电极板调节装置及电极丝植入机器人的制作方法
本技术涉及脑机接口领域,尤其涉及脑机接口设备中的电极丝植入机器人,具体涉及一种用于电极丝植入机器人的电极板调节装置及电极丝植入机器人。
背景技术:
1、电极丝是脑机接口设备的核心技术,是连接大脑生物组织的桥梁,是接收和反馈脑电波的通路。在大脑的生物组织中植入电极丝或电极,面临的主要难题在于电极会引发生物组织炎症甚至对生物组织造成损害。电极丝所制造出的电极可以非常小、薄且柔软,最大程度地减少了插入伤口,使目标组织在植入的电极周围生长,改善了电极触点与目标部位之间的距离,并允许更多数量的电极被植入。为了保障生物相容性,电极丝使用的电介质包括聚酰亚胺、环氧、聚对二甲苯、聚对二甲苯和丙烯酸等化学材质。
2、电极丝又软又薄并且需要的数量又多,故而难以通过常规外科手术植入,其成功植入率主要得益于机器人手术系统。机器人每分钟例如可以植入3至6根电极丝,电极数例如多达192个。每根电极丝都能以微米级的精度单独植入脑中,并得以避开表面血管,瞄准特定的脑区。机器人手术系统的视觉定位原理为:使用特定颜色的光(近紫外波长在390纳米至425纳米之间的红光或绿光)照亮机器人末端执行器的金属部分,以更好地对比边缘和特征,并基于目标组织的轮廓图像和电极的位置,引导机器人组件实施手术植入电极。
3、电极丝植入机器人可以用于将电极丝植入脑组织内部。如图1和图2所示,利用电极丝植入机器人向脑组织内部植入电极丝之前,通常先将电极板上的电极丝的一端粘贴在电极丝贴块上,然后将电极板和电极丝贴块同时安装在贴块支架上,电极板和电极丝贴块共用一个支架,所述贴块支架也被称为电极板支架。在人工通过相机观测的辅助下,将钨针穿过电极丝一端的孔内,由钨针带着电极丝植入到脑组织内部。
4、在现有技术中,如图1所示,在xyz空间直角坐标系中,z方向例如对应于连接杆的方向,即竖直方向或垂直方向,它垂直于xy平面,xy平面对应于水平面方向,在一些实施例中xy平面例如对应于脑组织平面。在电极丝植入机器人的一种特定的机位状态下(例如技术人员在靠近钨针一侧面向xz平面时),本领域技术人员例如可以理解的是,z方向对应于上下方向尤其是向上的方向,x方向对应于左右方向尤其是向右的方向,y方向对应于前后方向尤其是向前的方向。在现有技术的实际操作中,人工将电极板和电极丝贴块同时安装在贴块支架上之后,只能通过y轴丝杆(即y向丝杆)在y方向上调节电极丝贴块的位置,使电极丝的端部尽量在相机视野内和钨针的正下方,而不能沿x、z方向调节电极板或电极丝贴块的位置。如果电极丝的丝孔沿x方向不在相机视野中心甚至不在相机视野内,或者电极丝的丝孔不在钨针针尖正下方,则观测和穿孔均极为不便。此时,需要重新调节电极板或电极丝贴块在y方向的位置或重新安装电极丝贴块,然而,这将会严重影响电极丝植入效率。
