一种具有外压力检测功能的皮肤检测操作机器人系统的制作方法
本技术涉及皮肤检测领域,尤其涉及一种具有外压力检测功能的皮肤检测操作机器人系统。
背景技术:
1、皮肤检测对于美容、皮肤病医学等领域具有重要意义,随着技术的发展出现了多种种类的皮肤检测探头,其中每种探头用途各不相同,如有的用于皮肤组分(水分/油脂)的含量检测、有的用于皮肤弹性检测、有的对皮肤光泽度进行检测。
2、目前各类皮肤检测探头普遍存在的问题是每次测量的力度、位置、角度不统一。例如已知ep88108905a公开的对皮肤弹性的非侵入性声学测试探头,操作者每次检测时通过将探头外壁的前端面压在皮肤上再推动内部的探针4、5、6接触皮肤进行检测,压电换能器1、2、3将声音脉冲传输至探针,根据声音在探针间传输的时间跨度测试皮肤弹性。在一些需要对皮肤参数持续跟踪的实际场景中,由于探头对皮肤的接触由操作者手动控制,导致无法确保每次检测对皮肤采用同一位置/角度/力度,前后所测得数据的差异无法区分是因为皮肤变化导致还是因为位置/角度/力度的改变造成的影响。
3、us20020029924a1提出的用于测量表面结构的弹性性质的测量装置,注意到对于测量结果的值来说,要比较的测量结果取自表面结构(皮肤)的相同位置/角度是至关重要的,进而采用标记的方式,在外壁的环形凸缘35设置圆周上的两个孔40,用于在表面结构上施加颜色标记,例如用笔,以便能够在相同的位置在相同的探头取向下以更大的时间间隔进行测量,此外,在环形凸缘设置彼此具有预定角距离的标记36,与探头2的壳体外部上的标记38对应,使测量装置可重复地定位在表面结构上的相同测量位置和相同角度位置上。us20020029924a1能够解决相同位置/角度,但无法解决相同压力的问题,而确保压力的相同实际在对皮肤测量尤为重要。原因在于皮肤本身具备一定弹性模量,在《stiffness andelasticity of the masticatory and facialexpression muscles in patients withthe masticatory musclepain》korean j oral med,vol.34,no.3,2009的研究中人体皮肤的弹性约在0.70±0.46n左右,而无论是测量皮肤弹性的探头亦或者是其他测量用途的探头,检测时除了探头内的传感器(如上述的探针)需要通过前端面的孔伸出并压到皮肤上外,探头壳体的前端面(如ep88108905a的保护壳12的前端面、us20020029924a1的环形凸缘35的前端面)在检测时也会压住人体皮肤,而如前面所述皮肤具有弹性模量且各处皮肤之间关联,前端面对其所覆盖皮肤的挤压,将导致前端面的孔内的皮肤的弹性/含水量/含油量发生改变,改变程度与挤压程度相关,进而给传感器的检测带来误差以及较为直接的干扰。实际测试中我们发现在前后相差不长的时间内,即便以相同角度测量相同位置的人体皮肤,前端面不接触皮肤/刚接触时的测量数据,与前端面压住皮肤时的测量数据也产生了差异。
