一种基于多维数据的溯源仪器及系统的制作方法
本发明涉及数据分析处理,具体涉及一种基于多维数据的溯源仪器及系统。
背景技术:
1、水质波动是指水体在发生异常时,通过仪器快速测量分析,形成波动曲线以突出异常水体数据。在实现水质检测时往往通过多维数据多方面分析,并与数据库中的存储数据进行对比快速筛选出水质污染的原因,并且根据河流沿途水质变化快速锁定污染源头,实现对水质污染原因进行溯源,实现从源头快速解决污染。
2、传统方式进行水质污染溯源时,常常采用比较水质数据与数据库中污染数据的余弦相似性和皮尔逊相似性进行污染溯源,但是水质数据是不断获取的动态数据并且采样时刻由于数据的噪声较大容易对溯源结果造成干扰。虽然灰色关联度分析算法针对动态数据处理具备一定的优势,但是其分辨系数通常采用固定的值,容易造成灰色关联度相近但区分度不足。针对上述问题,本发明结合监测得到的水质数据,改进灰色关联度分析算法的分辨率系数,使其能够更好实现对水质的污染溯源。
技术实现思路
1、为了解决上述技术问题,本发明的目的在于提供一种基于多维数据的溯源仪器及系统,所采用的技术方案具体如下:
2、第一方面,本发明实施例提供了一种基于多维数据的溯源仪器,包括:
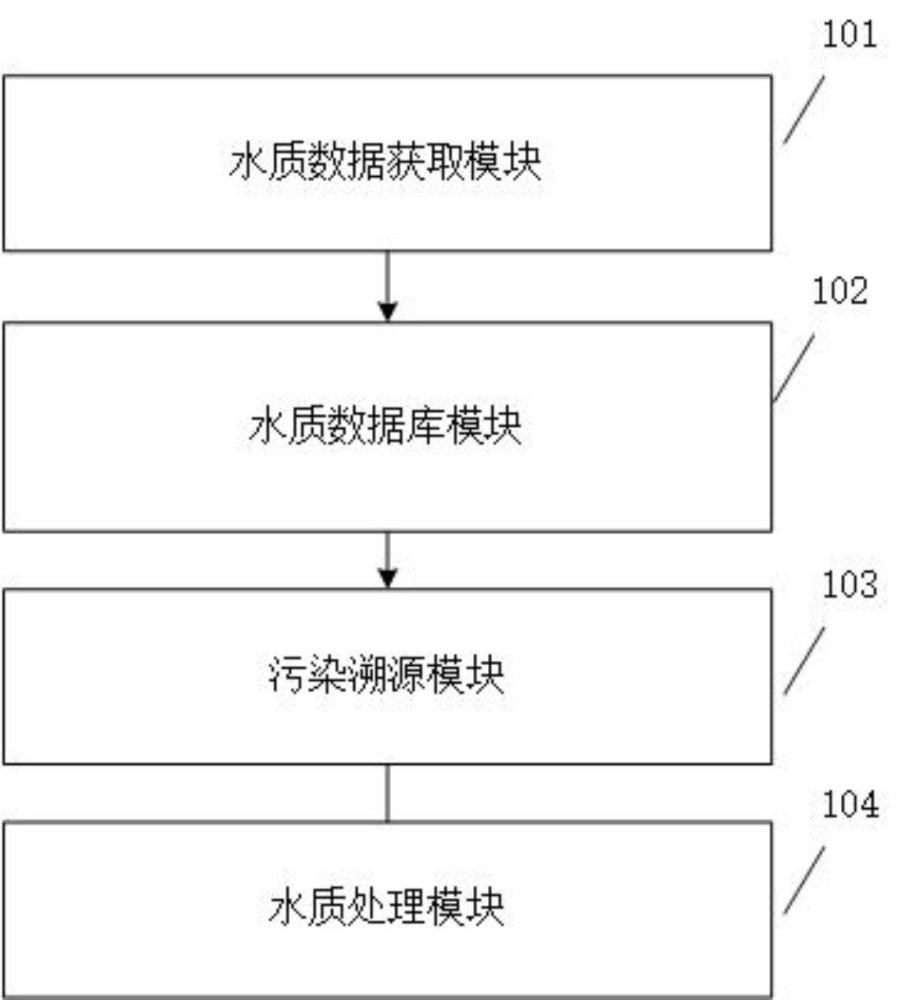
3、水质数据获取模块,利用光谱仪采集各采样时刻水质的光谱信号作为水质监测数据;
4、水质数据库模块,通过对海量污染源进行排查获取水质监测区域的行业污染类别数据库和区域污染路径污染源数据库;
5、污染溯源模块,针对各采样时刻的水质监测数据划分时间窗口;将时间窗口内各采样时刻的水质监测数据均匀划分为各个监测子序列;根据前后相邻采样时刻的水质监测数据得到各监测子序列的状态响应变迁矩阵及监测子序列内各采样时刻的噪声干扰向量;获取时间窗口内各监测子序列的状态变迁差异系数;获取时间窗口内各监测子序列的数据受扰系数;结合各监测子序列的状态变迁差异系数及数据受扰系数得到各监测子序列的变迁受扰因子;结合各监测子序列的状态响应变迁矩阵及变迁受扰因子得到各监测子序列的递变扰动因子;根据各监测子序列的递变扰动因子得到监测子序列所在时间窗口的噪声紊乱系数;根据监测子序列所在时间窗口的噪声紊乱系数得到各时间窗口的分辨率系数;
6、水质处理模块,结合各时间窗口的分辨率系数、灰色关联度分析算法、水质监测区域的行业污染类别数据库和区域污染路径污染源数据库完成基于多维数据的溯源。
7、优选的,所述根据前后相邻采样时刻的水质监测数据得到各监测子序列的状态响应变迁矩阵及监测子序列内各采样时刻的噪声干扰向量,包括:
8、将各采样时刻的水质监测数据作为监测向量,各采样时刻的噪声干扰向量表达式为:
9、式中,和分别表示时间窗口内第m个监测子序列中第i个和i+1个采样时刻得到的监测向量,表示时间窗口内第m个监测子序列的状态响应变迁矩阵,表示时间窗口内第m个监测子序列中第i个采样时刻的噪声干扰向量。
10、优选的,所述获取时间窗口内各监测子序列的状态变迁差异系数,包括:
11、针对各监测子序列,计算状态响应变迁矩阵与单位矩阵的差值,将所述差值的l1范数作为各监测子序列的状态变迁差异系数。
12、优选的,所述获取时间窗口内各监测子序列的数据受扰系数,表达式为:
13、式中,表示第m个监测子序列的数据受扰系数,表示第m个监测子序列中采样时刻的数量,和分别表示时间窗口内第m个监测子序列中第i个和第i+1个采样时刻的监测向量,表示在时间窗口内第m个监测子序列中第i个采样时刻的噪声干扰向量,表示计算向量的余弦相似性。
