面向鼻窦的手持式同芯柔性导管机器人
本发明涉及医疗器械,尤其是涉及面向鼻窦的手持式同芯柔性导管机器人。
背景技术:
1、随着科技的发展和医疗水平的进步,医疗机器人辅助单端口手术被认为是微创手术(minimally invasive surgery,mis)的下一步,由于大多数mis在执行过程中工作空间受限,动态环境复杂多变,外科医生知觉丧失导致难以获取触觉反馈信息,传统连续体机器人由于其机械刚性、有限的自由度、难以控制其与身体器官的交互、无法根据任务修改其机械性能。在一些外科手术中,刚性机械臂会对患者的头部或颈部施加大量载荷,可能对患者造成伤害。
2、同心管机器人(ctr)作为兼备较高灵活性和较小尺寸的连续体机器人,在微创医疗体系当中具有广阔的应用前景与实用价值。当前,同心管机器人已经在大脑和颅底外科、眼部和深眼眶介入治疗、胎镜介入、心脏外科、肺介入治疗、前列腺手术等多个领域皆有应用。
3、ctr也称为主动套管机器人,是连续柔性机器人家族中的最小成员之一,由几根互相嵌套的预弯曲管制成,可以各自进行伸长、收缩、旋转运动。其体型很小,通常末端直径只有3~5mm。
4、在众多综合特异性较强的非开放手术环境下,同心管机器人的整体发展逐渐趋向小型化、集成化、去刚性化和多自由度化。在其运动学建模与动态控制的系统设计领域趋于数据驱动,以迭代增强其稳定性;在装置设计上不断优化结构与算法,减小其机械运动的动态误差和装置摩擦所造成的路径偏差。基于同心管机器人的核心机械运作方式,设计出能够适应复杂动态环境,尤其针对大角度弯曲受阻路径的动态调整和柔性处理,在特殊型手术中集成多功能手术器械的同心管手术机器人显得尤其重要。
5、基于颅底外科手术的鼻窦手术的手术复杂弯曲环境,适应其集成内窥镜、手术器械等多样性的手术工具要求,为设计和开发一款融合视觉反馈、球囊扩张、末端执行机构和多精度传感系统的同心管机器人提供了优良的实验平台和实验集成环境。
6、鼻窦炎是一种鼻窦黏膜的炎症。炎症导致鼻涕充满鼻窦腔,然后鼻窦无法正常工作。鼻窦手术的目的是使鼻窦黏膜纤毛引流恢复正常功能,额隐窝气房具有复杂且特殊的解剖结构,这会对患者额窦的引流与换气产生不良影响,在内镜鼻窦手术中也成为疑难解剖部位之一,手术失败率较高。在手术中若鼻窦处不能很好地利用有效空间,容易导致鼻窦引流处出现阻塞。针对鼻窦这一应用场景,同芯导管机器人在治疗其相关病症的研究仍在进行中。我国针对同芯导管机器人的研究较少,更多的是研究鼻窦疾病的最新治疗方案—draf引流。在该手术中,需要使用刚性内窥镜和刚性手术器械通过指定解剖学狭窄部位,从鼻孔到达鼻窦。然而,由于鼻窦复杂的生理结构,经过手术通道仍然十分困难,并且病理组织越远,外科手术的侵入程度会越高,导致开放手术不可避免。后来,由于最开始用于鼻窦手术的内窥镜装置大多是直的,因此上颌窦的前部和底部以及额窦的内部难以检查和治疗,在现有人员描述了鼻窦手术中对可弯曲器械的需求之后,学者们针对柔性内窥镜的研究逐渐兴起。
7、例如现有团队使用弹簧支柱设计的内窥镜,其直径约4mm,弯曲角度达180°。与此同时,国外学者对用于治疗鼻窦手术的柔性机器人展开了大量研究,例如,研究的一种新型上颌窦手术连续体模块,直径为4mm,可以弯曲到270°,以及,设计了可以获取内窥镜图像和执行活检的两个4-dof末端执行器机构,再例如,一种新的可弯曲器械和图像引导的上颌窦手术机器人,其可弯曲末端效应器和导航软件可用于导航和治疗普通窦区域以及上颌窦内的盲区。
