用于医学设备的操作工具的制作方法
本公开涉及一种用于操作医学设备/医学产品/医学物体、尤其医学容器的操作工具以及一种由所述操作工具和所述医学容器构成的系统。
背景技术:
1、医学容器、例如无菌物品容器、具有软包装的筛篮等已经自动化地操作。这种操作借助于并行或串行的机器人进行,该机器人具有相应的操纵器、地面输送车辆、agv(自动导引车)、输送轨道和输送带、升降机系统和另外的在物流中广泛传播的输送技术。
2、在许多情况下,在高度自动化的aemp(用于医学产品的准备单元)中使用呈平板形式的承载装置,待运动的物体或产品位于该平板上。这实现与物体或产品的几何结构无关的安全的操作。然而不利的是,平板呈现附加的成本耗费、清洁耗费和物流耗费。
3、如果直接操作呈无菌物品容器形式的物体,则这迄今利用在物体的底部下方移动的铲形表现的工具来进行。这里不利的是,必须使用附加的机构来提升物体,以便将铲形表现的工具放置在物体下方。用这种工具不能从台板和/或从货架和/或容器运输车中抓取,因为在物体放在铲面上之前,物体会由于铲形表现的工具而移动。此外,在铲形表现的工具中限制了最大的移动/操作速度,其中可以排除物体的滑动。
4、在一般的物流应用中,对于这种应用,采用具有扁平的叉齿的叉车或起重装置,这些叉齿平行间隔开并且因此撑开理论的放置平面。然而这种扁平的叉齿不利的是,在待运输物体的底部中必须构造用于容纳叉齿的升降开口,由此所述物体的可用内部体积减少。对此备选地,待提升的对象(物体)必须放置在托盘上,该托盘必须是为了叉齿在下面移动而形成轮廓的。此外,通过仅基于力锁合将物体固定在叉齿上,限制了可以排除物体滑动的最大移动/操作速度,除非附加地固定物体以防止滑动,然而这又是繁琐的。
技术实现思路
1、因此本公开的任务是消除或至少减少现有技术中的缺点。具体而言,本公开的任务是,提供一种用于待操作的物体、尤其医学设备的操作工具,所述操作工具能够实现从任意的地面上或者说与物体的定位无关地抓取或者说容纳物体以及尤其在自动化操作时实现物体的高的操作速度。
2、在此,术语“抓取”首先应非常普遍地被理解并且不仅限于杆状的手柄,借助该手柄,物体被夹紧在两个分支之间,而是理解成任何容纳方式,包括简单地(松动地)在下面抓取物体(其中仅将力沿提升方向施加到物体上)或者嵌接到物体上的相应的容纳部中(其中虽然仅将提升力施加到物体上但是同时能够通过相应的引导阻止物体的侧向的滑动/滑落)。
3、因此上述任务通过优选根据权利要求1所述的医学操作工具以及通过根据并列权利要求所述的系统来解决。有利的改进方案在从属权利要求中公开,其内容必要时可以分离地以及独立地要求保护。
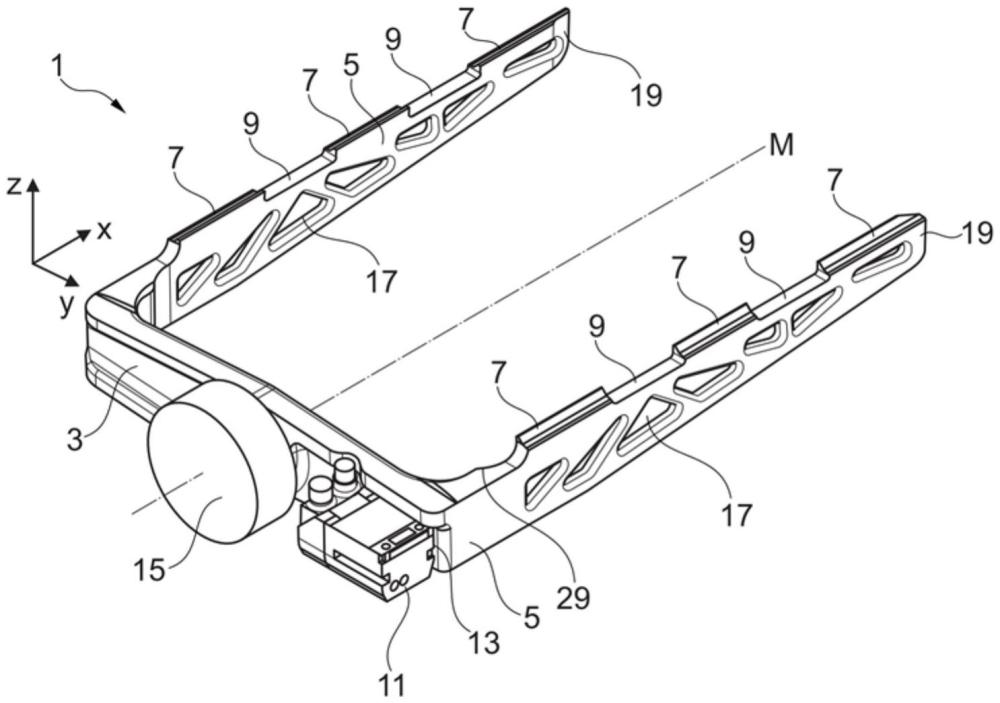
