用于近视手术的医疗机器人
本发明属于手术器械,具体涉及到用于近视手术的医疗机器人。
背景技术:
1、近视是屈光不正的一种,为了矫正屈光会采用近视手术,现有的近视手术包括全飞秒激光和半飞秒激光手术,前者是通过激光聚焦切割角膜基质透镜,之后由医生将切下的角膜基质透镜从眼球切口处取出,改变眼的屈光状态,后者是通过掀开角膜瓣,进行角膜基质激光切削矫正屈光度数,而由于眼球角膜操作空间小,医生手自然细微抖动容易造成损伤(人手抖动幅度在100μm左右,会驱动手术钳以10hz的频率振动),因此出现了医生操控医疗机器人来进行角膜基质透镜取出和角膜瓣掀瓣和复位操作。
2、现有的医疗机器人是一种结合了先进机器人技术和眼科手术技术的设备。这些机器人系统通常由高精度的机械臂、显微镜、成像系统、智能控制软件等组成,旨在提高激光治疗过程中的精准性和安全性,现有的医疗机器人通过线控操作,机械臂关节之间缺少固定结构,导致稳定性不足,同时一个机械臂上只能搭载一个操作工具,在近视手术中需要多种操作工具,因此需要设置多个机械臂,这就导致使用成本较高。
技术实现思路
1、本发明所要解决的技术问题在于克服上述现有技术的缺点,提供用于近视手术的医疗机器人。
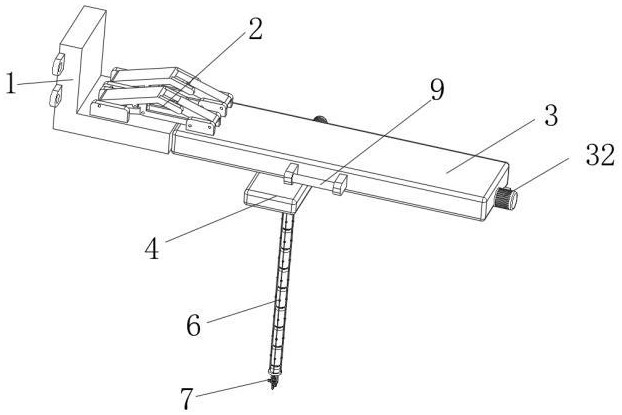
2、解决上述技术问题所采用的技术方案是:用于近视手术的医疗机器人,包括安装座,所述安装座上设置有铰链机构,所述铰链机构远离安装座的一端固定连接有y轴平移机构,所述y轴平移机构的下表面设置有x轴平移机构,所述x轴平移机构下表面设置有驱动箱,所述驱动箱的下表面设置有柔性机械臂,所述柔性机械臂远离驱动箱的一端固定连接有可变操作头,所述y轴平移机构的一侧固定连接有把手;
3、通过上述技术方案,使得医生无需使用多个机械臂或更换操作头即可使用不同的操作头进行手术,大幅降低了医疗机器人的成本,同时可以将机械臂进行锁定,大大提高了手术中的稳定性。
4、所述柔性机械臂包括若干机械臂小节,所述机械臂小节包括壳体,所述壳体内滑动连接有锁定移动块,所述锁定移动块的两侧均开设有循环滑槽;
5、所述可变操作头包括设置在底端机械臂小节的连接座,所述连接座远离机械臂小节的一端固定连接有一对连接板,所述连接板的一侧固定连接有第四电机,所述第四电机的输出端固定连接有转轴,所述转轴上固定连接有凸块,所述转轴贯穿设置有一对夹板,一对所述夹板之间固定连接有第一固定轴,所述夹板一侧固定连接有剪刀固定端,所述第一固定轴外转动套设有第一转动套,所述第一转动套一侧固定连接有剪刀活动端,一对所述夹板之间固定连接有第二固定轴,所述第二固定轴外转动套设有第二转动套,所述第二转动套的一侧固定连接有镊子活动端,所述夹板靠近第二固定轴的一侧固定连接有镊子固定端,所述凸块与夹板卡合配合。
6、通过上述技术方案,可以使操作头控制电机带动第一滚轮转动,第一滚轮带动操作头控制线转动,操作头控制线带动第一转动套或第二转动套转动,从而控制剪刀活动端或镊子活动端开合,进行手术操作,当需要更换操作头时,第四电机带动转轴转动,转轴通过凸块带动夹板转动,夹板进行180°转动更换操作头。
7、进一步的,所述夹板外侧两端均开设有固定凹槽,所述连接板内侧开设有一对固定槽,所述固定槽内固定连接有第三弹簧,所述第三弹簧远离固定槽的一端固定连接有钢珠,所述钢珠和固定凹槽相互卡合配合,所述第二转动套和第一转动套外均开设有线槽。
8、通过上述技术方案,在更换操作头时,钢珠被推动脱离固定凹槽,在夹板转动完成后,第三弹簧推动钢珠进入另一固定凹槽进行锁定,避免夹板随意转动。
