一种摔倒保护方法、装置、智能假肢、终端及存储介质与流程
本发明涉及假肢,尤其涉及一种摔倒保护方法、装置、智能假肢、终端及存储介质。
背景技术:
1、随着社会的发展,交通的便利,工业化水平的不断提高,机器创伤车祸等造成截肢的患者越来越多,截肢给患者带来很多不便,失去了基本生活能力。因此研发一款能帮助截肢者实现基本生活能力的智能假肢也越来越紧迫。智能假肢需要具有帮助患者行走、跑步等功能,智能假肢要实现行走、跑步等功能,就必须具有识别行走、跑步等不同运动模式的能力。
2、当用户使用智能假肢时,因不适应或者操作不熟练,难免会出现摔倒的情况,但是现有的智能假肢并不会针对摔倒情况作出任何的应急处理,对用户的安全没有保障。
3、因此,现有技术还有待改进和提高。
技术实现思路
1、本发明要解决的技术问题在于,针对现有技术的上述缺陷,提供一种摔倒保护方法、装置、智能假肢、终端及存储介质,旨在解决现有技术中的智能假肢并不会针对摔倒情况作出任何的应急处理,对用户的安全没有保障的问题。
2、为了解决上述技术问题,本发明所采用的技术方案如下:
3、第一方面,本发明提供一种摔倒保护方法,其中,所述摔倒保护方法应用于智能假肢,所述智能假肢包括膝关节以及位于膝关节下方的小腿部,所述小腿部内设置阻尼装置,所述阻尼装置用于对所述膝关节提供弯曲阻力或伸展阻力,所述摔倒保护方法包括:
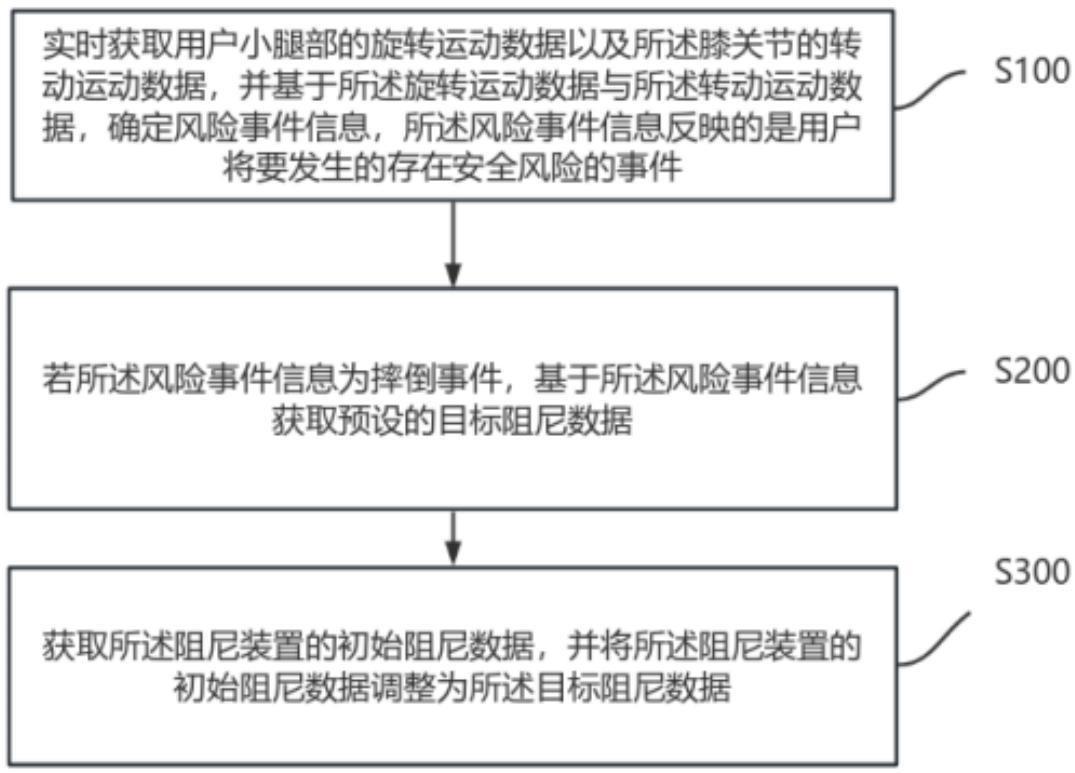
4、实时获取用户小腿部的旋转运动数据以及所述膝关节的转动运动数据,并基于所述旋转运动数据与所述转动运动数据,确定风险事件信息,所述风险事件信息反映的是用户将要发生的存在安全风险的事件;
5、若所述风险事件信息为摔倒事件,基于所述风险事件信息获取预设的目标阻尼数据;
6、获取所述阻尼装置的初始阻尼数据,并将所述阻尼装置的初始阻尼数据调整为所述目标阻尼数据。
7、在一种实现方式中,所述基于所述旋转运动数据与所述转动运动数据,确定风险事件信息,包括:
8、基于所述旋转运动数据与所述转动运动数据,确定用户的身体姿态信息;
9、基于所述身体姿态信息,确定所述风险事件信息。
10、在一种实现方式中,所述基于所述旋转运动数据与所述转动运动数据,确定用户的身体姿态信息,包括:
11、基于所述旋转运动数据确定所述小腿部的旋转加速度,并基于所述转动运动数据确定所述膝关节实时的转动角度;
12、将所述旋转加速度与预设的加速度阈值进行比较,以及,将所述转动角度与预设的角度阈值进行比较;
13、若所述旋转加速度大于所述加速度阈值且所述转动角度大于所述角度阈值,则确定所述身体姿态信息为身体失衡状态。
14、在一种实现方式中,所述基于所述身体姿态信息,确定所述风险事件信息,包括:
15、若所述身体姿态信息为身体失衡状态,则获取用户的身体重心位置的移动距离,所述移动距离用于反映所述身体重心位置的变化;
16、若所述身体重心位置的移动距离超过预设值,则确定所述风险事件信息为摔倒事件。
17、在一种实现方式中,所述将所述阻尼装置的初始阻尼数据调整为所述目标阻尼数据,包括:
18、获取所述身体重心位置的移动速度;
19、基于所述移动速度,确定与所述移动速度所对应的阻尼调整速度,并基于所述阻尼调整速度将所述初始阻尼数据调整至所述目标阻尼数据。
20、在一种实现方式中,所述将所述阻尼装置的初始阻尼数据调整为所述目标阻尼数据,还包括:
21、获取所述初始阻尼数据与所述目标阻尼数据之间的差异值;
22、基于所述差异值,确定与所述差异值所对应的阻尼调整速度,并基于所述阻尼调整速度将所述初始阻尼数据调整至所述目标阻尼数据。
23、在一种实现方式中,所述方法还包括:
24、获取所述风险事件信息所对应的应急等级;
25、基于所述应急等级,控制所述智能假肢中的膝关节的运动速度下降,并向所述智能假肢的膝关节提供弯曲阻力。