8、但是由于鼻窦腔内空间较为狭窄、复杂,现有的手术仪器难以在狭窄、复杂的鼻窦空间内灵活准确地移动到指定位置,手术仪器的弯曲度限制导致窦腔内病变(霉菌团等)无法彻底清除,在鼻窦手术中上颌窦手术失败率仍较高,因此,亟待设计出一种弯道自适应变角度柔性手术器械。
技术实现思路
1、本发明的目的在于克服上述技术不足,提出面向鼻窦的手持式同芯柔性导管机器人,解决现有技术中手术仪器弯曲度限制,难以适应患者的鼻窦腔的技术问题。
2、为达到上述技术目的,本发明的技术方案提供面向鼻窦的手持式同芯柔性导管机器人,包括操作平台、末端执行器以及驱动系统,所述末端执行器包括内管、外管以及内窥镜,所述外管包裹在所述内管的外侧,供所述内管能够相对所述外管沿轴线滑动,所述内管以及所述外管均具有刚性段和柔性段,且所述外管的刚性段连接于所述操作平台,其柔性段一端处设置有以供所述内管的柔性段能够向外伸出的开口,所述内窥镜设置在所述内管的柔性段端部;所述驱动系统通过驱动丝分别连接于所述内管以及所述外管的柔性段端部,供以驱动所述柔性段沿设定方向弯曲设定角度。
3、在一些实施例中,所述内管的柔性段总长度大于所述内管能够伸出的部分长度和所述外管的柔性段长度之和。所述内管以及所述外管均为末端可弯曲的镍钛合金管,镍钛合金管的末端通过切割空隙形成等间距分布的多个柔性关节,供管道沿固定方向弯曲设定角度;且所述镍钛合金管的端部内侧设置有两两对应布置在相对两侧的小孔,用于连接驱动丝。所述内管以及所述外管的内侧壁沿所述驱动丝的引导方向均匀设置有多个卡固片,所述卡固片与所述内管或所述外管的内侧壁之间形成以供驱动丝通过的限位通道。所述内管以及所述外管的可调弯曲范围是0~180°。
4、在一些实施例中,所述操作平台驱动系统包括第一驱动组件以及第二驱动组件,所述内管末端具有四个第一连接孔,四个所述第一连接孔沿所述内管的端面均匀布置,所述第一驱动组件的驱动端通过驱动丝与各个所述第一连接孔连接,以控制内管进行两个自由度的弯曲;所述外管末端具有两个第二连接孔,两个所述第二连接孔相对布置在所述外管的端面,所述第二驱动组件的驱动端通过驱动丝与各个所述第二连接孔连接,以控制外管进行一个自由度的弯曲。所述第一驱动组件和第二驱动组件分别设置四组和两组,并均包括第一丝杆、第一螺母、第一导轨以及第一驱动电机,所述第一丝杆与第一导轨并列设置,所述第一螺母与所述第一丝杆螺纹连接,还与所述第一导轨滑动连接,所述第一驱动电机通过弹性联轴器与所述第一丝杆相连。
5、在一些实施例中,所述操作平台驱动系统还包括周向位移驱动组件,所述周向位移驱动组件的驱动端延伸至所述外管内,并与所述内管相连,以驱动所述内管相对所述外管沿轴线滑动。所述周向位移驱动组件包括第二丝杆、第二螺母、第二导轨以及第二驱动电机,所述第二丝杆与第二导轨并列设置,所述第二螺母与所述第二丝杆螺纹连接,还与所述第二导轨滑动连接,所述第二驱动电机通过弹性联轴器与所述第二丝杆相连。
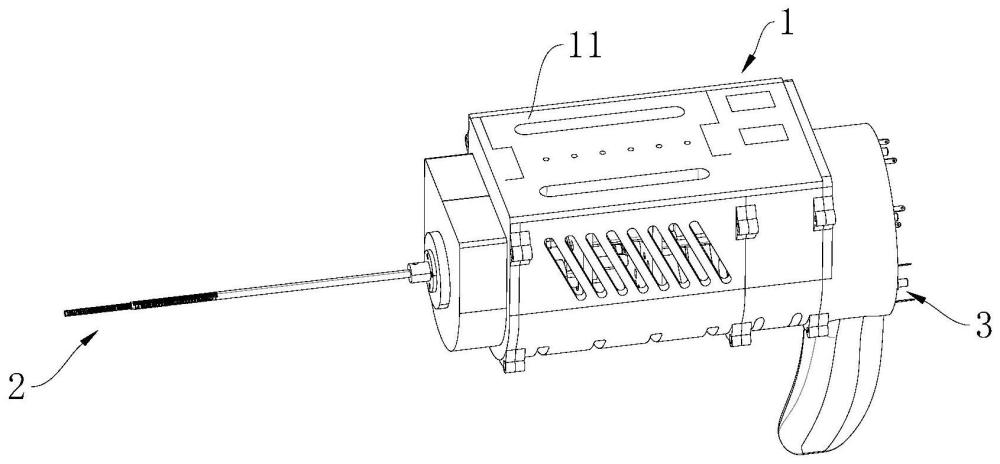
6、在一些实施例中,所述操作平台的一侧面向外侧突出形成一手持部。
7、与现有技术相比,本发明的有益效果包括:在末端执行器设计方面,采用线驱动多段镍钛同芯管的结构设计,其具备高自由度可操控性,极高地提升了手术器械适应鼻窦路径的能力,避免因为角度和限制导致视野和操作局限。
8、设置供以手持的操作平台以及配合设置驱动系统,利用高集成度手持器械实现半自动化控制,可操作性强且定位和控制精准,视觉反馈配合高精度驱动系统与操作平台,能够更好地满足功能需求和手术过程,整体装置轻巧集成,功能与结构兼备。
- 还没有人留言评论。精彩留言会获得点赞!