4、因此,在皮肤检测中保障每次检测时具有相同外压力(前端面与皮肤之间的压力)以维持内环中传感器在各次测量中具有稳定测量环境(统一环境标准)非常重要。同时,内压力(传感器与皮肤之间的压力)的控制对人体安全性而言也具有重要意义,例如避免传感器在过大压力下对人体皮肤造成的穿刺伤害,实现保证测量安全性。
5、另一方面,皮肤检测设备的购买对象基本分为检测机构和用户两类,两者对产品的侧重以及购买力具有差异。在保证测量准确性的前提下,用户端侧重于价格、家用、携带等方面,检测机构偏向全自动、便捷以及检测稳定性,这种差异性反应到企业的制造中直接影响产品的设计需求以及制造成本。
技术实现思路
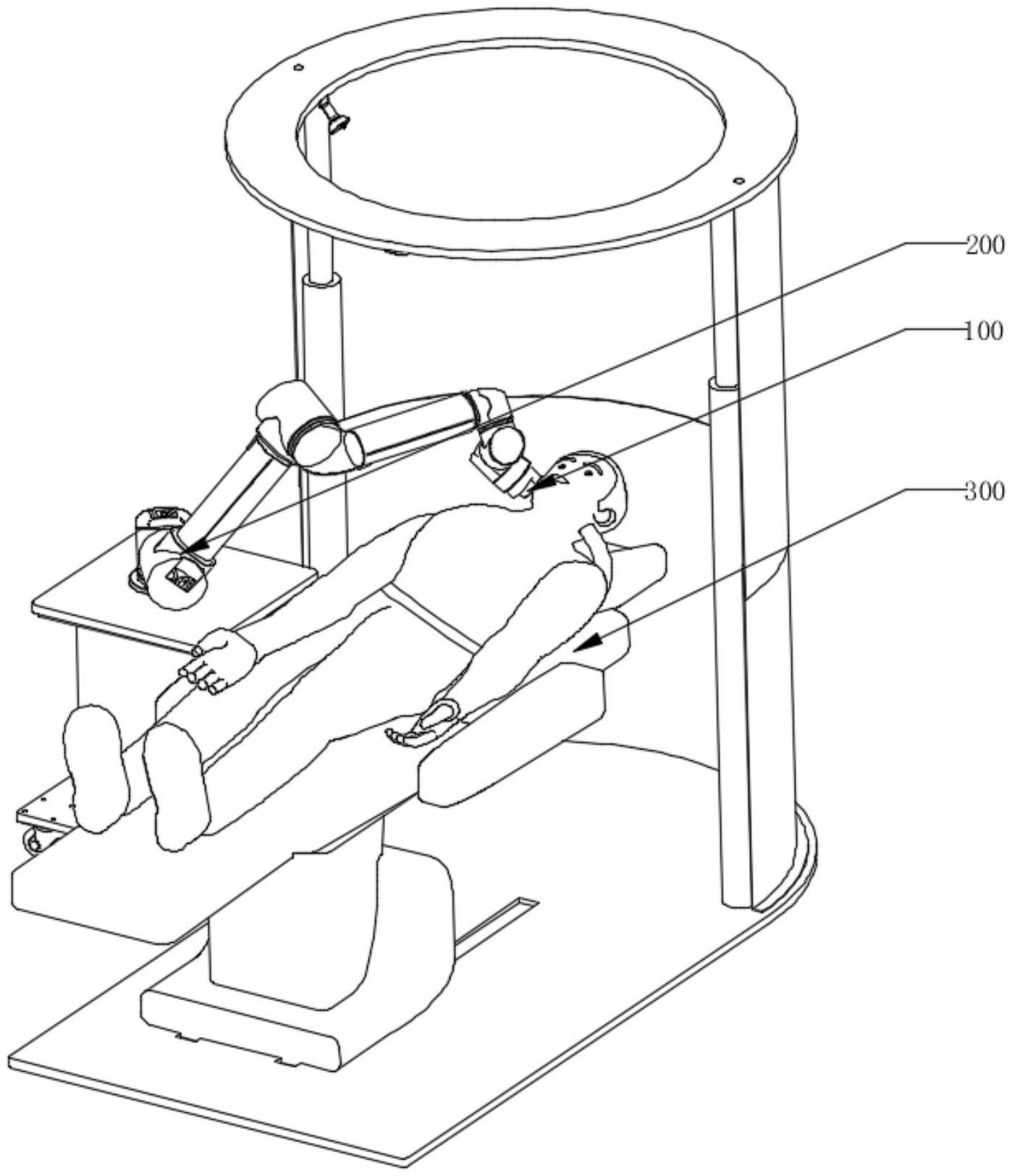
1、本实用新型的目的在于提供一种全自动控制机器人系统,适用于面向检测机构,该机器人系统能够全自动化便捷地实现每次皮肤检测的力度、位置、角度统一,维持传感器在各次测量中具有稳定测量环境,避免因压力不同尤其是外压力不同引入测量误差,同时要实现确保测量安全性。
2、为此,提供一种具有外压力检测功能的皮肤检测操作机器人系统,包括处理模块、探测端、外致动器、外压力检测装置,以及用以定位人体特定部位的辅助定位装置;探测端设置有用于检测人体特定部位处皮肤的探头,以及在探头的用于检测皮肤的传感器接触皮肤时直接或间接抵住皮肤的前端面;外压力检测装置被配置为在前端面直接或间接抵住皮肤时通过外压力检测装置感知前端面与皮肤的第一接触压力;外致动器,用以驱动前端面移动从而调整第一接触压力;探头配置有内压力控制装置,用于控制传感器与皮肤之间的第二接触压力;处理模块,分别耦合外致动器和外压力检测装置。
3、本实用新型具有以下优势:
4、(1)通过辅助定位装置定位人体特定部位后,控制外致动器以相同位置/角度驱动探测端进行检测,过程中利用外压力检测装置反馈前端面与皮肤的第一接触压力(外压力),通过外致动器调整第一接触压力至与之前测量一致,维持传感器在各次测量中具有统一外压力测量环境,避免引入测量误差;
5、(2)利用内压力控制装置控制传感器与皮肤之间的第二接触压力(内压力),保障测量安全;
6、(3)整体操作过程全自动化、便捷稳定,适用于面向检测机构。
7、本实用新型中,外致动器被配置为可移动的机械臂,机械臂驱动探测端整体进行zxy方向以及角度可变的移动,实现高自由度移动控制;传感器可以配置在藏于前端面下,使用时伸出接触皮肤,不使用时内藏实现保护,或者传感器配置固定在前端面上且外壁与前端面平齐。
8、作为一种改进方案,探头配置耦合处理模块的内压力检测装置,内压力检测装置用于检测传感器与皮肤之间的第二接触压力(内压力),达到内外双重检测目的。进一步的,内压力控制装置被配置为耦合处理器的内致动器,内致动器设于探头中,可以是如电机或微型运动装置等部件,用以驱动探头上的传感器精密移动从而调整传感器与皮肤之间的第二接触压力,通过配置内致动器搭配第二接触压力的检测反馈,实现在控制外压力统一下的内压力精确控制,确保每次测量所使用内压力也能一致,此时,外致动器实现大幅度、高自由度及角度的移动控制,内致动器用于微调。本实用新型中,内压力控制装置也可以搭配如提示装置使用,如在检测到内压力与上次一致时进行示意操作者停止调整传感器位置。在另一种实施方案中,内压力控制装置也可以配置为如弹簧等弹性体,传感器通过弹性体固定至探头从而将第二接触压力弹性控制在设定区间内,较之于上述能够达到精确控制的方案,此种方案达到对内压力的泛控制(弹性控制在一定范围内)并带来结构、成本优势。