4、具体而言,该任务通过优选医学操作工具来解决,该医学操作工具被提供和构造用于抓取和/或操作医学设备/医学物体/产品/对象,优选是医学容器、进一步优选是无菌容器,所述操作工具具有叉形支架和两个沿纵向方向直角延伸远离所述叉形支架的平行间隔开的叉齿,所述两个叉齿中的每个叉齿具有容器支承/夹持侧,在所述容器支承/夹持侧上构造或布置有多个纵向间隔开的容纳凸起,所述容纳凸起沿(正)高度方向(即向上)延伸到所述容器支承/夹持侧。
5、换言之,操作工具包含叉形支架,该叉形支架从中间位置沿正宽度方向和负宽度方向大致对称地延伸。在叉形支架的相应的端部部段上沿宽度方向分别构造有沿正的纵向方向从叉形支架延伸离开的叉齿。再换言之,叉形支架和两个叉齿大致形成u形,其中,待操作的医学设备大致被容纳在构造在叉齿之间的容纳空间中。
6、叉齿包含容纳凸起,这些容纳凸起沿高度方向从叉齿延伸离开。高度方向应理解为这样的方向,该方向大致正交于由纵向方向和宽度方向撑开的平面取向。容纳凸起通过留空部彼此分离。优选地,每个叉齿构造至少两个容纳凸起。优选地,在全局坐标系中,叉形支架在高度方向上的延伸大于在纵向方向上的延伸。另外优选的是,在全局坐标系中,叉齿在高度方向上的延伸大于在宽度方向上的延伸。
7、因此本公开的核心是操作工具,由叉形支架和两个叉齿构成,其中,叉齿分别构造有(向上延伸的)容纳凸起。
8、通过将叉齿与容纳凸起一起构造可以实现待操作的医学设备在叉齿上的形状锁合的容纳/卡锁,由此在提高操作安全性的同时能够实现操作速度的提高。
9、在第一方面,叉齿的容纳凸起可以这样渐缩地、尤其楔形地构造,使得所述容纳凸起沿高度方向在所述叉齿的彼此面向的侧面上的高度延伸大于所述容纳凸起沿高度方向在所述叉齿的彼此背离的侧面上的高度延伸。
10、换句话说,叉齿的容纳凸起可以沿高度方向彼此相对地、尤其关于沿宽度方向的延伸渐缩,该宽度方向相应于叉形支架的延伸方向。
11、再换言之,容纳凸起可以具有斜坡几何机构,其高度朝向被构造在叉齿之间的容纳空间增加。斜坡几何机构优选地可以具有大致线性的轮廓。备选地,斜坡几何机构能够具有(部分)抛物线形的轮廓。
12、通过叉齿的容纳凸起的这种构造,可改善叉齿在待由操作工具操作的医学设备中的卡入过程。此外,通过这种构造可以补偿待操作的医学设备的制造公差、定位公差和/或变形。此外,通过这种几何结构可以实现容纳凸起和待操作的医学设备之间的(卡锁)连接的自锁。
13、在另一方面,所述叉齿可以包含背离所述容器支承/夹持侧的下侧,操纵凸起被构造或布置在所述下侧上,所述操纵凸起在深度方向/负高度方向上朝向所述下侧延伸并且所述操纵凸起优选这样渐缩地、尤其楔形地构造,使得所述操纵凸起在高度方向上在所述叉齿的相互面向的侧上的高度延伸小于所述操纵凸起在所述叉齿的相互背离的侧上在高度方向上的高度延伸。
14、换句话说,叉齿可以包含与容器支承/夹持侧背离的下侧,操纵凸起构造或者布置在该下侧上,该操纵凸起在深度方向上朝着下侧延伸并且该操纵凸起优选在负的高度方向上相互远离地、尤其关于在宽度方向上的延伸渐缩。
