基于惯性和压力信息融合的胸外按压检测装置及方法
本发明涉及医疗设备领域,具体为基于惯性和压力信息融合的胸外按压检测装置及方法。
背景技术:
1、心肺复苏是用于处理心脏骤停和呼吸暂停患者的一项关键医疗技术,是急救中最为基础和重要的措施之一。心肺复苏术涉及三个主要方面,包括胸外按压、体外通气和电除颤。胸外按压在整个心肺复苏过程中具有持续性的重要作用。当心脏停止跳动时,人工体外按压有助于患者建立体外的循环,使得新鲜血液可以运输到大脑,保障大脑血氧指标,从而帮助患者恢复自主循环。因此,胸外按压在心肺复苏中具有至关重要的地位。根据美国心脏协会的指南,对于成年人,规范的胸外按压需要满足以下要求:首先,按压深度应控制在50到60毫米之间,按压频率应在每分钟100到120次之间。其次,在每次按压后,必须确保充分的胸部回弹。此外,施救者需要维持按压和回弹的时间均衡,避免过于强烈的按压。在按压的过程中,手臂应垂直向下施加压力,使其作用于患者的胸骨中线,而不是倾斜,同时还需要避免手肘屈曲或者产生揉捻状或推挤状的按压。这些标准和技巧对于实施高效的心肺复苏至关重要,可以最大程度地提高患者的生存率。
2、不少研究者认识到合理合规的体外按压过程将极大程度上的帮助提高心肺复苏的效果,帮助提高患者的生存率。因此研究并开发胸外按压辅助设备至关重要。
3、专利cn114983794a设计了一种胸外按压辅助设备,其形状为刚性平板结构,内置数据采集单元,但是由于刚性结构的缺陷,需要放置在施救者的手和被救者的胸腔之间使用,严格限制了使用的方式方法。
4、专利cn201520337492.3设计了一种基于加速度计的心肺复苏辅助装置和一种智能终端用于提醒施救者保障正确的心肺复苏操作。但是由于传感数据单一,装置所能做出的监测水平较低,允许阈值较大,这对严格要求的按压标准产生了冲突。
5、专利cn202211729849.3公开了一种用于胸外按压多维度指标合规性检测系统及方法,依靠惯性传感器对按压过程中的深度、频率,错误姿态等信息进行采集和反馈。但由于传感器数据单一,检测的深度和频率受到累计误差影响较大,无法满足高精度的测量需求。
6、因此,为解决现象有的胸外按压辅助设备对胸外按压医疗行为质量监测维度少,检测设备会产生对使用人员的不适和干扰,系统监测精度不够高等情况,本发明设计了一种基于惯性和压力信息融合的心肺复苏胸外按压检测装置及方法,该检测装置不会对使用者造成过多干扰并且监测维度较为丰富,检测精度较高。对帮助提高监测心肺复苏姿态和质量评估具有重要意义。
技术实现思路
1、针对现有的胸外按压辅助设备机械结构复杂,检测精度较低,检测维度少等问题,本发明提出了基于惯性和压力信息融合的胸外按压检测装置及方法,该系统复杂度低,使用方便,穿戴舒适,不会对施救者的触觉产生干扰,使得系统对施救者的施救工作产生的影响尽可能的降低,可以使施救者更方便地寻找施力位置,为施救者提供精度更高、维度更多的胸外按压指标合规性检测辅助系统。
2、为实现上述目的,本发明采取的技术方案是:
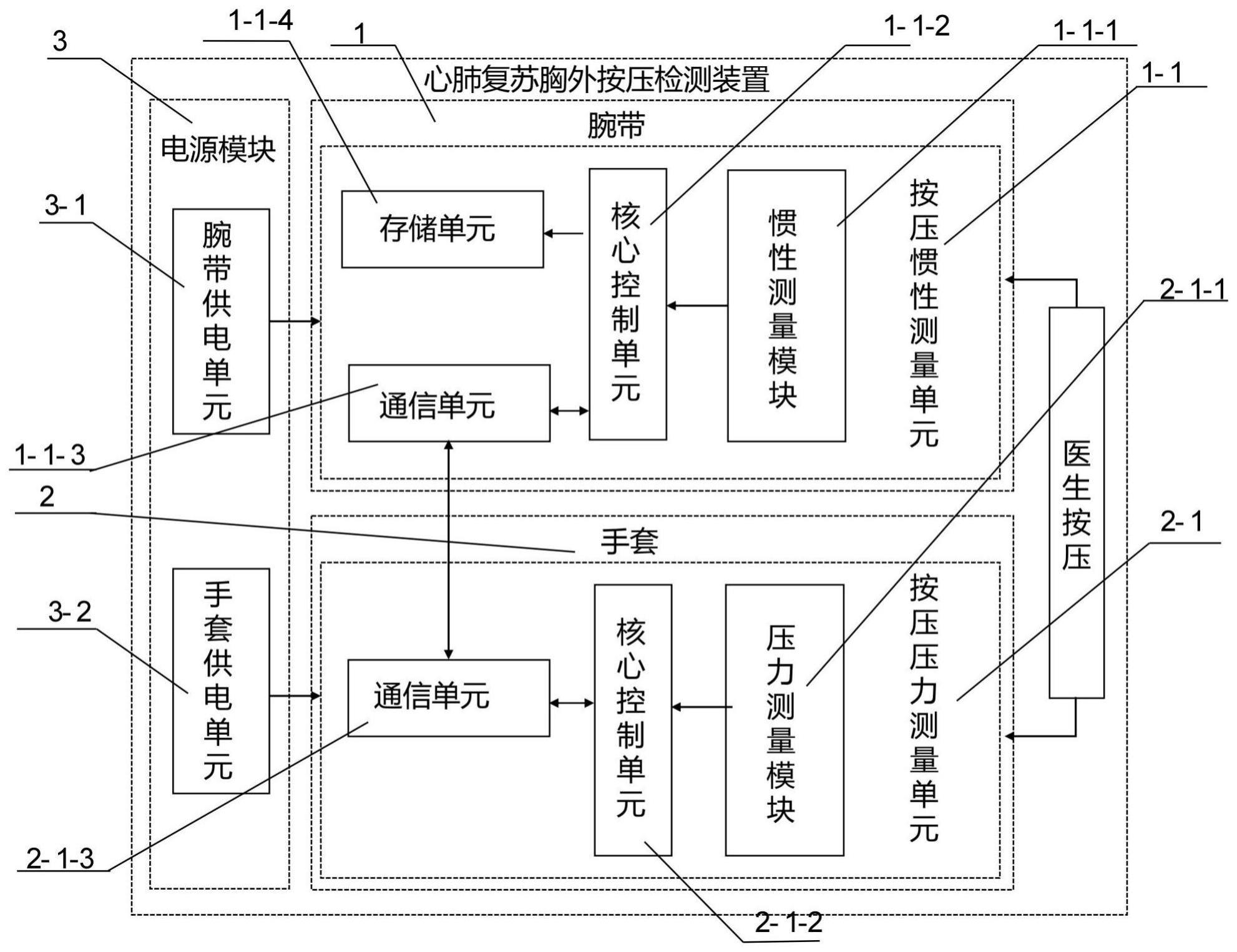
