术中导航用示踪器安装装置的制作方法
本技术属于医疗器械,具体为术中导航用示踪器安装装置。
背景技术:
1、手术导航系统是以核磁共振、ct等医学影像数据为基础,将病人术前或术中影像数据和手术床上病人解剖结构准确对应,手术中跟踪手术器械并将手术器械的位置在病人影像上以虚拟探针的形式实时更新显示,使医生了解器械相对病人的位置,从而帮助医生了解手术器械的运动路径是否会对人体造成额外损伤,帮助医生确定手术器械已经到达病灶位置,使手术更加的安全、快速,极大的减轻患者手术过程中的痛苦。
2、使用手术导航系统时,需要在病人身上设置示踪器,示踪器帮助手术导航系统建立参考系,从而辅助手术导航系统实时了解病人位置,了解脊柱上骨骼的位置信息,手术导航系统利用参考系计算手术器具与病人骨骼的位置关系,从而帮助医生进行手术。
3、脊柱上端承托颅骨,下联髋骨,中附肋骨,并作为胸廓、腹腔和盆腔的后壁,脊柱具有支持躯干、保护内脏、保护脊髓和进行运动的功能,脊柱为人体的中轴骨骼,是身体的支柱,有负重、减震、保护和运动等功能,虽然在相邻两椎骨间运动范围很小,但多数椎骨间的运动累计在一起,就可进行较大幅度的运动,其运动方式包括屈伸、侧屈、旋转和环转等项,从而脊柱具有灵活的运动功能;脊柱内部自上而下形成一条纵行的脊管,内有脊髓,而脊髓是中枢神经系统的一部分,具有传导和反射的功能,脊柱在人体生命活动中承担着重要功能。
4、在进行手术时,使用骨钉将示踪器固定在脊柱的某些部位的方式不合适,对脊椎的伤害性较大,具有较大的危险性。
5、在手术结束后,需要将手术器具进行全面消毒,以确保手术器械上没有细菌,防止细菌等微生物感染病人,避免病毒的传播,避免引起交叉感染,故需要一种能够稳固地将示踪器固定于脊柱指定位置,并且便于消毒的装置。
技术实现思路
1、为了将示踪器固定于脊柱棘突,保证示踪器固定的稳定性,降低手术后对器具的消毒难度,本技术提供了术中导航用示踪器安装装置。
2、术中导航用示踪器安装装置能固定手术导航系统中的示踪器,其包括:工作导轨和两个夹持臂,示踪器能够与工作导轨连接;两个夹持臂与工作导轨连接,其中一个夹持臂沿工作导轨相对另一个夹持臂做直线运动,以靠近另一个夹持臂,两个夹持臂的共同作用夹持棘突,以将示踪器固定于患者棘突。
3、由于一个夹持臂沿工作导轨相对另一个夹持臂做直线运动,夹持臂与工作导轨之间为面接触,从而夹持臂与工作导轨之间连接的更为稳定,通过工作导轨以及两个与工作导轨连接的夹持臂,以将示踪器固定于棘突上的方式,大大提高了示踪器安装的稳定性,且夹持臂运动过程中,两个夹持臂始终相互平行,从而两个夹持臂在接触棘突时,能够更加容易的保证夹持臂与棘突接触面的大小,从而避免两个夹持臂对棘突造成的局部压力过大,而造成棘突受到伤害的情况发生。工作导轨的存在保证了夹持臂运动路径的固定性,并且操作人员能够更加容易的精细调整夹持臂在工作导轨上的位置,进而保证手术的正常进行。
