一种眼底药物注射辅助机器人的制作方法
本技术涉及医疗器械,具体而言,涉及一种眼底药物注射辅助机器人。
背景技术:
1、目前,当眼底视网膜上的血管发生病变时,临床上应用最广发以及最有效的治疗方案是通过眼底注射基因药物的方式,来治疗眼底血管的病变或者阻塞等症状。在眼底血管注射药物的手术中,医生需要一手持导光笔,另一手持注射针,此时医生手的颤抖,以及对操作力感知能力不足、手术技能的欠缺均会降低手术的成功率,并且由于医生手部的生理颤抖,可能会导致患者眼部切口或眼底血管破裂,对患者造成二次伤害。因此需要一种眼底药物注射辅助机器人来代替医生完成眼底血管注射药物,可以避免医生手颤抖对手术效果的影响。
技术实现思路
1、本技术实施例提供一种眼底药物注射辅助机器人,结构简单,能够代替医生完成眼底血管注射药物,提高医生的使用体验,操作更为舒适。
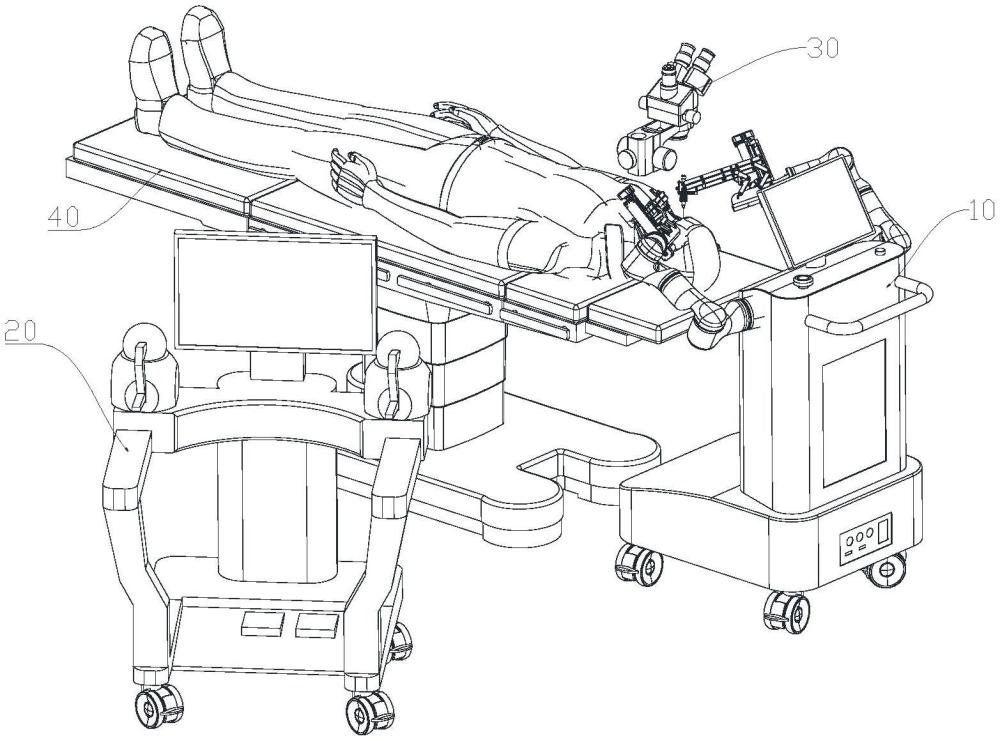
2、本技术实施例提供一种眼底药物注射辅助机器人,眼底药物注射辅助机器人包括机械臂台车和医生主控台车,机械臂台车包括第一底座模块、台车主体模块、人机交互模块和执行模块,台车主体模块设置于第一底座模块,人机交互模块设置于台车主体模块上,人机交互模块用于控制执行模块实现不同的工作状态,执行模块用于进行眼科手术;医生主控台车包括用于供医生操作的操作平台模块,操作平台模块与机械臂台车之间电连接,以用于控制机械臂台车的执行模块执行眼科手术。
3、在本方案中,通过眼底药物注射辅助机器人包括机械臂台车和医生主控台车两个单元,机械臂台车中的第一底座模块可以给机械臂台车提供安装基板的作用,而人机交互模块可以控制执行模块实现不同的工作状态,医生主控台车供医生使用,医生通过作用于操作平台模块,可以控制执行模块进行眼科手术,能够代替医生完成眼底血管注射药物,可消除医生手颤抖对手术效果的影响,提高医生的使用体验。
4、在一些实施例中,第一底座模块包括第一底座和接口面板,第一底座的底部设置有第一脚轮,第一脚轮上设置有刹车脚踏,接口面板设置于第一底座的背面一侧,接口面板设置有至少一个接口端。
5、上述技术方案中,通过在第一底座的底部设置有第一脚轮,第一脚轮可以实现机械臂台车的移动功能,通过第一底座的背面一侧设置有接口面板,接口面板可以实现外部线路的连接。
6、在一些实施例中,台车主体模块包括台车主体,台车主体内部具有供电器件和控制器。
7、在一些实施例中,台车主体模块还包括扶手,扶手设置于台车主体的背面一侧,以用于移动机械臂台车。
8、上述技术方案中,通过在台车主体的背面一侧设置有扶手,扶手可以供使用人员推动作用,从而将机械臂台车移动至合适位置。