5、另外,在重新安装完电极板或者由电极板或电极丝铁块组成的单元之后,如果钨针和电极丝的丝孔之间沿z方向的距离过高,则钨针针尖需沿z方向移动一定距离之后才能到达电极丝的丝孔的位置。如果钨针出现倾斜或弯曲的情况,则当钨针针尖沿z方向移动到电极丝的丝孔的位置时,可能出现钨针针尖与电极丝的丝孔的位置偏移的现象,此时需要重新调节电极丝贴块在y方向的位置或重新安装电极丝贴块,这也将会严重影响电极丝植入效率。
技术实现思路
1、为至少在一定程度上克服相关技术中存在的问题,本实用新型提供了一种用于电极丝植入机器人的电极板调节装置及电极丝植入机器人。
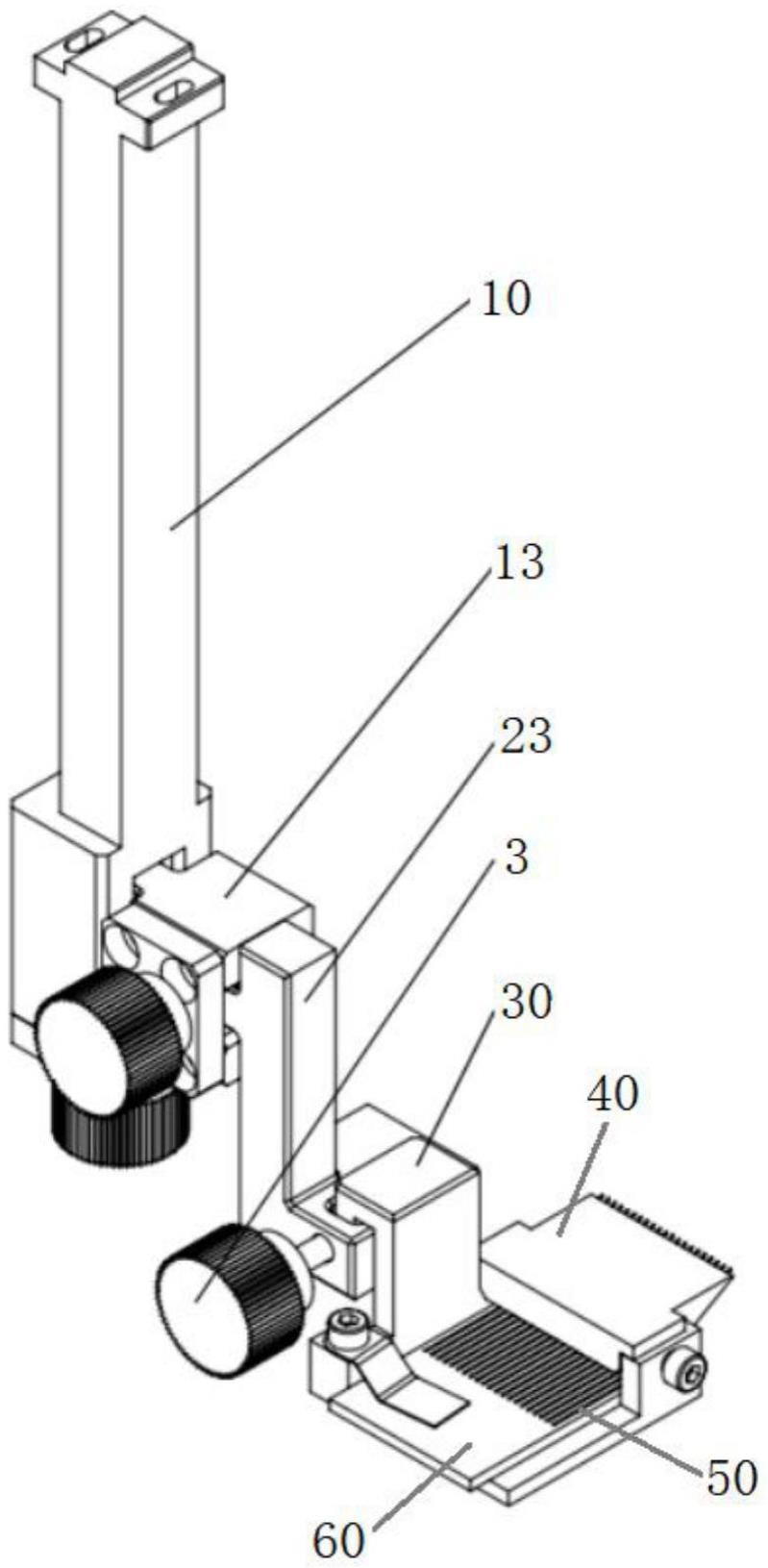
2、根据本实用新型实施例的第一方面,本实用新型提供了一种电极板调节装置,用于电极丝植入机器人中,电极板固定在电极丝植入机器人的电极板支架上,所述电极板调节装置包括z向调节机构和x向调节机构,分别用于调节所述电极板在z向和x向上的位置,其中,所述z向调节机构相对于电极丝植入机器人的连接杆在z向上与所述连接杆连接,所述x向调节机构相对于所述z向调节机构在x向上与所述z向调节机构连接,所述x向调节机构与所述电极板支架固定连接。
3、上述电极板调节装置中,所述z向调节机构包括z向滑块,所述x向调节机构包括x向滑块,所述x向滑块以能相对于所述z向滑块滑动的方式部分嵌入所述z向滑块中。
4、上述电极板调节装置中,所述z向调节机构包括z向滑块,所述z向滑块以能相对于所述连接杆滑动的方式部分嵌入所述连接杆中。
5、上述电极板调节装置中,所述z向调节机构包括z向导槽、z向弹簧挡板、z向滑块、z向弹簧和z向旋钮;靠近所述连接杆与y轴丝杆连接端的相对端,在所述连接杆的侧壁上开设有所述z向导槽;在所述连接杆与y轴丝杆连接端的相对端上设置有所述z向弹簧挡板;
6、所述z向滑块滑动设置在所述z向导槽中;所述z向弹簧设置在所述z向滑块的顶端与所述z向导槽所在的所述连接杆的顶面之间;所述z向旋钮的杆部穿过所述z向弹簧挡板后与所述z向滑块接触。
7、上述电极板调节装置中,所述z向调节机构包括z向导槽、z向弹簧挡板、z向滑块、z向弹簧和z向旋钮;靠近所述连接杆与y轴丝杆连接端的相对端,在所述连接杆的侧壁上开设有所述z向导槽;在所述连接杆与y轴丝杆连接端的相对端上设置有所述z向弹簧挡板;