4、夹持臂与工作导轨滑动连接,通过两个夹持臂与一个工作导轨即可将示踪器固定于棘突,本装置结构简单,从而在对其进行拆卸,进行消毒过程中,节省拆卸时间,大大降低了安装与拆卸难度,从而提高了消毒效率。
5、在本装置使用时,工作导轨的延伸方向朝向脊柱左右两侧的方向,从而节省了沿脊柱方向上的空间,从而给予手术更大的操作空间。可根据临床需要,生产合适厚度的工作导轨和合适长度的夹持臂,以给予手术更大的操作空间。
6、在本技术的一种实施方式中,术中导航用示踪器安装装置还包括螺纹杆,螺纹杆延伸方向与工作导轨的延伸方向相同,螺纹杆的一端与其中一个夹持臂连接,另一端与另一个夹持臂螺纹连接;螺纹杆围绕自身轴线转动时,其中一个夹持臂在螺纹杆带动下沿工作导轨向另一个夹持臂做直线运动,以靠近另一个夹持臂,两个夹持臂的共同作用夹持棘突,以将示踪器固定于患者棘突。
7、本技术通过螺纹杆带动夹持臂的方式,能够利用螺纹精确调整夹持臂对棘突造成的压力,在保证示踪器安装于棘突的稳定性的同时,还能够避免夹持臂对棘突的压力过大,而造成棘突产生损伤的情况发生。
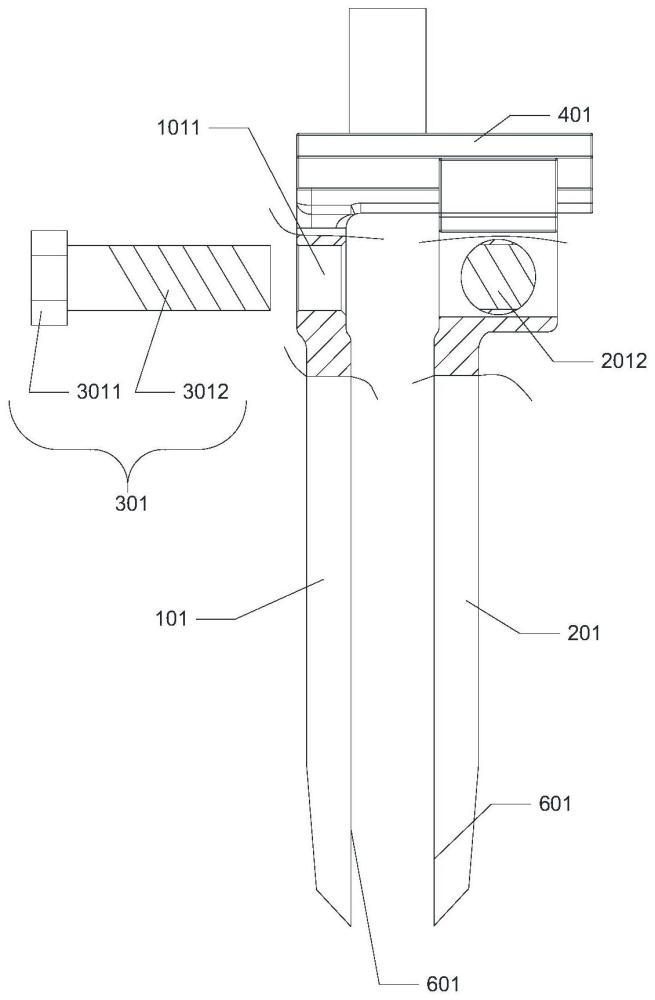
8、在本技术的一种实施方式中,两个夹持臂包括与工作导轨固定连接的第一夹持臂和与工作导轨滑动连接的第二夹持臂;第一夹持臂设有供螺纹杆通过的第一通孔;第二夹持臂设有与螺纹杆螺纹连接的第二螺纹孔;螺纹杆设有膨胀段以及与膨胀段连接的螺纹段,膨胀段直径大于第一通孔直径,螺纹段设有与第二螺纹孔螺纹连接的螺纹,螺纹段的直径不大于第一通孔的直径;螺纹段穿过第一通孔与第二螺纹孔螺纹连接时,膨胀段限制螺纹杆完全穿过第一通孔。
9、通过第一夹持臂与工作导轨固定连接,第二夹持臂与工作导轨滑动连接的的方式,第一夹持臂能够先放置于确定的棘突位置,从而利用螺纹杆调整第二夹持臂在工作导轨上的位置,利用第一夹持臂能够容易的确定本装置的位置。由于第一夹持臂与工作导轨之间是固定连接的,第一夹持臂位置固定,从而医生在调整螺纹杆时,第一夹持臂能够为螺纹杆提供支撑,从而辅助医生调整螺纹杆。
10、在本技术的一种实施方式中,两个夹持臂都与工作导轨滑动连接,两个夹持臂包括第一夹持臂和第二夹持臂;第一夹持臂设有第一螺纹孔,第二夹持臂设有第二螺纹孔,第一螺纹孔与第二螺纹孔的螺纹旋向相反;螺纹杆的一端设有与第一螺纹孔配合的螺纹,另一端设有与第二螺纹孔配合的螺纹,以使螺纹杆围绕自身轴线转动时,螺纹杆通过螺纹带动第一夹持臂、第二夹持臂沿工作导轨运动,以使第一夹持臂与第二夹持臂能够同时相互靠近或者远离。
11、通过第一螺纹孔、第二螺纹孔螺纹旋向相反的方式,螺纹杆围绕自身轴线转动时,螺纹杆能够带动第一夹持臂和第二夹持臂同时沿工作导轨相互接近或者远离,在螺纹杆围绕自身轴线转动一定角度时,第一夹持臂、第二夹持臂沿工作导轨上都会产生相互接近或者远离的位移,和第一夹持臂与工作导轨固定连接,第二夹持臂与工作导轨滑动连接,螺纹杆只带动第二夹持臂产生位移的方式相比较,该方式能够明显加快第一夹持臂、第二夹持臂之间相互接近或者远离的速度;同时,由于第一夹持臂、第二夹持臂都与工作导轨滑动连接,从而能够调整第一夹持臂、第二夹持臂相对工作导轨的位置,进而调整示踪器相对棘突的位置,可根据手术需求调节工作导轨相对第一夹持臂、第二夹持臂的位置,进而调节示踪器的位置,以方便手术的进行。
