的级数为k,则(g1,g2)的组合共有k的平方种;对于整个画面,统计出每一种(g1,g2)值出现的次数,然后排列成一个方阵,再用(g1,g2)出现的总次数将它们归一化为出现的概率p(g1,g2),这样的方阵称为灰度共生矩阵,距离差分值(a,b)取不同的数值组合,得到不同情况下的联合概率矩阵;
14、当a=1,b=0时,像素对是水平的,即0度扫描;当a=0,b=1时,像素对是垂直的,即90度扫描;当a=1,b=1时,像素对是右对角线的,即45度扫描;当a=-1,b=1时,像素对是左对角线,即135度扫描;
15、两个象素灰度级同时发生的概率,就将(x,y)的空间坐标转化为灰度对(g1,g2)的描述,形成了灰度共生矩阵;
16、灰度共生矩阵进行了如下的归一化:
17、
18、优选的,所述图像灰度模块采用图像颜色矩,所述图像颜色矩包括有一阶矩、二阶矩和三阶矩;
19、一阶颜色矩采用一阶原点矩,反映图像的整体明暗程度:
20、
21、二阶颜色矩采用二阶中心距的平方根,反映图像颜色的分布范围:
22、
23、三阶颜色矩采用三阶中心距的立方根,反映图像颜色分布的对称性:
24、
25、其中对于rgb颜色空间的图像,i=1,2,3;ei、δi、si表示第i个通道上的一阶颜色矩,pij表示第j个像素的第i个通道上的颜色值。
26、优选的,所述特征识别模块采用的是深度卷积神经网络进行计算处理,所述深度卷积神经网络的计算公式如下;
27、则输入的图片矩阵以及后面的卷积核,特征图矩阵都是方阵,设输入矩阵大小为w,卷积核大小为k,步幅为s,补零层数为p,则卷积后产生的特征图大小计算公式为:
28、
29、输入公式为:
30、v=cosv2(w,x,"valid")+b,
31、输出公式为:
32、
33、上面的输入输出公式是对每一个卷积层而言的,每一个卷积层都有一个不同的权重矩阵w,并且w,x,y是矩阵形式,对于最后一层全连接层,设为第l层,输出是向量形式的yl,期望输出是d。
34、优选的,所述数据处理中包括有接收单元、滤波单元、解压单元、转换单元和增益单元,所述接收单元用于实现对数据信息进行获取,所述滤波单元用于实现对数据信息进行滤除杂波,所述解压单元用于实现对数据信息进行解压处理,所述转换单元用于实现对图像信息进行模数转换,所述增益单元用于实现对传输的数据信息进行放大处理;
35、所述滤波单元采用的是fir滤波器,所述fir滤波器采用的是有限长单位冲激响应滤波器,一个m阶fir滤波器的定义如下:
36、长度为m的fir输出对应于输入时间序列z(n)的关系由一种有限卷积和的形式给出:
37、
38、上式表达的是一个m-1阶的fir滤波器,它有m个抽头,因此有m个乘法器,m-1个累加器组成,每一个抽头需要消耗逻辑资源的乘法器累加器单元;
39、其中z(n)为输入信号,h(j)为fir滤波系数,v(n)为经过滤波后的信号。
40、优选的,所述驱动模块上电性连接有动力模块,所述动力模块用于对所述检测模块进行驱动调节控制,所述动力模块中包括有电机组件和电缸组件,所述电机组件和所述电缸组件分别设有若干个伺服电机和伺服电缸,所述所述电机组件和所述电缸组件分别用于连接带动所述高清摄像机、所述激光三维扫描仪和所述激光测距模块进行移动和升降调节。
41、优选的,所述控制模块上电性连接有调压模块,所述调压模块上电性连接有供电模块,所述供电模块采用的是市电网,所述调压模块中包括有降压电路、整流电路、稳压电路和滤波电路,所述降压电路用于对所述供电模块的高电压进行转换成低电压,所述整流电路用于将交流电压转换成直流电压,所述稳压电路用于将电压进行稳定的输出,将电压稳定在设定的电压范围内,所述滤波电路用将直流电压中的交流电压进行滤除。
42、优选的,所述供电模块还与所述驱动模块电性连接,所述驱动模块通过所述供电模块向所述检测模块和动力模块进行供电运行,所述激光测距模块还用于实现对所述电机组件和所述电缸组件的运动距离进行检测。
43、优选的,所述控制模块上电性连接有辅助模块,所述辅助模块中包括有用于对数据信息和图像信息进行显示的显示器,包括有用于对系统进行控制调节的键盘和鼠标,包括有用于用于对数据信息进行存储的rom存储器和ram存储器。
44、与现有技术相比,本发明的有益效果是:
45、本发明在使用的时候,通过检测模块中的高清摄像机、激光三维扫描仪对双下肢进行拍摄和扫描,并且搭配激光测距模块对检测模块与双下肢之间的距离进行检测,便于确定检测模块对双下肢检测的距离,在拍摄的图片信息传输给测量模型的时候,能够对拍摄的双下肢图像尺寸和实际尺寸进行比列设定,并且在进行训练的的时候,采集若干数据,便于提高数据的精准度,并且在进行计算处理后,还可以通过激光三维扫描仪进行辅助补偿处理,提高测量模型的计算精准度,并且处理模块内设有图像处理和数据处理,便于对图像信息和数据信息进行处理,提高系统的控制精准度,以及多种算法处理,提高图片在计算周径时候的精准性。