9、作为另一种改进方案,辅助定位装置被配置为固定支架,用以辅助固定人体特定部位,例如检测眼睛视力仪器上的用于托住下巴的支架,检测过程中利用支架确认人体位置,通过外致动器将探头精准移动到检测位置进行测量。更优选地,固定支架进一步配置为可移动折叠椅,可移动折叠椅跟随轨道移动,设定双极限位,可实现坐姿、躺卧不同方式检测,同时在可移动折叠椅对应人体勃颈处加设颈部固定装置实现定位。和/或辅助定位装置被配置为耦合处理模块的视觉扫描成像系统,视觉扫描成像系统通过3d扫描成像技术扫描人体特定部位来确认目标检测位置,处理模块依据目标检测位置控制机械臂移动,从而将探头精准移动到检测位置进行测量。进一步的,视觉扫描成像系统由三组扫描摄像头共同搭建组成,实现对人体三侧面全方位检测,进而实现精确构建人体模型,三组扫描摄像头设置在配置的主体支架,主体支架高度可调节,可匹配不同身型人群精准扫描定位。
10、本实用新型中,外压力检测装置的数量被配置为至少两个,并围绕探头布置,以兼顾周向各个位置,确保检测均匀性。
11、进一步的,为避免在传感器与皮肤之间增设物体带来传感器的测量误差,内压力检测装置采用为电容式压力感应组件用以间接测量所述接触压力(不适宜采用电阻式以避免需要垫在电极与皮肤之间)。其中,电容式压力感应组件可以通过面积/或距离进行间接反映压力,例如:
12、对于采用距离反映压力的方案可以通过以下形式实现:压力感应组件被配置为至少包含第一距离检测电极和第二距离检测电极,第一基体的一侧用于容置传感器,第一距离检测电极固定于第一基体远离传感器的一侧,第二距离检测电极被配置为沿第一基体的移动方向设置且至少部分或全部地对准第一距离检测电极;电容数字转换电路(cdc)耦合第一距离检测电极和第二距离检测电极用以获取两者之间的互电容;处理模块,用于依据第一距离检测电极和第二距离检测电极之间的互电容输出第一基体的移动距离信息。由于传感器紧贴皮肤,第一基体的移动与第二接触压力将形成比例关系,利用这一特点,工作过程中,第一基体的移动改变第一距离检测电极和第二距离检测电极之间的间距,进而引起两者的互电容变化,处理模块互电容变化测算得第一基体的移动距离后即可换算出压力数据,达到间接测量目的,此时,用于测量压力的距离检测电极位于第一基体一侧,传感器位于另一侧,两者互不干扰。更优选地,为避免第一距离检测电极相对于第二距离检测电极错开或倾斜,压力感应组件设置有导向柱,第一基体借助导向柱引导移动方向,具体结构的实现方式可以配置为第一基体套设在导向柱上。
13、对于采用面积甚至面积和距离一起反映压力的方案,可以采用如专利cn202223551426.5所示的二维力结构,通过将条形柔性多功能层内的圆柱状或半圆柱状曲面弹性上层电极固定在第一基体远离传感器的一侧(圆柱状或半圆柱状的曲面背离传感器),并在上层电极的下方设置有至少两个分布于长条两侧的下层电极,上层电极与下层电极之间形成不同的电容来反映力在不同方向上的分量,上层电极与下层电极之间设置绝缘层且上层电极向下的投影至少覆盖每个下层电极的部分面积。当第一基体移动时,上层电极在其条形的径向上受力形变带动上层电极改变与绝缘层的接触面积,进而反映压力的变化信息。或者,采用专利cn201910370967.1所示的三维力结构达到更高分辨能力的测量。此种方案中,同样实现间接测量且压力检测与传感器的皮肤检测互不干扰。