9、进一步的,所述y轴平移机构包括固定在安装座下表面固定连接有第一保护壳,所述第一保护壳的一侧固定连接有第一电机,所述第一电机的输出端固定连接有第一丝杆,所述第一保护壳之间固定连接有一对第一滑杆,所述y轴平移机构包括与第一滑杆滑动连接有第二保护壳,所述第二保护壳与第一丝杆螺纹连接,所述第二保护壳的一端固定连接有第二电机,所述第二电机的输出端固定连接有第二丝杆,所述第二保护壳之间固定连接有一对第二滑杆。
10、进一步的,所述驱动箱包括滑动连接第二滑杆的箱体,所述箱体和第二丝杆螺纹连接,所述箱体的内底壁固定连接有若干第三电机,所述第三电机的输出端固定连接有第一绕线盘,所述第一绕线盘上缠绕有方向控制线,所述方向控制线贯穿滑动连接箱体,所述箱体的内顶壁固定连接有第一支架,所述第一支架上固定连接有操作头控制电机,所述操作头控制电机的输出端固定连接有第一滚轮。
11、通过上述技术方案,可以使四个第三电机分别控制第一绕线盘转动,第一绕线盘控制方向控制线的长短,从而使四个方向控制线相互配合控制可变操作头的朝向,大大提高了手术时机械臂的灵活性,而操作头控制电机则通过控制操作头控制线来控制操作头的开合。
12、进一步的,所述箱体的内顶壁固定连接有吊架,所述吊架的下端固定连接有固定座,所述固定座的两侧均滑动连接有支撑杆,所述支撑杆外套设有第一弹簧,所述支撑杆远离固定座的一端固定连接有固定架,所述固定架上转动连接有第二滚轮,所述箱体的内底壁固定连接有一对引导轮,所述引导轮、第二滚轮、第一滚轮和线槽外均套设有操作头控制线,所述操作头控制线贯穿滑动连接箱体,所述箱体的内顶壁固定连接有第二支架,所述第二支架上固定连接有锁定控制电机,所述锁定控制电机的输出端固定连接有第二绕线盘,所述第二绕线盘上缠绕有锁定控制线,所述锁定控制线贯穿滑动连接箱体。
13、通过上述技术方案,锁定控制电机通过带动锁定控制线移动从而控制机械臂的锁定与解锁,通过第一弹簧推动的固定架上的第二滚轮使操作头控制线始终保持在张紧状态,避免操作头控制线脱离线槽。
14、进一步的,所述壳体外侧固定连接有若干滑环,所述滑环内贯穿滑动连接方向控制线,所述壳体的上端开设有球形凹陷,所述壳体的下端固定连接有固定半球座,所述壳体靠近固定半球座的一端滑动连接有活动半球座,所述固定半球座内开设有滑道,所述活动半球座靠近固定半球座的一端固定连接有限位块,所述限位块与滑道相互滑动配合,所述锁定移动块上固定连接有连接架,所述连接架上开设有连接孔,所述连接孔内贯穿固定连接有锁定控制线。
15、通过上述技术方案,可以使机械臂小节组成机械臂,并通过锁定控制线拉动锁定移动块位移,而锁定移动块与金属限位杆相互配合,从而控制机械臂方向进行锁定与解锁。
16、进一步的,所述壳体的内壁开设有一对限位槽,所述固定半球座和活动半球座均与球形凹陷相互卡合配合,所述锁定移动块两侧固定连接有限位条,所述限位条与限位槽相互滑动配合,所述锁定移动块靠近球形凹陷的一端固定连接有第二弹簧,所述锁定移动块远离第二弹簧的一端固定连接有推杆,所述壳体内壁转动连接有一对金属限位杆,所述金属限位杆远离壳体的一端与循环滑槽滑动配合。
17、通过上述技术方案,锁定控制线通过连接架拉动锁定移动块沿限位槽移动,此时金属限位杆由于第二楔形块的阻挡,脱离第一滑槽和第六滑槽的交汇处的锁定,并沿第一滑槽移动,然后锁定控制电机停转,使第二绕线盘自由转动,之后在第二弹簧的推动下沿第二滑槽和第三滑槽移动,然后停留在第三滑槽和第四滑槽的交汇处,此时锁定移动块通过推杆推动活动半球座向外移动,使固定半球座和活动半球座分离扩张,由于机械臂小节通过球形凹陷连接,扩张的活动半球座和固定半球座不能在球形凹陷中自由活动,从而将机械臂小节进行锁定。