8、所述z向滑块滑动设置在所述z向导槽中;所述z向滑块靠近所述z向弹簧挡板的一端开设有z向光孔,所述z向弹簧设置在所述z向光孔中;所述z向旋钮的杆部穿过所述z向弹簧挡板和z向弹簧后与所述z向滑块旋接。
9、进一步地,所述z向旋钮的杆部的顶端沿所述连接杆的长度方向穿出所述z向滑块,所述z向旋钮的端部与所述z向弹簧挡板的底端之间有预设距离。
10、进一步地,所述z向旋钮的杆部的顶端处于所述z向滑块中,所述z向旋钮的端部与所述z向弹簧挡板的底端接触。
11、进一步地,所述z向导槽所在的所述连接杆的侧壁上开设有滑槽,所述z向滑块的侧壁上设置有滑台,所述滑台滑动设置在所述滑槽中。
12、上述电极板调节装置中,所述x向调节机构包括x向导槽、x向弹簧挡板、x向滑块、x向弹簧和x向旋钮;在所述z向滑块与所述z向导槽连接端的相对端上开设有所述x向导槽;所述z向滑块在沿x方向的一侧上设置有所述x向弹簧挡板;
13、所述x向滑块滑动设置在所述x向导槽中;所述x向弹簧设置在所述x向滑块远离所述x向弹簧挡板的与所述x向导槽所在的所述z向滑块的侧壁之间;
14、所述x向旋钮的杆部穿过所述x向弹簧挡板后与所述x向滑块接触。
15、上述电极板调节装置中,所述x向调节机构包括x向导槽、x向弹簧挡板、x向滑块、x向弹簧和x向旋钮;在所述z向滑块与z向导槽连接端的相对端上开设有所述x向导槽;所述z向滑块在沿x方向的一侧上设置有所述x向弹簧挡板;
16、所述x向滑块滑动设置在所述x向导槽中;所述x向滑块靠近所述x向弹簧挡板的一端开设有x向光孔,所述x向弹簧设置在所述x向光孔中;所述x向旋钮的杆部穿过所述x向弹簧挡板和x向弹簧后与所述x向滑块旋接。
17、进一步地,所述x向导槽所在的所述z向滑块的侧壁上开设有滑槽,所述x向滑块与z向滑块连接一端的侧壁上设置有滑台,所述滑台滑动设置在所述滑槽中。
18、根据本实用新型实施例的第二方面,本实用新型还提供了一种电极丝植入机器人,其具有上述任一项所述的电极板调节装置。
19、根据本实用新型的上述具体实施方式可知,至少具有以下有益效果:本实用新型提供的电极板调节装置通过在现有y轴丝杆和连接杆的基础上增加z向调节机构和x向调节机构,能够在重新安装完新的电极丝贴块之后,利用z向调节机构和x向调节机构调节电极丝贴块在z向和x向与钨针之间的相对位置,使钨针的针尖对准电极丝的丝孔,从而保证钨针能够较容易的穿进电极丝的丝孔内,进而显著地提高植入效率。
20、应了解的是,上述一般描述及以下具体实施方式仅为示例性及阐释性的,其并不能限制本实用新型所欲主张的范围。
- 还没有人留言评论。精彩留言会获得点赞!