14、皮肤检测探头存在的另一问题是探头种类繁多,各探头的接口不统一带来后端对接设备不通用问题,对此,作为另一种改进方案,探测端设置有标准接头,用于可更换地与不同检测人体皮肤的探头对接从而实现探头的对应检测功能,解决接口统一问题。
15、更具体到皮肤检测探头中用于检测皮肤组分(水分/油脂)的探头,皮肤中的水分含量能在皮肤表面形成水分滋润,而油脂帮助皮肤起到锁水抑菌等目的,而传统检测皮肤中水分或油脂的方式,多采用薄膜测量法,利用薄膜吸收水分或油脂后通过光学方式进行标准比对,如美国专利4,532,937公开的微孔膜粘附在皮肤上用于吸收皮脂;美国专利5,119,828公开利用微孔疏水性聚合物膜,当孔充满气态材料时该膜不透光,而当膜孔充满皮脂时该膜变为半透明,利用这种的特性进行光学测量;又或者是德国专利de29700324u1公开通过测试膜进行皮肤分析评估等等。薄膜测量法属于间接测量,需要水分或油脂转移到测试薄膜上,再进行测试,转移过程中容易因各种不确定因素干扰带来误差。为此,市面出现采用直接测量法测试皮肤水分的方案,例如ck的角膜测量仪,其原理是采用电容式测量的方式,通过两个测量电极形成的互电容电场穿透人体皮肤,水的加入导致感应区域内介电常数发生改变进而通过测试的互电容值来反映出皮肤中水分的含量。此类方式,主要的问题在于我们希望测试到的是测量电极与皮肤之间的串联电容ca,而皮肤属于人体的外层组织,皮肤以下还存在例如血液等各类能够导电的物质,所有这些物质的集合会共同形成人体对地形成的分布电容(人体自电容)cw,无论测量自电容或互电容都会引入人体自电容cw,导致串联电容ca测量的不准确,影响测量的精度,而如采用切割部分皮肤等有创方式来隔离人体自电容cw,由于切割下来的皮肤活性流失等问题也将带来测量误差。为此,针对于皮肤检测探头中的检测皮肤组分(水分/油脂)的探头,即皮肤组分检测模块,可以将其传感器配置为至少包含第一测量电极、第二测量电极,第一测量电极、第二测量电极用于经绝缘层与皮肤接触,且第一测量电极与人体之间的串联电容ca1和第二测量电极与人体之间的串联电容ca2的比值被配置为设定已知的比例系数k,皮肤检测操作机器人系统设置有电容数字转换电路,电容数字转换电路耦合各个测量电极,并获取第一电容和第二电容,第一电容被配置为通过第一测量电极获取到的第一自电容测量值、通过第二测量电极获取到的第二自电容测量值、通过第一测量电极与第二测量电极并联获取到的第三自电容测量值、通过第一测量电极与第二测量电极获取到的第一互电容测量值中的其中一者,第二电容被配置为其余三者之一;处理模块,用以基于第一电容来构建以人体对地分布电容cw、对应的串联电容为变量的第一方程,以及基于第二电容来构建以人体对地分布cw、对应的串联电容为变量的第二方程,利用第一方程与第二方程组成的方程组以及比例系数k计算串联电容ca1或串联电容ca2来输出皮肤内的组分信息。