18、进一步的,所述循环滑槽包括开设在锁定移动块上的第一滑槽,所述锁定移动块位于第一滑槽一端的位置开设有第二滑槽,所述锁定移动块位于第一滑槽远离第二滑槽的一端位置开设有第六滑槽,所述锁定移动块位于第二滑槽远离第一滑槽一端的位置开设有第三滑槽,所述锁定移动块位于第三滑槽远离第二滑槽的一端位置开设有第四滑槽,所述锁定移动块位于第四滑槽远离第三滑槽一端的位置开设有第五滑槽,所述第一滑槽、第二滑槽、第三滑槽、第四滑槽、第五滑槽和第六滑槽相连通,所述第三滑槽内靠近第四滑槽的一端固定连接有第一楔形块,所述第六滑槽内靠近第一滑槽的一端固定连接有第二楔形块。
19、通过上述技术方案,可以使金属限位杆在循环滑槽内移动,从而限制锁定移动块的位置,使机械臂小节可以锁定和解锁。
20、进一步的,所述安装座包括l型固定板,所述l型固定板的一侧固定连接有若干定位板,所述定位板上开设有固定孔,所述铰链机构包括固定在l型固定板上的第一支撑架,所述第一支撑架上转动连接有第一连杆,所述第一支撑架上转动连接有第三连杆,所述第一连杆远离第一支撑架的一端转动连接有第二连杆,所述第二连杆远离第一连杆的一端转动连接有第二支撑架,所述第二支撑架上转动连接有l型连杆,所述l型连杆远离第二支撑架的一端与第一连杆转动连接,所述l型连杆和第三连杆转动连接,所述第一连杆远离第二支撑架的一端转动连接有第二转动座,所述第二连杆远离第二支撑架的一端转动连接有第一转动座,所述第一转动座和第二转动座之间设置有锁定弹簧,所述第二支撑架与y轴平移机构固定连接。
21、通过上述技术方案,可以使整体折叠竖起,避免占用手术台上方空间,方便其他手术仪器对眼部进行手部操作,而通过把手可以将整体下翻,通过l型连杆上的第二转动座和第一连杆上的第一转动座之间的锁定弹簧,在整体竖起状态下推动第一连杆向第二连杆方向转动,此时被墙面阻挡转动,从而使整体始终保持竖直状态,不会转动下落,而在下落时,通过锁定弹簧推动第一连杆向第二支撑架方向转动,此时在l型固定板的作用下阻止整体继续翻转,从而使整体稳定在水平方向。
22、本发明的有益效果如下:(1)本发明通过将驱动箱安装在x轴平移机构上,将x轴平移机构安装在y轴平移机构上,使得机械臂可以在x和y轴上移动,扩大移动范围,同时通过四个第三电机分别控制第一绕线盘转动,第一绕线盘控制方向控制线的长短,从而使四个方向控制线相互配合控制可变操作头的朝向,大大提高了手术时机械臂的灵活性,避免医生手动手术时因手抖导致的损伤;(2)本发明通过在机械臂下端设置可变操作头,通过操作头控制电机带动第一滚轮转动,第一滚轮带动操作头控制线移动,从而带动第一转动套或第二转动套转动,使剪子或镊子的活动端开合进行手术操作,而通过第四电机带动转轴转动,转轴通过凸块带动夹板转动,使得操作头旋转更换,在更换过程中,通过第一弹簧推动的固定架上的引导轮来使操作头控制线始终张紧,避免操作头控制线脱离线槽,在夹板转动到位时,通过第三弹簧推动钢珠进入固定凹槽内,将夹板进行锁定,避免操作头转动不到位,影响手术,通过可变操作头的设置,可以使医生无需使用多个机械臂或更换操作头即可使用不同的操作头进行手术,大幅降低了医疗机器人的成本;(3)本发明通过锁定控制电机带动第二绕线盘转动,第二绕线盘带动锁定控制线转动,锁定控制线通过连接架拉动锁定移动块沿限位槽移动,此时金属限位杆由于第二楔形块的阻挡,脱离第一滑槽和第六滑槽的交汇处的锁定,并沿第一滑槽移动,然后锁定控制电机停转,使第二绕线盘自由转动,之后在第二弹簧的推动下沿第二滑槽和第三滑槽移动,然后停留在第三滑槽和第四滑槽的交汇处,此时锁定移动块通过推杆推动活动半球座向外移动,使固定半球座和活动半球座分离扩张,由于机械臂小节通过球形凹陷连接,扩张的活动半球座和固定半球座不能在球形凹陷中自由活动,从而将机械臂小节进行锁定,大大提高了手术中的稳定性。
- 还没有人留言评论。精彩留言会获得点赞!