一种组合式匀化透镜激光治疗手柄及控制方法与流程
本发明涉及皮肤治疗手柄,特别涉及一种组合式匀化透镜激光治疗手柄及控制方法。
背景技术:
1、在进行皮下穿透治疗的透镜技术,现有常见的技术包括一下:yag激光治疗仪采用衍射光学元件(doe)和微透镜阵列(mla)手柄对激光器输出的光束进行整形,改变光束的能量分布,达到特定的治疗目的。
2、衍射光学透镜(doe)在同等能量条件下穿透皮肤深度较小,微透镜阵列(mla)手柄穿透深度较深,mla目前多用于治疗位于真皮层的深色黄褐斑,而doe用于去除广泛分布在皮肤中的浅色黄褐斑。两个手柄单独应用存在对沉积层次不同的色素皮肤的存在限制。两种手柄配合治疗时,操作者需要频繁更换手柄,过程繁琐,治疗效率低。微透镜阵列(mla)手柄的光束能量分布不均匀,中心点能量很高而边缘能量低。单独应用mla手具覆盖整个皮损,能量设置较高时光斑中心能量较高的区域容易对皮肤造成损伤,能量设置较低光斑周围皮疹治疗不彻底。
3、与doe(180~280μm)相比,mla产生了更深的分布(180~400μm),大小为40μm)。然而,白色皮肤中mla产生的液泡(134μm)(125~700μm)大于134μm)。doe在白皮肤中没有产生激光诱导的空泡化。具有固有的高散射的白色皮肤组织可能导致皮秒激光治疗后更深的空泡化。因此单独应用doe手具在白色皮肤患者面部面年轻化的治疗中通过增加能量密度诱导空泡化的治疗过程中可能会导致深部真皮及以下部分受损。
4、但在进行技术实施的过程中,发现至少存在如下技术问题:
5、目前,现有的技术治疗手段是单一的衍射光学元件(doe)和微透镜阵列(mla)其中的一种,两种手柄配合治疗时,操作者需要频繁更换手柄,过程繁琐,治疗效率低,微透镜阵列(mla)手柄的光束能量分布不均匀,中心点能量很高而边缘能量低,单独应用mla手具覆盖整个皮损,能量设置较高时光斑中心能量较高的区域容易对皮肤造成损伤,能量设置较低光斑周围皮疹治疗不彻底,为此,我们提出一种组合式匀化透镜激光治疗手柄及控制方法。
技术实现思路
1、(一)解决的技术问题
2、针对现有技术的不足,本发明提供了一种组合式匀化透镜激光治疗手柄及控制方法,解决治疗穿透深度和治疗面积平衡的技术问题。
3、(二)技术方案
4、为实现以上目的,本发明通过以下技术方案予以实现:
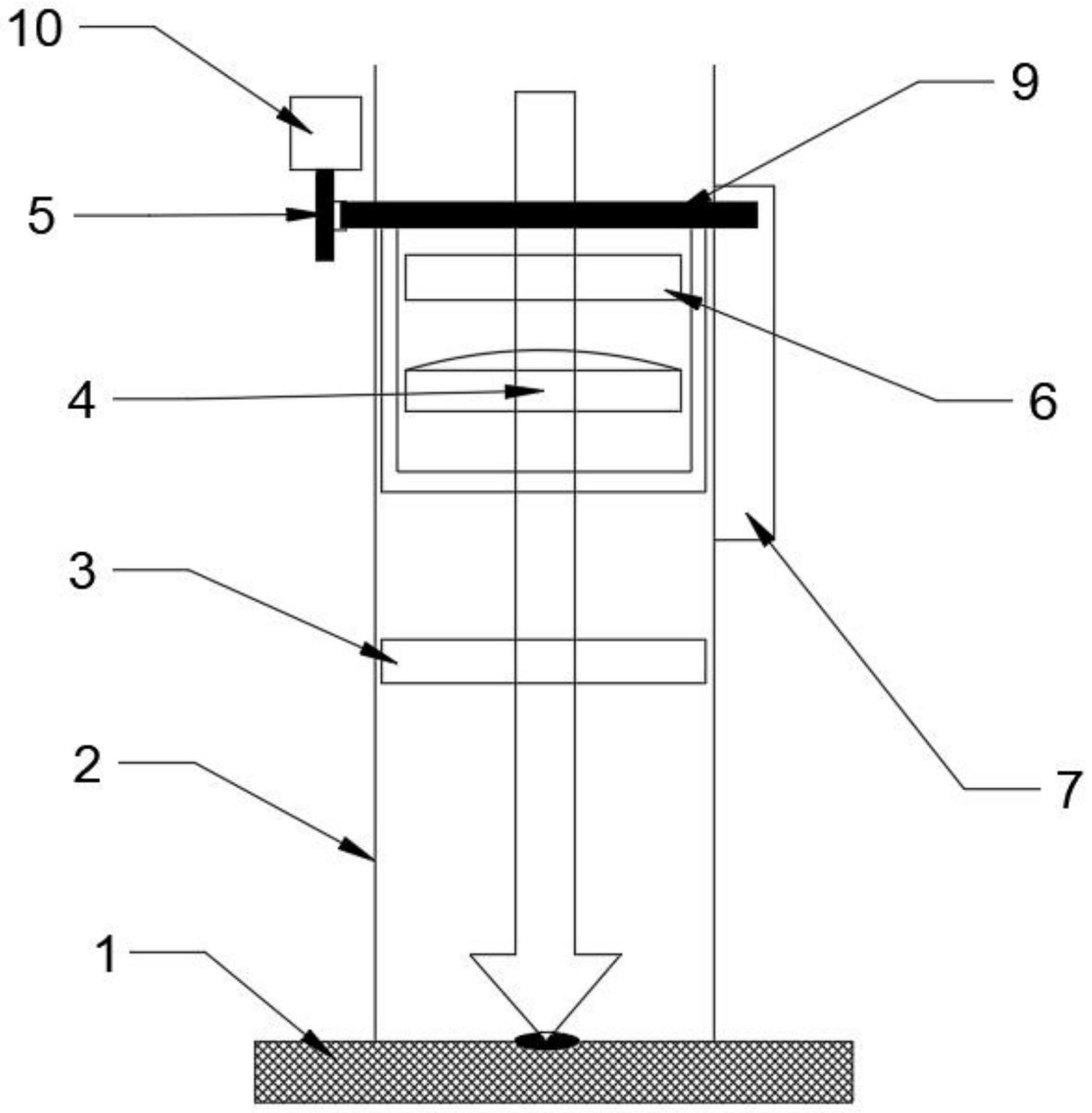
5、一种组合式匀化透镜激光治疗手柄,手柄外壳,
6、doe滑动镜组,设置在手柄外壳内上方,doe滑动镜组内部设置有doe镜片,手柄外壳上方顶部设置有激光发射机构,以及