12、在本技术的一种实施方式中,夹持臂沿工作导轨做直线运动时形成运动平面;两个夹持臂、工作导轨、螺纹杆皆位于运动平面。
13、两个夹持臂、工作导轨、螺纹杆皆位于运动平面内,从而两个夹持臂、工作导轨、螺纹杆形成了平面机构,从而夹持臂沿工作导轨运动时,其运动更为稳定,操作者操作也更加方便。
14、在本技术的一种实施方式中,夹持臂沿工作导轨做直线运动时形成运动平面;两个夹持臂、工作导轨位于运动平面,螺纹杆位于运动平面的一侧。
15、通过螺纹杆位于运动平面的一侧的方式,螺纹杆不在夹持臂的运动路径内,操作者能够在其他空间范围内更加方便的调整螺纹杆。
16、在本技术的一种实施方式中,夹持臂沿工作导轨做直线运动时形成运动平面,夹持臂设有能够与螺纹杆螺纹连接的工作孔;夹持臂包括固定座以及与固定座铰接的铰接轴,铰接轴的轴线与运动平面垂直,工作孔沿铰接轴的径向设置,并贯穿铰接轴;工作孔的轴线能够围绕铰接轴的轴线转动,形成与运动平面平行的工作平面,工作孔的轴线与工作导轨的延伸方向在工作平面上的投影之间的角度能够变化,螺纹杆的一端能够与角度可变的工作孔连接。
17、在通过螺纹杆连接两个夹持臂时,由于加工误差的存在,螺纹杆的一端连接一个夹持臂后,另一端不易连接另一个夹持臂,通过设置的能够围绕自身轴线转动的铰接轴,能够对设在铰接轴侧壁上的工作孔的开口朝向进行调整,从而便于螺纹杆的一端与工作孔连接;同时,螺纹杆在工作孔中卡住时,通过调整工作孔的角度,调整螺纹杆与工作孔的角度,以解除螺纹杆在工作孔中卡住的情况,保证螺纹杆与工作孔的顺利连接。
18、在本技术的一种实施方式中,夹持臂沿工作导轨做直线运动时形成运动平面;夹持臂设有固定座和与运动平面垂直的连接轴;固定座设有固定圆槽,固定圆槽槽壁设有螺纹,连接轴能够与固定圆槽进行螺纹连接,固定圆槽的槽底能够限制连接轴向固定圆槽的槽深方向运动,以使连接轴到达固定圆槽的槽底位置时,连接轴侧壁设有的螺纹孔能够与螺纹杆螺纹连接,使得螺纹杆能够连接所述夹持臂。
19、在本技术的一种实施方式中,夹持臂设有夹持平面,两个夹持臂上的夹持平面相互平行,两个夹持臂夹持棘突时,两个夹持平面接触棘突并夹持棘突。
20、两个夹持臂设有夹持平面,在夹持臂沿工作导轨运动时,两个夹持平面能够始终保证平行,从而保证夹持臂与棘突之间的接触面积,避免夹持臂对棘突造成的局部压力过大而造成棘突发生损伤的情况发生。
21、在本技术的一种实施方式中,夹持臂设有夹持平面,两个夹持臂夹持棘突时,两个夹持平面接触棘突并夹持棘突;夹持平面设有凸起。
- 还没有人留言评论。精彩留言会获得点赞!