3、基于惯性和压力信息融合的胸外按压检测装置,包括腕带装置、手套装置和电源模块,所述电源模块包括腕带供电单元和手套供电单元,所述腕带供电单元接腕带装置,所述手套供电单元接手套装置;
4、所述腕带装置包括按压惯性测量单元和针织腕带,所述按压惯性测量单元包括惯性测量模块、腕带装置微处理器控制单元、腕带通信模块和存储单元,所述针织腕带固定采集装置于医生的手臂,所述惯性测量模块、腕带装置微处理器控制单元、腕带通信模块和存储单元通过连接线相连,所述惯性测量模块由加速度计,陀螺仪,磁力计构成;
5、所述手套装置包括按压压力测量单元和无指手套基底,所述按压压力测量单元包括压力测量模块,手套装置微处理器控制单元和手套通信模块,所述的手套装置微处理器控制单元与腕带装置微处理器控制单元从属于一个单元模块,所述的按压压力测量单元与无指手套基底通过柔性粘性材料相连接。
6、作为本发明检测装置进一步改进,所述腕带装置还有保护外壳,所述保护外壳和针织腕带柔性连接。
7、作为本发明检测装置进一步改进,所述的、腕带装置微处理器控制单元和手套装置微处理器控制单元采用双核低功耗嵌入式微处理器。
8、作为本发明检测装置进一步改进,所述的按压惯性测量单元由薄膜压力柔性垫和配套的采集放大电路构成,负责采集按压的压力信息。
9、作为本发明检测装置进一步改进,所述的电源模块由微型锂电池,充放电管理模块,电源转换模块电路构成,负责整个节点装置的供电。
10、本发明提供基于惯性和压力信息融合的胸外按压检测装置的检测方法,包括如下步骤:
11、s1:惯性测量单元获取按压过程中的惯性信息,载体坐标系下的加速度,角速度,
12、姿态四元数;
13、s2:利用姿态四元数对获得的载体系下的加速度进行坐标变换得到地理坐标系下的三轴加速度信息,提取垂直分量的加速度信号作为积分的输入信号;
14、s3:对地理坐标系下的加速度信号aiz(t)进行梯形积分,得到带有误差的速度信号v(t);
15、s4:通过压力测量单元得到按压过程中的压力数据f(t);
16、s5:通过巴特沃斯低通滤波器对原始压力数据f(t)进行处理,然后进行中值滤波,得到处理后的最终压力数据f’(t);
17、s6:对处理后的压力数据f’(t)做峰值检测,找到每次胸骨压缩到最大深度时的压力峰值,然后采用双向遍历策略,基于压力大小的变化趋势和斜率的变化特征,进一步识别并提取出压力曲线的每段局部极大值所对应的按压起始时刻tstart和结束时刻tend,将时刻整合为胸骨变形深度最大时的时刻序列{tmaxdepth};
18、s7:将s6得到的时刻序列{tmaxdepth},映射到s3步得到的带有误差的速度信号v(t)上,得到理论上首次到达零速度的特征点集{(tv1,v(tv1))};
19、s8:对s7得到的特征点集的每个相邻的数据点构建线性函数并对于任意一个新的点x进行插值,点(t,v)在点对(ti,vi)和(ti+1,vi+1)之间时,其值v可以参照以下公式计算:
20、
21、对{(tv1,v(tv1))}构成的区间段全部线性插值后得到速度趋势线vtrend;
