穿刺介入系统和空间注册方法与流程
本技术涉及智能医疗,特别是涉及一种穿刺介入系统和空间注册方法。
背景技术:
1、手术导航定位系统可通过光学跟踪的方式来实现定位,系统中设有配套的光学跟踪装置,该装置中设有反光小球,光学系统通过追踪反光小球来实现对目标的实时跟踪定位,手术导航定位系统在使用之前需要进行手术空间的注册。
2、传统技术中,在软组织穿刺手术机器人中,手术空间的注册是通过对象佩戴呼吸采集装置来记录对象的呼吸运动。为了实现影像空间和手术空间的对应,需要分别在影像和相机空间确定呼吸标记物的位置和姿态。在采集到的影像扫描时刻呼吸相位与相机空间识别的呼吸相位一致时完成手术空间的注册。
3、然而,这样要求相机在整个手术过程中必须保持绝对静止,对于实际手术环境来说要求过于严格。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够解耦对跟踪设备的依赖的穿刺介入系统和空间注册方法。
2、第一方面,本技术提供一种穿刺介入系统,所述系统包括:
3、基准标记物,所述基准标记物的位置不变,基于所述基准标记物得到基准空间;
4、跟踪标记物,所述跟踪标记物固定于对象组织部位;
5、医学成像设备,用于采集所述对象组织部位的医学影像;
6、跟踪设备,用于采集所述基准标记物和所述跟踪标记物的位置;
7、处理器,用于在至少一个呼吸周期内,基于所采集的所述基准标记物和所述跟踪标记物的位置获取基准空间下所述跟踪标记物的目标位置,以及基于所述医学影像确定影像空间下所述跟踪标记物的位置,将对应时刻下所述基准空间下所述跟踪标记物的目标位置,与所述影像空间下所述跟踪标记物的位置进行配准得到对应时刻的配准关系;
8、计算各所述对应时刻的所述配准关系对应的配准误差,并基于对应时刻的所述基准空间下所述跟踪标记物的目标位置,确定所述配准关系对应的呼吸相位;选取配准误差满足要求的所述配准关系对应的呼吸相位作为目标呼吸相位;并基于所述目标呼吸相位进行手术时间提醒;
9、穿刺机械臂,用于在所述手术时间执行穿刺操作。
10、在其中一个实施例中,所述基准标记物安装于手术床上,或所述基准标记物安装于机械臂台车上,或所述基准标记物安装于所述医学成像设备上。
11、在其中一个实施例中,所述跟踪标记物包括至少五个光学标记物或磁导航定位标记物,所述至少五个光学标记物或磁导航定位标记物依次连接形成目标几何形状,且任意两个所述光学标记物或磁导航定位标记物的距离不相同;
12、所述处理器还用于分别识别对应时刻下所述基准空间与所述影像空间的所述跟踪标记物的几何形状;基于所述几何形状,确定所述基准空间的所述跟踪标记物与所述影像空间的所述跟踪标记物的对应关系;基于所述对应关系,对将所述基准空间下所述跟踪标记物的目标位置,与所述影像空间下所述跟踪标记物的位置进行配准得到对应时刻的配准关系。