9、在一些实施例中,人机交互模块包括触摸屏、开机按钮和急停按钮,触摸屏通过支架安装于台车主体的顶部,触摸屏用于供操作者触碰控制执行模块切换不同的工作状态;开机按钮用于控制机械臂台车的开机或关机,急停按钮用于在被触碰状态下控制执行模块停止工作。
10、上述技术方案中,触摸屏的设置,可以供操作者触碰触摸屏,便能控制执行模块实现不同的工作状态,通过急停按钮的设置,这样在紧急或者误操作情况下,按下急停按钮后执行端模块会停止工作。
11、在一些实施例中,开机按钮上设置有指示灯,指示灯具有点亮状态和熄灭状态,当指示灯处于点亮状态时,机械臂台车处于开启状态,当指示灯处于熄灭状态时,机械臂台车处于关机状态。
12、上述技术方案中,通过在开机按钮上集成有指示灯,指示灯亮代表机械臂台车处于开机状态,指示灯灭代表机械臂台车处于关机状态,从而便于使用人员能够更加直观的知晓机械臂台车的工作状态。
13、在一些实施例中,执行模块包括第一执行组件和第二执行组件,第一执行组件和第二执行组件分别位于台车主体的两侧,第一执行组件包括第一协同臂和第一末端器械,第一协同臂安装于台车主体上,第一末端器械设置于第一协同臂的末端,第二执行组件包括第二协同臂和第二末端器械,第二协同臂安装于台车主体上,第二末端器械设置于第二协同臂的末端。
14、在一些实施例中,医生主控台车还包括第二底座模块和支撑模块,第二底座模块包括第二底座和踏板,第二底座的底部设置有多个第二脚轮,各个第二脚轮上设置有刹车扳手,踏板设置于第二底座上,踏板上设置供医生脚踩的第一脚踏和第二脚踏;支撑模块包括主支撑和两个副支撑,两个副支撑位于主支撑的左右两侧,主支撑与副支撑之间具有间隙,以形成供使用者的腿部能伸出于医生主控台车外的伸出空间,主支撑和副支撑的下端连接于第二底座,其上端连接于操作平台模块。
15、上述技术方案中,通过在第二底座的底部设置有多个第二脚轮,可以实现医生主控台车的移动,满足位置转移的需求,通过第二脚轮上设置有刹车扳手,利用刹车扳手可以实现第二脚轮的锁定和解锁,支撑模块包括主支撑和两个副支撑,主支撑和两个副支撑的上端连接于操作平台模块,从而实现对操作平台模块的三点支撑,支撑稳定性高。并且,通过在主支撑与副支撑之间具有间隙,这样使用者,如医生在使用医生主控台车进行手术操作时,一般手术操作时间较长,长时间保持固定姿势后,腿部容易酸胀,但是医生又需要始终监控手术情况以避免突然情况,不能离开医生主控平台的操作位置,因此本方案中通过在主支撑与副支撑之间具有间隙,医生的腿部还可以保持坐姿,但是其腿部通过伸出空间伸出于医生主控台车的外部,进行伸张放松,利于医生快速缓解疲劳,更好的投入到手术操作中去。