26、第二方面,本发明实施例还提供一种摔倒保护装置,其中,所述摔倒保护装置应用于智能假肢,所述智能假肢包括膝关节以及位于膝关节下方的小腿部,所述小腿部内设置阻尼装置,所述阻尼装置用于对所述膝关节提供弯曲阻力或伸展阻力,所述摔倒保护装置包括:
27、风险分析模块,用于实时获取用户小腿部的旋转运动数据以及所述膝关节的转动运动数据,并基于所述旋转运动数据与所述转动运动数据,确定风险事件信息,所述风险事件信息反映的是用户将要发生的存在安全风险的事件;
28、数据获取模块,用于若所述风险事件信息为摔倒事件,基于所述风险事件信息获取预设的目标阻尼数据;
29、阻尼调整模块,用于获取所述阻尼装置的初始阻尼数据,并将所述阻尼装置的初始阻尼数据调整为所述目标阻尼数据。
30、在一种实现方式中,所述风险分析模块包括:
31、姿态确定单元,用于基于所述旋转运动数据与所述转动运动数据,确定用户的身体姿态信息;
32、事件确定单元,用于基于所述身体姿态信息,确定所述风险事件信息。
33、在一种实现方式中,所述姿态确定单元包括:
34、数据分析子单元,用于基于所述旋转运动数据确定所述小腿部的旋转加速度,并基于所述转动运动数据确定所述膝关节实时的转动角度;
35、数据比较子单元,用于将所述旋转加速度与预设的加速度阈值进行比较,以及,将所述转动角度与预设的角度阈值进行比较;
36、姿态分析子单元,用于若所述旋转加速度大于所述加速度阈值且所述转动角度大于所述角度阈值,则确定所述身体姿态信息为身体失衡状态。
37、在一种实现方式中,所述事件确定单元包括:
38、重心位置分析子单元,用于若所述身体姿态信息为身体失衡状态,则获取用户的身体重心位置的移动距离,所述移动距离用于反映所述身体重心位置的变化;
39、摔倒事件确定子单元,用于若所述身体重心位置的移动距离超过预设值,则确定所述风险事件信息为摔倒事件。
40、在一种实现方式中,所述阻尼调整模块还包括:
41、重心移动分析单元,用于获取所述身体重心位置的移动速度;
42、第一调整执行单元,用于基于所述移动速度,确定与所述移动速度所对应的阻尼调整速度,并基于所述阻尼调整速度将所述初始阻尼数据调整至所述目标阻尼数据。
43、在一种实现方式中,所述阻尼调整模块包括:
44、差异值获取单元,用于获取所述初始阻尼数据与所述目标阻尼数据之间的差异值;
45、第二调整执行单元,用于基于所述差异值,确定与所述差异值所对应的阻尼调整速度,并基于所述阻尼调整速度将所述初始阻尼数据调整至所述目标阻尼数据。
46、第三方面,本发明实施例还提供一种智能假肢,其中,所述智能假肢包括接受腔、膝关节、小腿部以及上述方案中所述的摔倒保护装置。
47、第四方面,本发明实施例还提供一种终端,其中,所述终端包括存储器、处理器及存储在存储器中并可在处理器上运行的摔倒保护程序,处理器执行摔倒保护程序时,实现上述方案中任一项的摔倒保护方法的步骤。
48、第五方面,本发明实施例还提供一种计算机可读存储介质,其中,计算机可读存储介质上存储有摔倒保护程序,所述摔倒保护程序被处理器执行时,实现上述方案中任一项所述的摔倒保护方法的步骤。
49、有益效果:与现有技术相比,本发明提供了一种摔倒保护方法,本发明首先实时获取用户小腿部的旋转运动数据以及所述膝关节的转动运动数据,并基于所述旋转运动数据与所述转动运动数据,确定风险事件信息,所述风险事件信息反映的是用户将要发生的存在安全风险的事件。然后,若所述风险事件信息为摔倒事件,基于所述风险事件信息获取预设的目标阻尼数据。最后,获取所述阻尼装置的初始阻尼数据,并将所述阻尼装置的初始阻尼数据调整为所述目标阻尼数据。本发明可在检测到用户将要发生摔倒事件时控制智能假肢中的阻尼装置提供预设的目标阻尼数据,为智能假肢提供适当的弯曲阻力或伸展阻力,对用户的摔倒趋势进行缓冲,减少因摔倒所带来的伤害,保护用户的安全。
- 还没有人留言评论。精彩留言会获得点赞!