7、mla镜片,设置在手柄外壳内中部,经过doe镜片衍射的光束经过聚焦后,在光束焦点前的特定的位置,经过mla镜片六边形分布的微透镜整形,将光束能量作用在治疗面上。
8、doe滑动镜组中部设置有平凸聚焦透镜,经过doe镜片的整形后输出的阵列光束,射入平凸聚焦透镜中。
9、手柄外壳内上方外侧设置有滑动槽,对doe滑动镜组的升降进行导向。
10、手柄外壳外侧设置有驱动电机,驱动电机下方设置有连杆,连杆固定安装在doe滑动镜组的一侧边,通过驱动电机的伸缩来带动doe滑动镜组的移动。
11、治疗面右侧设置有doe镜组窗口,doe镜组窗口外侧设置有透明设置有刻度线罩板,doe滑动镜组整体从doe镜组窗口中拆卸出来。
12、一种组合式匀化透镜激光治疗手柄的控制方法,步骤如下:
13、s1通过对治疗面表面的目标靶点扫描覆盖治疗面,图像采集器将识别到的治疗面目标靶点上的治疗目标靶点图像信息传递至视觉处理模块中;
14、s2视觉处理模块按预设程序,来将治疗图片根据靶点坐标和图像进行划分,通过算法计算治疗目标靶点的直径,判断目标靶点的病变类型;
15、s3视觉处理模块将指令发送到电机控制模块来对驱动电机进行驱动,电机控制模块根据预设的治疗方案控制电机旋转指定角度,使输出光束的直径与治疗图片的病变类型相匹配。
16、优选的,所述预设程序的计算逻辑计算步骤如下:
17、1将采集到的治疗面图像按100×100分割成10000个像素点,以x轴和y轴两个维度制成表格,规定每个像素点的坐标(xm,yn),其中m∈(1,100),n∈(1,100);
18、2用以下采集到的数据治疗靶点尺寸的计算方法:
19、2.1按照上表按由左向右,由上向下的顺序,逐个像素读取图像的灰度值,设置灰度值的阈值为p,p设定为50%,当灰度值≥50%时,将该像素点标识值flag(xm,yn)设置为1,当灰度值<50%时,将该像素点标识值flag(xm,yn)设置为0,每行像素点读取完毕时,计算该行像素点标识值之和,计为σn,所有像素点读取完毕时,将像素点标识值之和计为s;
20、2.2记录读取到的首个flag为1的像素点(xi,yj),i∈m,j∈n;
21、2.3读取到的首个σn>0后,按2.1中的顺序继续读取像素点灰度值,直至读取到∑n=0,停止读取像素点;
22、2.4按1中的表格由右向左,由下向上的顺序,逐个像素读取图像的灰度值50%,当灰度值≥50%时,将该像素点标识值flag(xm,yn)设置为1;
23、2.5记录读取到的首个flag=1的坐标(xi’,yj’),i’∈m,j’∈n;