实际场景中,皮肤组分检测模块检测时第一测量电极、第二测量电极通过绝缘层紧贴皮肤,电极与皮肤之间的间距固定,如此只有设置好生产制造后的第一测量电极、第二测量电极的面积之比,即可利用结构设定使得比例系数k确定(一者的串联电容为ca,另一者的串联电容为k*ca),在此基础上,通过两次测量电极的自电容或互电容,由于自电容或互电容均由cw与ca组成,因而每次测量能够构建一cw与ca的函数方程,利用两个方程组成的方程组对cw进行消元,即可构建ca与第一电容和第二电容的单调函数,进而利用两次测量得到的第一电容和第二电容求解ca。由于cw被消元,因此可以消除cw造成的测量误差进而准确测量计算出ca来反映皮肤组分含量。并且,利用电容数字转换电路(cdc),例如adi7142、adi7147,采用δ-σ调制方式通过多次对被测电容进行充放电并与参考电容比较的方法(参见:us patent number:5,134,401)直接将被测电容值转换成数字值,可以将对电容的测量灵敏度提高到1ff级别,容易满足测量系统对电容测量灵敏度的要求,特别是,这些芯片的设计具有多个通道,使得电路设计简单方便,从而有效降低成本和安装难度。
16、作为该改进方案的进一步改进,比例系数k被配置等于1,也可以不等于1。k等于1的方案可以通过设置第一测量电极、第二测量电极对应于人体的法向投影面积相同,以及第一测量电极与人体之间的间距与第二测量电极相同来实现,此种方案更利于减少算力提升检测速度,属于优选方案。对于k不等于1的方案,可以通过设置面积和/或间距的不同来实现,例如将第一测量电极的面积设置为第二测量电极面积的一半,或者,将第一测量电极与人体的间距设置为第二测量电极与人体的间距的1/3等。
17、作为该改进方案的进一步改进,将第一电容被配置为第一自电容测量值或第二自电容测量值,第二电容被配置为第一互电容测量值,此时,以第一自电容测量值、第二自电容测量值中的其中一个为cs,其对应的串联电容为ca,则另一个的串联电容的值为k*ca;ca的计算方式进一步被配置为:
18、
19、式中,cx为第一互电容测量值,k1为0.1-0.9,k2为误差允许数值,取值为测量值的±5%。此种方案中,第一电容被配置为自电容,第二电容被配置为互电容,利用自电容与互电容变换的方式获得更为准确的测量结果。
20、或者,作为该改进方案的替代,将第一电容被配置为第一自电容测量值或第二自电容测量值,第二电容被配置为第三自电容测量值,此时,以第一自电容测量值、第二自电容测量值中的其中一个为cs1,其对应的串联电容为ca,则另一个的串联电容的值为k*ca,ca的计算方式进一步被配置为:
21、
22、式中,cs2为第三自电容测量值,k1为0.1-0.9,k2为误差允许数值,取值为测量值的±5%。此种方案中,第一电容被配置为自电容,第二电容被配置为变面积后(通过模拟开关将两个电极合并使两者并联)的自电容,利用自电容变面积两次测量的方式获得更为准确的测量结果。