14、优选的,所述结合各监测子序列的状态变迁差异系数及数据受扰系数得到各监测子序列的变迁受扰因子,包括:
15、计算各监测子序列的状态变迁差异系数与预设第一权重调节因子的乘积,记为第一乘积,计算各监测子序列的数据受扰系数与预设第二权重调节因子的乘积,记为第二乘积,将第一乘积与第二乘积的和值作为各监测子序列的变迁受扰因子。
16、优选的,所述结合各监测子序列的状态响应变迁矩阵及变迁受扰因子得到各监测子序列的递变扰动因子,包括:
17、针对各监测子序列,分别计算与时间窗口内剩余其他监测子序列的状态响应变迁矩阵的差值的f范数,计算所有所述f范数的均值,将所述均值与变迁受扰因子的乘积作为各监测子序列的递变扰动因子。
18、优选的,所述根据各监测子序列的递变扰动因子得到监测子序列所在时间窗口的噪声紊乱系数,包括:
19、将各监测子序列的所有噪声干扰向量按采样时刻顺序依次排列构成噪声干扰矩阵,监测子序列所在时间窗口的噪声紊乱系数的表达式为:
20、式中,表示第个时间窗口的噪声紊乱系数,表示对第个时间窗口内的监测子序列两两组合的排列组合数,和分别表示在时间窗口内第m和第n个监测子序列的噪声干扰矩阵,表示计算矩阵的f范数,表示时间窗口内划分监测子序列的个数。
21、优选的,所述根据监测子序列所在时间窗口的噪声紊乱系数得到各时间窗口的分辨率系数,包括:
22、针对各时间窗口,计算所有监测子序列的递变扰动因子的和值,将噪声紊乱系数与所述和值的比值作为各时间窗口的分辨率系数。
23、优选的,所述结合各时间窗口的分辨率系数、灰色关联度分析算法、水质监测区域的行业污染类别数据库和区域污染路径污染源数据库完成基于多维数据的溯源,包括:
24、将各时间窗口的分辨率系数作为灰色关联度分析算法的分辨率系数,灰色关联度分析算法的输入为时间窗口内各采样时刻的监测向量及行业污染类别数据库中的特征向量,灰色关联度分析算法的输出为各采样时刻的监测向量与所述特征向量的匹配度得分,确定时间窗口的污染类别,根据各时间窗口的污染类别在区域污染路径污染源数据库进行匹配,将匹配到的行业工厂位置作为水质污染源位置。
25、第二方面,本发明实施例还提供了一种基于多维数据的溯源系统,包括存储器、处理器以及存储在所述存储器中并在所述处理器上运行的计算机程序,所述处理器执行所述计算机程序时实现上述任意一项所述一种基于多维数据的溯源仪器。
26、本发明至少具有如下有益效果:
27、本发明通过水质数据获取模块获取水质监测数据,水质数据库模块存储水质监测区域内的污染数据类型,污染溯源模块实现对水质监测数据进行特征提取,具体为:通过状态响应变迁矩阵和噪声干扰向量分析得到变迁受扰因子,通过与时间窗口内剩余其他监测子序列的关系分析得到监测子序列的递变扰动因子,最终结合噪声干扰矩阵得到灰色关联度分析算法的分辨率系数。最后在水质处理模块实现的水质污染溯源;
28、与传统方式相比,本发明根据水质监测数据得到状态响应变迁矩阵和噪声干扰向量,两者能够充分反应水质监测数据的线性和非线性变化,由此通过对二者分析动态调整分辨率系数,使其根据水质的波动变化动态调整分辨率系数大小,提高对水质监测数据分析关联情况的区分度,提高水质污染源的检测效率及准确率,解决了水质监测多维数据关系分析困难,难以充分挖掘多维数据有利信息的问题。
- 还没有人留言评论。精彩留言会获得点赞!