消融效果的评估方法、装置和设备
本技术涉及计算机,具体涉及一种消融效果的评估方法、装置和设备。
背景技术:
1、目前,在针对癌症的非手术的介入性治疗方案中,采用射频消融、冷冻消融和微波消融等超声介入消融治疗方案的临床疗效较好。
2、相关技术中,对消融效果进行评估的方法主要有以下几种:
3、第一种是在术前测量二维超声中病灶的最大径,在术后测量超声中消融灶的最大径,通过比较两个最大径来评估消融是否完成;第二种是在术前采集一个容积超声造影图像,在消融术后采集一个容积超声造影图像,通过图像配准算法或医生交互技术将术前容积图像与术后图像配准进行配准,观察消融灶与肿瘤的覆盖关系,评价消融效果。第三种是在术前采集一个自由臂图像,消融术后采集一个自由臂图像,通过观察术前图像与术后图像的相对位置关系,判断是否消融彻底。
4、但是,第一种方法是基于二维图像进行的,无法显示病灶在超声垂直方向上的消融效果,准确性较低;第二种方法的配准成功与否依赖图像质量,在图像质量较差的情况下,直接影响消融效果;第三种方法需要病人与磁场发射器的位置保持不变,不适用于术中患者位置移动、磁场发射器位置移动、患者术后经过一段时间再复查等场景。
技术实现思路
1、本技术提供一种消融效果的评估方法、装置和设备,可以解决现有技术中存在的在对消融效果进行评估时,存在准确性较低、依赖图像质量、不适用于术中患者位置移动、磁场发射器位置移动、以及术后经过一段时间再复查等场景的技术问题。
2、第一方面,本技术实施例提供一种消融效果的评估方法,包括:
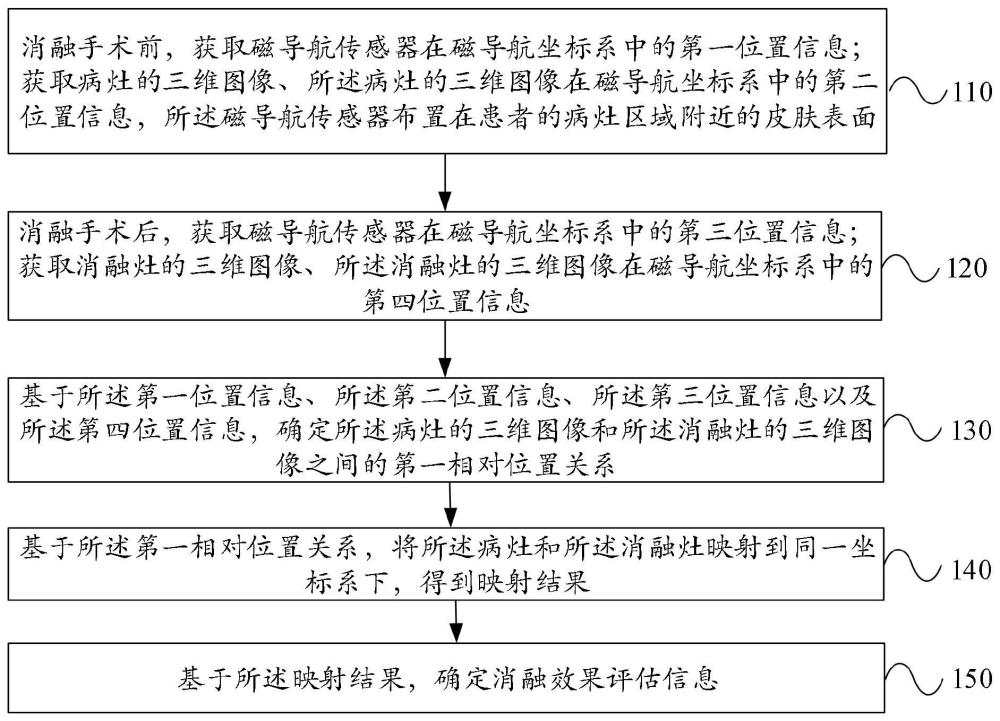
3、消融手术前,获取磁导航传感器在磁导航坐标系中的第一位置信息;获取病灶的三维图像、所述病灶的三维图像在磁导航坐标系中的第二位置信息,所述磁导航传感器布置在患者的病灶区域附近的皮肤表面;
4、消融手术后,获取磁导航传感器在磁导航坐标系中的第三位置信息;获取消融灶的三维图像、所述消融灶的三维图像在磁导航坐标系中的第四位置信息;
5、基于所述第一位置信息、所述第二位置信息、所述第三位置信息以及所述第四位置信息,确定所述病灶的三维图像和所述消融灶的三维图像之间的第一相对位置关系;
6、基于所述第一相对位置关系,将所述病灶和所述消融灶映射到同一坐标系下,得到映射结果;
7、基于所述映射结果,确定消融效果评估信息。
8、在一些实施例中,所述基于所述第一位置信息、所述第二位置信息、所述第三位置信息以及所述第四位置信息,确定所述病灶的三维图像和所述消融灶的三维图像之间的第一相对位置关系,包括:
9、基于所述第一位置信息和所述第二位置信息,确定所述磁导航传感器与所述病灶的三维图像之间的第二相对位置关系;
10、基于所述第三位置信息和所述第四位置信息,确定所述磁导航传感器与所述消融灶的三维图像之间的第三相对位置关系;
11、基于所述第二相对位置关系和所述第三相对位置关系,确定所述病灶的三维图像和所述消融灶的三维图像之间的第一相对位置关系。
12、在一些实施例中,所述基于所述第一位置信息和所述第二位置信息,确定所述磁导航传感器与所述病灶的三维图像之间的第二相对位置关系,包括:
13、基于所述第一位置信息,确定所述磁导航传感器在磁导航坐标系中的第一变换矩阵;
14、基于所述第二位置信息,确定所述病灶的三维图像在磁导航坐标系中的第二变换矩阵;
15、基于所述第一变换矩阵和所述第二变换矩阵,确定所述磁导航传感器与所述病灶的三维图像之间的第二相对位置关系。
16、在一些实施例中,所述基于所述第一变换矩阵和所述第二变换矩阵,确定所述磁导航传感器与所述病灶的三维图像之间的第二相对位置关系,包括:
17、对所述第二变换矩阵求逆矩阵,得到第二逆矩阵;
18、将所述第二逆矩阵与所述第一变换矩阵相乘,得到术前位移矩阵,所述术前位移矩阵用于表示所述磁导航传感器与所述病灶的三维图像之间的第二相对位置关系。
19、在一些实施例中,所述基于所述第三位置信息和所述第四位置信息,确定所述磁导航传感器与所述消融灶的三维图像之间的第三相对位置关系,包括:
20、基于所述第三位置信息,确定所述磁导航传感器在磁导航坐标系中的第三变换矩阵;
21、基于所述第四位置信息,确定所述消融灶的三维图像在磁导航坐标系中的第四变换矩阵;
22、基于所述第三变换矩阵和所述第四变换矩阵,确定所述磁导航传感器与所述消融灶的三维图像之间的第三相对位置关系。
23、在一些实施例中,所述基于所述第二相对位置关系和所述第三相对位置关系,确定所述病灶的三维图像和所述消融灶的三维图像之间的第一相对位置关系,包括:
24、对所述第三相对位置关系对应的矩阵求逆矩阵,得到第三逆矩阵;
25、将所述第三逆矩阵与所述术前位移矩阵相乘,得到目标位移矩阵,目标位移矩阵用于表示所述病灶的三维图像和所述消融灶的三维图像之间的第一相对位置关系。
26、在一些实施例中,所述基于所述第一相对位置关系,将所述病灶和所述消融灶映射到同一坐标系下,得到映射结果,包括:
27、基于所述第一相对位置关系,将病灶的坐标点映射到所述消融灶对应的坐标系下,得到映射后的病灶的坐标点;
28、或
29、基于所述第一相对位置关系,将消融灶坐标点映射到所述病灶对应的坐标系下,得到映射后的消融灶的坐标点。
30、在一些实施例中,所述基于所述映射结果,确定消融效果评估信息,包括:
31、基于所述映射结果中,病灶的坐标点未被所述映射后的消融灶的坐标点覆盖的点的数量,确定消融效果评估信息;
32、或
33、基于所述映射结果中,消融灶的坐标点被所述映射后的病灶的坐标点覆盖的点的数量,确定消融效果评估信息。
34、第二方面,本技术实施例提供了一种消融效果的评估装置,所述消融效果的评估装置包括:
35、第一获取单元,用于在消融手术前,获取磁导航传感器在磁导航坐标系中的第一位置信息;获取病灶的三维图像、所述病灶的三维图像在磁导航坐标系中的第二位置信息,所述磁导航传感器布置在患者的病灶区域附近的皮肤表面;
36、第二获取单元,用于在消融手术后,获取磁导航传感器在磁导航坐标系中的第三位置信息;获取消融灶的三维图像、所述消融灶的三维图像在磁导航坐标系中的第四位置信息;
37、第一确定单元,用于基于所述第一位置信息、所述第二位置信息、所述第三位置信息以及所述第四位置信息,确定所述病灶的三维图像和所述消融灶的三维图像之间的第一相对位置关系;
38、映射单元,用于基于所述第一相对位置关系,将所述病灶和所述消融灶映射到同一坐标系下,得到映射结果;
39、第二确定单元,用于基于所述映射结果,确定消融效果评估信息。
40、第三方面,本技术实施例提供了一种消融效果的评估设备,所述消融效果的评估设备包括处理器、存储器、以及存储在所述存储器上并可被所述处理器执行的消融效果的评估程序,其中所述消融效果的评估程序被所述处理器执行时,实现如上述第一方面任一项所述的消融效果的评估方法的步骤。
41、第四方面,本技术实施例提供了一种计算机可读存储介质,所述计算机可读存储介质上存储有消融效果的评估程序,其中所述消融效果的评估程序被处理器执行时,实现如上述第一方面任一项所述的消融效果的评估方法的步骤。
42、第五方面,本技术实施例提供了一种计算机程序产品,包括计算机程序,所述计算机程序被处理器执行时实现如上述第一方面任一项所述的消融效果的评估方法的步骤。
43、本技术实施例提供的技术方案带来的有益效果包括:
44、通过在消融手术前,获取磁导航传感器在磁导航坐标系中的第一位置信息;以及获取病灶的三维图像、病灶的三维图像在磁导航坐标系中的第二位置信息,磁导航传感器布置在患者的病灶区域附近的皮肤表面;在消融手术后,获取磁导航传感器在磁导航坐标系中的第三位置信息;获取消融灶的三维图像、消融灶的三维图像在磁导航坐标系中的第四位置信息;然后基于第一位置信息、第二位置信息、第三位置信息以及第四位置信息,确定病灶的三维图像和消融灶的三维图像之间的第一相对位置关系;进一步基于第一相对位置关系,将病灶和消融灶映射到同一坐标系下,得到映射结果;从而根据映射结果中病灶和消融灶的覆盖情况,确定消融效果评估信息,本技术不依赖于图像质量,适用于术中、术后场景,能够自动对病灶和消融灶进行配准对位,准确性较高。
- 还没有人留言评论。精彩留言会获得点赞!