15、换句话说,叉齿可以包含沿负的高度方向远离叉齿延伸的操纵凸起。操纵凸起可以优选具有斜坡几何机构,其延伸在负的高度方向上朝向构造在叉齿之间的容纳空间倾斜。斜坡几何机构优选地可以具有大致线性的轮廓。备选地,斜坡几何机构能够具有(部分)抛物线形的轮廓。
16、操纵凸起能够实现当医学设备不位于叉齿之间时操纵位置或者推动或拉动待操作的医学设备。
17、在另一方面,操纵凸起可以被构造成关于所述叉齿的沿所述叉齿的纵向方向延伸的中轴线相对于所述容纳凸起旋转对称、尤其以180°旋转对称。
18、换句话说,操纵凸起的轮廓可以与在转动180°的状态中的容纳凸起的轮廓相应。
19、通过操纵凸起的这样的设计,操纵凸起能够以与容纳凸起在待操作的医学设备中的方式相应的方式钩住/卡锁,以推动或拉动医学设备。具体地,这种操纵凸起实现钩住/卡锁,使得当操作工具转动180°至初始位置时,叉齿中仅有一个叉齿与所属的操纵凸起嵌接。
20、在另一方面,操作工具可以包含优选在叉形支架中/上的传感器容纳部。
21、换言之,在操作工具上可以构造留空部等,其被设置构造用于容纳传感器。传感器可以是光学的和/或基于无线电的和/或基于超声波的传感器,其适合于例如根据标签/标记来识别待操作的物体、尤其是医学设备。
22、备选地或附加地,操作工具可以包含在至少一个叉齿上的传感器容纳部。
23、通过操纵工具的这种构造,能够实现将上述传感器安置在操作工具中/上。这种传感器在检测医学设备关于操作工具的尤其相对位置时进行辅助,由此实现所述操作工具的自动化的并且计算机辅助地限定的方法。
24、在另一方面,两个叉齿之间的距离可以优选无级式可变。
25、换句话说,叉齿可以相对于叉形支架在宽度方向上、即在叉形支架的延伸方向上运动。优选地,叉齿能够借助于至少一个螺纹杆或至少一个液压缸或至少一个气动缸运动。
26、通过这样构造操作工具,操作工具可以灵活地适配于多个医学设备,由此显著扩大操作工具的使用范围。
27、在另一方面,叉齿中的至少一个叉齿可以在背离叉形支架的端部部段上包含卡锁元件/卡锁几何结构,优选钩。
28、换言之,操作工具在叉齿中的至少一个叉齿上、然而有利地在两个叉齿上构造有卡锁元件,该卡锁元件实现形状锁合地嵌接到优选圆柱形的元件中。具体地,卡锁元件能够形状锁合地嵌接到尤其圆柱形的物体中,该物体理想地平行于叉形支架定向。物体例如可以是(医学)筛篮、(医学)丝框、盒子等的手柄和/或端口和/或孔眼。
29、在另一方面,叉齿中的至少一个叉齿可以构造有至少一个夹紧元件,优选是气动垫。
30、换言之,夹紧元件可以在朝向被构造在叉齿之间的容纳空间的方向上构造在叉齿中的至少一个叉齿上,但优选两个叉齿上,所述容纳空间被设置构造成建立与待操作的医学设备的力锁合。优选地,夹紧元件可以构造为气动的或液压的垫,该垫在施加压力时膨胀并且将夹紧力施加到待抓取的产品上。
31、通过将叉齿与至少一个夹紧元件一起构造可以阻止/防止优选呈医学设备形式的待抓取的产品的滑动。这尤其在待抓取的重产品、例如载重无菌物品容器的情况下是有利的,以便在操作工具方向变化时将待抓取的产品可靠地固定在操作工具中/上。