13、在其中一个实施例中,所述处理器还用于基于所述配准关系将所述基准空间下所述跟踪标记物的目标位置,转换至所述影像空间下,得到参考位置;计算各所述参考位置与所述影像空间下所述跟踪标记物的位置的差值;选取最大差值作为对应时刻下所述配准误差。
14、在其中一个实施例中,所述跟踪标记物与所述基准标记物的结构不同;所述处理器还用于:
15、基于所述所述跟踪标记物与所述基准标记物的结构,判断所述跟踪设备是否采集到所述跟踪标记物以及所述基准标记物的位置;
16、当所述跟踪设备采集到所述跟踪标记物以及所述基准标记物的位置,则基于所述跟踪标记物以及所述基准标记物的位置,确定所述基准空间下所述跟踪标记物的目标位置,并将所述目标位置按照时间顺序放置在历史位置序列;
17、当所述跟踪设备不能采集到所述跟踪标记物以及所述基准标记物的位置,则获取跟踪标记物对应的历史位置序列,所述历史位置序列包括按照时间顺序排列的所述跟踪标记物的位置;
18、基于按照时间顺序排列的所述跟踪标记物的位置,构建当前位置向量以及初始历史位置向量;
19、基于各所述初始历史位置向量与所述当前位置向量的向量距离,从所述初始历史位置向量中选取预设数量的目标历史位置向量;
20、基于所述预设数量的目标历史位置向量,对所述跟踪标记物的位置进行预测得到目标位置。
21、在其中一个实施例中,所述处理器还用于:分别获取各所述初始历史位置向量与所述当前位置向量的向量距离;选取所述向量距离小于距离阈值的初始历史位置向量,并统计所选取的所述初始历史位置向量的数量;当所述数量小于或等于预设数量时,将所选取的所述初始历史位置向量作为目标历史位置向量;当所述数量大于所述预设数量时,按照所述向量距离由小至大的顺序,从所选取的所述初始历史位置向量中,确定所述预设数量的目标历史位置向量;
22、基于各所述目标历史位置向量与所述当前位置向量的向量距离,确定各所述目标历史位置向量的权重;获取各所述目标历史位置向量对应的跟踪标记物历史位置;根据各所述目标历史位置向量对应的所述跟踪标记物历史位置以及所述权重,得到所述跟踪标记物的目标位置。
23、在其中一个实施例中,所述处理器还用于获取序列长度,所述序列长度至少大于一个呼吸周期的长度;当所述历史位置序列的当前长度小于所述序列长度时,将所述基准空间下所述跟踪标记物的位置,按照时间顺序存入所述历史位置序列中;当所述历史位置序列的当前长度大于或等于所述序列长度时,删除所述历史位置序列中时间靠前的所述基准空间下所述跟踪标记物的位置,并将当前的所述基准空间下所述跟踪标记物的位置,按照时间顺序存入所述历史位置序列中。