16、在一些实施例中,由第二底座至操作平台模块的方向,副支撑依次包括第一直线段、折弯段和第二直线段,第一直线段的一端连接于第二底座,折弯段的两端分别连接于第一直线段与第二直线段之间,第二直线段远离折弯段的一端连接于操作平台模块,折弯段向外侧弯折延伸,以使第二直线段在第二底座的竖直方向的正投影至少部分位于第二底座外。
17、上述技术方案中,通过对副支撑的结构进行优化设计,副支撑依次包括第一直线段、折弯段和第二直线段,这样使得第二底座的底部占用空间相对较小,但是折弯段的设置,可以使得操作平台模块向外侧延伸设置,又能保证操作平台模块的平面空间,这样节约了医生主控台车的地面占用空间,又能保证满足医生上部操作空间,结构紧凑性强,且适用范围相对更广。
18、在一些实施例中,操作平台模块包括操作平台、第一控制器、第二控制器和显示器,操作平台设置于支撑模块的顶部,显示器通过升降支架设置于操作平台上,显示器用于显示眼科手术显微镜下患者眼底影像,第一控制器和第二控制器分别位于操作平台上显示器的两侧,第一控制器和第二控制器分别用于控制第一末端器械和第二末端器械动作,机械臂台车还包括显微镜,显微镜与显示器通过线缆连接。
19、上述技术方案中,通过操作平台可以供第一控制器、第二控制器和显示器布置,显示器用于显示患者的实时眼底情况,第一控制器和第二控制器分别位于操作平台上显示器的两侧,这样医生的左右手可以协同操作第一控制器和第二控制器,从而控制第一末端器械和第二末端器械完成位姿变换以及眼底血管注药操作。通过显微镜与显示器通过线缆连接,医生可以通过操作平台模块上的显示器实时观察眼科手术显微镜下患者眼底影像,并操作医生主控台车上的第一控制器和第二控制器,控制第一末端器械和第二末端器械完成位姿变换,完成眼底血管注药操作。
20、在一些实施例中,主支撑的顶部开设有沿竖直方向延伸的插孔,操作平台上沿其厚度方向对应设置有避让插孔的避让孔,以使避让孔与插孔在竖直方向上相通;升降支架至少部分穿过避让孔插设于主支撑的插孔内,主支撑在插孔的外部螺纹连接有锁止杆,升降支架的外壁沿竖直方向间隔设置有多个限位凹槽,锁止杆的一端抵持于升降支架上多个限位凹槽中任意一者,以阻止升降支架在插孔内滑动。
21、上述技术方案中,通过在对主支撑结构进行改进,主支撑具有供升降支架插入的插孔,当然操作平台对应设置有避让孔,这样升降支架上的限位凹槽与主支撑上的锁止杆锁紧配合,可以对升降支架的高度进行固定,当不同的医生对显示器的高度需求不同,因此在需要调节显示器的高度时,仅需要旋松锁止件,使得升降支架可以在插孔内滑动,当升降支架的位置调整到位后,通过锁止件与升降支架上对应的限位凹槽抵持便可,从而完成升降支架的高度调节,适用范围更高,能够适用于不同身高或者不同需求的医生操作使用,从而能够更好的投入到手术操作中去。
22、本技术的其他特征和优点将在随后的具体实施方式部分予以详细说明。
- 还没有人留言评论。精彩留言会获得点赞!