23、作为该改进方案的进一步改进,配置第一测量电极与第二测量电极之间的间距为0.1mm-2mm,从而确保两电极感知相同空间中的温湿度变化,避免距离过远而带来的两电极处的温湿度差异大的干扰。
24、本实用新型,所述的组分可以是水分或油脂,利用皮肤中水分和油脂处于不同深度(水深油浅)的特性,通过不同深度的检测来达到水油区分,此时,在测油脂时,通过电场线穿透深度的控制可以将水分与人体自电容共同作为cw,或者在测算浅层(如表皮组织的水分)时,通过电场线穿透深度的控制可以将更深层(如真皮组织和/或皮下组织)的水分与人体自电容共同作为cw。和/或,可以通过改变激励频率(使用对水敏感的激励频率、对油敏感的激励频率)来达到水油区分。
25、基于此,作为该改进方案的进一步改进,可以配置分布于不同位置的至少三个测量电极(包括第一第二测量电极),电容数字转换电路通过模拟开关阵列耦合各个测量电极,用以选择性地组合任意至少两个测量电极形成一对用于检测互电容的电极组。一方面,测量电极由多组互电容组成,通过模拟开关阵列切换,可实现不同位置组分检测,进而取平均值,减少由于测量次数间的位置差异带来的误差;另一方面,可以在此结构基础上配置通过组合形成至少存在两对电极组,其中每对电极组形成的互电容的电场线深度不同,来实现电场线穿透深度的改变。具体地,可以在该结构下采用变面积和/或变间距的方式,即通过不同的选择使所形成的各对电极组中两电极的面积或间距出现差异,如此,cdc所获取到的每对电极组形成的互电容的电场线深度就会产生差异,进而,实现检测不同深度或检测不同层皮肤组织的状态。其中变面积的方案,例如设置六个电极1-1、1-2、1-3、1-4、1-5、1-6,cdc通过模拟开关阵列测量1-2、1-3之间的互电容,此时互电容电场线穿透深度处于浅层,而后通过将1-1、1-2合并(并联),1-3、1-4合并,测量两个合并后的电极之间的互电容,合并后电极的面积增大,电场线穿透深度变深,此时可以测试到同位置下不同深度的皮肤组织;或者,先检测1-1、1-2之间的互电容,再将1-1、1-2合并,1-3、1-4合并测变面积后的互电容,从而测试不同位置下不同深度的皮肤组织。变间距的方案,上述六个电极可以是等间距或不等间距,例如等间距设置中利用1-1、1-2测试表皮组织,1-1、1-4测试真皮组织,1-1、1-6测试皮下组织;或者为简化布线设置不同间距中利用1-1、1-2测试表皮组织,1-3、1-4测试真皮组织,1-5、1-6测试皮下组织。从以上可以看出,在配置分布于不同位置的至少三个测量电极的基础上,通过cdc与模拟开关阵列的配合,可以达到多种功能目的:(1)便捷地通过求均减少测量次数间的位置差异带来的误差;(2)便捷地通过组合实现变间距和/或变面积进而检测不同深度,包括同位置不同深度和/或不同位置不同深度。本实用新型中,模拟开关阵列可以采用模拟信号路由器达到简单便利地自由组合切换,模拟信号路由器资料可以参考专利cn202110957486.8,此处不再赘述。更进一步的,可以将模拟信号路由器与cdc整合,例如采用cn202110956246.6的红宝石芯片,实现24位高速cdc、有效分辨率21.9位达到0.5ms的转换时间以及高精度触觉信号采集和编码。