24、在其中一个实施例中,所述处理器还用于基于所述跟踪标记物的目标位置确定目标质心位置;获取波动范围,并当所述目标质心位置位于所述波动范围时,基于所述波动范围对所述目标质心位置进行归一化处理,得到当前呼吸相位;当所述当前呼吸相位与所述目标呼吸相位匹配时,将所述当前呼吸相位对应的时间作为手术操作执行时间;
25、所述系统还包括:
26、显示模块,用于输出所述手术操作执行时间。
27、在其中一个实施例中,所述处理器还用于将所述目标位置按照时间顺序放置在历史位置序列,基于所述历史位置序列中各所述跟踪标记物的目标位置生成当前呼吸曲线;
28、所述显示模块还用于显示所述当前呼吸曲线,在所述当前呼吸曲线中,输出所述当前呼吸相位对应的时间作为手术操作执行时间的提示。
29、在其中一个实施例中,所述处理器还用于获取系统滞后时间,基于所述系统滞后时间确定预测时间;预测所述预测时间对应的基准空间下跟踪标记物的目标位置。
30、第二方面,本技术还提供一种空间注册方法,所述方法包括:
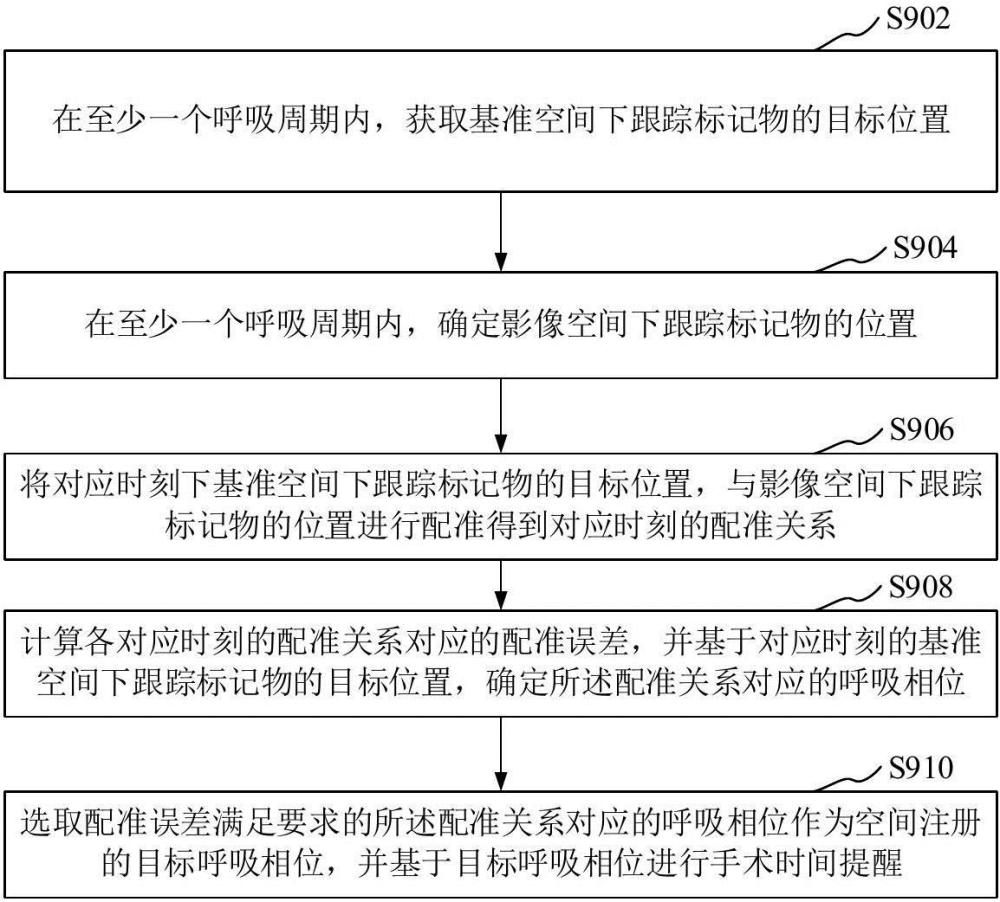
31、在至少一个呼吸周期内,获取基准空间下跟踪标记物的目标位置;
32、在至少一个呼吸周期内,确定影像空间下所述跟踪标记物的位置;
33、将对应时刻下所述基准空间下所述跟踪标记物的目标位置,与所述影像空间下所述跟踪标记物的位置进行配准得到对应时刻的配准关系;
34、计算各所述对应时刻的所述配准关系对应的配准误差,并基于对应时刻的所述基准空间下所述跟踪标记物的目标位置,确定所述配准关系对应的呼吸相位;选取配准误差满足要求的所述配准关系对应的呼吸相位作为空间注册的目标呼吸相位,并基于所述目标呼吸相位进行手术时间提醒。
35、上述穿刺介入系统和空间注册方法,在至少一个呼吸周期内,基于所采集的所述基准标记物和所述跟踪标记物的位置获取基准空间下所述跟踪标记物的目标位置,以及基于所述医学影像确定影像空间下所述跟踪标记物的位置,将对应时刻下所述基准空间下所述跟踪标记物的目标位置,与所述影像空间下所述跟踪标记物的位置进行配准得到对应时刻的配准关系,计算各所述对应时刻的所述配准关系对应的配准误差,并基于对应时刻的所述基准空间下所述跟踪标记物的目标位置,确定所述配准关系对应的呼吸相位;选取配准误差满足要求的所述配准关系对应的呼吸相位作为目标呼吸相位;并基于所述目标呼吸相位进行手术时间提醒,这样基于基准标记物的位置,获取基准空间下所述跟踪标记物的目标位置,采用基准空间替代跟踪设备基准空间,解耦了对跟踪设备位置的依赖,使得跟踪设备位置的灵活性更高。
- 还没有人留言评论。精彩留言会获得点赞!