24、2.6计算初始治疗靶点y方向直径
25、2.7计算治疗靶点偏转角
26、2.8分以下情况旋转图像采集器,调整图像偏转角,
27、①当xi≥xi’,逆时针旋转θ角,
28、②当xi<xi’,顺时针旋转θ角,
29、重新采集旋转后的治疗面图像;
30、2.9将所述步骤2.8得到的治疗面图像重复步骤2.1-2.3,
31、2.10比对所有步骤2.9得到的σn的值,其中最大值计为∑max,计算旋转后的治疗面图像的治疗靶点x方向直径d2=∑max,
32、2.11将视觉处理模块目标靶点直径d设置为d1、d2中的较小值。
33、优选的,以下说明判定治疗靶点病变类型的方法:
34、记录所有灰度值≥p像素的灰度值并累加,累积结果计为总灰度值gtotal,计算治疗靶点平均灰度按灰度值对应(雀斑的gavg≤65%,c=0.8,黄褐斑的65%<gavg≤80%,c=1,太田痣的gavg>80%,c=1.2),确定病变类型及gavg确定病变类型及治疗光斑设置系数c。
35、优选的,所述驱动电机控制的方法为
36、1根据视觉处理模块计算的目标靶点直径d和治疗光斑设置系数c,计算光斑设置值f,按下式计算:f=d×c,
37、2滑动槽长度为l,当滑动镜组位于下位时,输出光斑直径为最大fmax;当滑动镜组位于上位时,输出光斑直径为最小fmin,将滑动槽最上方限位设为0位,镜组滑动过程中,光斑大小f与滑动镜组在滑动槽中的位置p呈线性对应关系,可用以下关系式表示:
38、
39、3根据齿轮的固定减速比i,可计算驱动电机旋转圈数r与滑动槽中镜组位置p的对应关系,可用以下关系式表示:r=i×p,
40、4根据以上的对应关系,视觉处理模块向电机驱动模块目标靶点直径d和治疗光斑设置系数c后,电机驱动模块驱动电机转动固定圈数,使滑动镜组移动到匹配对应治疗光斑的位置。
41、(三)有益效果
42、1、采用衍射光学元件(doe)和微透镜阵列(mla)手柄对激光器输出的光束进行整形,改变光束的能量分布,达到特定的治疗目的,本发明输出的治疗激光能量作用于人体皮肤时,穿透深度更深,对真表皮结合处色素疾病有更好的治疗效果;手柄输出的光斑有效覆盖面积大,单次治疗时有效覆盖成片的色斑,避免二次治疗时形成光斑重叠带来副作用。
43、2.本发明的doe镜组可以快速拆卸,针对需要不同穿透深度的治疗,可以切换成mla手柄,本发明输出的阵列光束中单个光斑的尺寸可以按预设的方案自动调节,针对不同面积和不同类型的治疗时可以方便调整,提高治疗效率。
- 还没有人留言评论。精彩留言会获得点赞!