26、更优选地,电极组被配置为包括以下至少两者:第一电极组,第一电极组中两电极的间距和/或面积被配置为使其互电容的电场线深度能够穿透至皮肤的表皮组织;第二电极组,第二电极组中两电极的间距和/或面积被配置为使互电容的电场线深度能够穿透至皮肤的真皮组织;第三电极组,第三电极组中两电极的间距和/或面积被配置为使其互电容的电场线深度能够穿透至皮肤的皮下组织。表皮组织、真皮组织、皮下组织共同组成皮肤,通过配置电场线至少穿透至其中两者甚至三者,配合cdc与模拟开关阵列进行求均能够达到更为全面接近地反映皮肤组分参数的目的,并且,能够选择性地对不同层的组织状态进行检测。上述的变面积和/或变间距的方式实现检测不同深度或检测不同层皮肤组织的方案中,基本遵循cdc输出至测量电极的激励信号的频率配置为固定不变的一种频率这一前提。在另一种改变检测深度的方案中,也可以采用将激励信号的频率配置为至少两种的方式实现,例如在固定间距固定面积的两个测量电极之间,例如第一测量电极与第二测量电极之间,通过在红宝石芯片中进行软件配置,使得在a时间段激励信号工作于第一频率,在b时间段工作于第二频率,由于频率不同,在趋肤效应的作用下,第一测量电极与第二测量电极之间的互电容电场线穿透深度也会发生变动,进而,实现不同深度的测量。值得注意的,当然也可以在变面积和/或变间距的基础上,进一步使用改变频率的方式达到更细粒度的深度控制。在此基础上,更优选地,可以配置所选用的各频率对皮肤中不同组分的敏感程度不同。例如,配置第一频率对水敏感而第二频率对油脂敏感,以此达到水油区分。
27、作为该改进方案的进一步改进,皮肤组分检测模块还包括有标准储液装置;标准储液装置至少包含密封腔体、设置于密封腔体内用于标定或差分测量的对应于组分的标准液体,以及用于检测不同环境下标准液体的电容值的液体检测电极;电容数字转换电路耦合液体检测电极;处理模块,用于依据所述标准液体的电容值对电容数字转换电路所获得的电容(自电容、互电容)进行修正。其中,当所测量的组分是水分时,所述标准液体为标准水体;当测量油脂时,标准液体对应变成油脂。所述的液体检测电极被配置为包含至少两个并分布于密封腔体外壁,通过两个液体检测电极的互电容检测腔体内标准液体的电容值。
28、在该改进方案中,标准液体用于标定的方法进一步包括检测当前时刻的标准液体的电容值与初始时刻的电容值的差异,利用该差异所反映的基准的变化对cdc所获得的电容进行修正。例如,假设标准液体的体积被配置为对应于满量程,初始时检测标准液体的电容值为a,意味着电容值a对应满量程,如果当前时刻检测标准液体的电容值不为a而为b,意味着环境(如温湿度)发生变动导致电容发生变动,此时同样体积的标准液体的电容值从a到b之间的差异,意味着基准发生变动,此时b才对应满量程,因此,需要将cdc所获得的电容对应于该基准变化进行修正。
29、在该改进方案中,标准液体用于差分测量的方法进一步包括通过数字电路cdc将标准液检测电极测得的电容值与使用者测得的电容值进行差分对比,可减弱由于环境因素改变引起的测量误差(共模干扰),标准液储存在密封腔体内部无需频繁替换,减少使用者进行皮肤检测时的对标操作,达到边测边标定,操作更加简便。
- 还没有人留言评论。精彩留言会获得点赞!