32、在另一方面,叉齿可以具有桁架结构(轻质结构)。
33、换言之,叉齿和/或叉形支架可以构造有符合负载的几何结构状,该几何结构具有减少重量的空隙,其中,未加载的区域可以构造成没有材料或具有减少的壁厚。
34、通过叉齿和/或叉形支架的这种构造,可以减少操作工具的重量。通过操作工具的较小的重量或由此引起的较小的惯性,可以提高操作速度。
35、在另一方面,叉形支架可以在背离叉齿的部段上包含机器人系统的端口。
36、换句话说,操作工具可以通过叉形支架借助例如呈凸缘形式构造的端口与机器人系统连接/可连接。端口可以构造在叉形支架上,以便将该端口沿宽度方向居中地布置在叉齿之间。
37、在另一方面,端口可以是可转动/可旋转的端口,使得操作工具能够围绕端口的平行于纵向方向取向的中轴线旋转。
38、此外,操作工具可以由纤维增强或玻璃球增强的塑料构造。备选地,操作工具可以由金属材料构造。
39、在另一方面,操作工具可以切削地、以层结构(复合塑料)、以注塑方法或借助于快速成型(添加式制造)来构造。
40、在另一方面,叉齿可以在背离叉形支架的端部部段处包含倒棱。这种倒棱使叉齿在紧贴定位的待抓取的产品之间的推入变得容易和/或防止叉齿钩住。此外,通过倒棱可以节省材料并因此节省重量,这减少了机械负荷。
41、在另一方面,叉齿可以在与构造在叉齿之间的容纳空间邻接的部段上分别包含优选呈半径形式的止挡。
42、在另一方面,容纳凸起可以齿形地构造在叉齿上。
43、在另一方面,叉形支架可以与叉齿材料一体地构造(整体结构方式)。备选地,叉齿可以形状锁合和/或力锁合地与叉齿连接(模块化结构方式)。
44、此外,该任务通过由优选根据上述方面任一项的操作工具和医学容器构成的系统来解决,其中,所述医学容器包含至少一个折边,并且所述叉齿被设置和构造用于通过所述容纳凸起和/或所述操纵凸起形状锁合地接触和/或固定所述医学容器的折边。
45、换言之,系统包含操作工具和优选呈无菌物品容器的形式的医学容器。容纳凸起和/或操纵凸起在其几何结构上与医学容器的折边的几何结构协调。换句话说,容纳凸起和/或操纵凸起这样构造,即,它们形状锁合地嵌接到折边中。
46、在一个方面,所述医学容器可以具有带有尺寸axb的基面并且a是在所述纵向方向上的叉齿的长度的1/3的倍数。
47、换句话说,叉齿的长度可以以限定的关系与医学容器的尺寸协调。
48、通过叉齿的这种构造,多个不同的医学容器或不同大小的医学容器可以借助于操作工具来操作。尤其可以利用操作工具来操作具有1/1、3/4和1/2长度的无菌物品容器。
49、在一个方面,折边可以对称地构造在医学容器的对置的侧壁上。
50、在另一方面,折边可以平行于医学容器的底部和/或边缘取向。
51、在另一方面,折边可以构造在医学容器的面向医学容器的开口的部段中。换言之,折边也可以沿高度方向构造在医学容器的上部部段中。
52、在另一方面,折边可以构造医学容器的开口的边缘部段。
- 还没有人留言评论。精彩留言会获得点赞!