22、s9:计算v(t)-vtrend,以抑制由于加速度计标定误差和积分常数项导致的发散,得到修正后的速度vtrend;
23、s10:对s9中的修正后的速度vdetrend进行梯形积分得到更准确的胸骨受压形变位移,也就是按压深度数据;
24、s11:提取s6步骤中的按压最大时刻序列{tmaxdepth},选择第n个和第n+a个时间点作为t1和t2,其中n=(i-1)(a+1),a代表间距,i代表组数序列;
25、s12:根据s11中的t1,t2之间的时长,得到按压频率,单位次/分钟:
26、
27、作为本发明检测方法进一步改进,所述的步骤s2利用姿态四元数对获得的载体系下的加速度进行坐标变换的方法如下:对实施采集的加速度,基于姿态四元数,求解坐标变换到地理坐标系下的三轴加速度,基于如下算法:
28、pbody=[0 abx aby abz]t
29、
30、其中abx,aby,abz分别为imu载体坐标系下的三轴加速度,pbody为一个虚四元数,描述载体系下的加速度,q是imu测量得到的地理坐标系下的姿态四元数,pworld是地理坐标系下的加速度四元数,由于其也是一个虚四元数,取其虚部即可得到地理坐标系下的三轴加速度,采用东北天坐标系。
31、作为本发明检测方法进一步改进,所述的s5步骤的巴特沃斯低通滤波器选用六阶,截止频率为20hz的低通滤波器,得到滤波后的信号y(t):
32、y(t)=b(x(t))
33、其中b代表巴特沃斯低通滤波器。滤波器参数的选择既考虑了胸外按压施力标准频率需小于等于2hz的事实,也基于fft对信号频率成分的详细分析,目的是去除噪声和非必要的压力波动;
34、通过中值滤波器来进一步抑制低频波动,增强压力数据的可用性,得到最终的压力信号z(t):
35、z(t)=m(y(t))
36、其中m代表中值滤波器,滤波窗口的大小设定为12。
37、作为本发明检测方法进一步改进,所述的步骤s6的峰值检测方法如下:通过设定最小峰距离dmin,最小峰高度hmin,最小峰突出高度pmin,来准确找到每次胸骨压缩到最大深度时的压力峰值和时间,
38、所述的深度检测的原理基于如下公式:
39、
40、其中a’是减去重力加速度后的偏置,anoise是宽频段的测量噪声,a(t),v(t)和d(t)是理想的由运动引起的加速度、速度和位移。
41、采用本发明的技术方案将有以下有益效果:
42、(1)本发明采用柔性结构设计,解决现有多数设备会影响施救者操作等问题,使得施救者在使用时可以更准确的找准施力点,并且可以更及时地得到按压手感等隐形反馈信息的反馈,提高施救者使用设备和不使用设备的手感相似性,保证尽可能的不会由外因影响而导致的训练效果降低的情况发生。
43、(2)本发明采用惯性和压力信息融合,分析按压动作是否标准规范,提高了检测的精度。
44、(3)穿戴式节点的硬件资源简单小巧,功耗低并且成本低廉,适合大规模适配在医疗训练、医疗教学等场景。
45、(4)本发明亦能够进行事后行为数据的分析,可以识别判断医疗行为中的不足,扩展医疗行为的效果,评估反馈的信息维度。
- 还没有人留言评论。精彩留言会获得点赞!