一种上肢康复机器人的制作方法
本发明涉及一种上肢康复机器人,属于肢体康复设备。
背景技术:
1、上肢康复机器人是一种用于帮助患有上肢功能障碍的患者进行康复训练的机器人设备。它可以通过模拟人手的运动和力量来帮助患者进行康复训练,提高患者的肌肉力量、关节灵活性和运动协调能力。在上肢康复机器人的帮助下,患者可以得到更系统、更个性化的康复训练,有助于提高康复效果和提升生活质量。
2、现有的上肢康复设备存在多种不足,比如cn114681860a,公开了一种人机交互式上肢康复训练设备,包括第一导向机构、第二导向机构、第一基座以及第二基座;其中第一导向机构与第一基座固定连接,第二基座机构位于第一导向机构上,跟随第一导向机构做上下运动;第二导向机构与第二基座固定连接,手柄、力传感器等与第二导向机构固定连接,跟随第二导向机构做左右运动。该设备中,第二导向机构运动时,第二基座上的连接线缆一直处于不停折弯的状态,极大的降低了线缆寿命;同时,第二导向机构固定连接于第二基座上,导致第二基座质量过大,进一步导致第一导向机构上的负载过大,第一驱动机构中需要选用更高功率的电机以及大减速比的减速机,成本高,且增加了上下运动方向的惯性和减速机的摩擦力、降低运动性能。
技术实现思路
1、发明目的:为了克服现有技术中存在的不足,本发明提供一种上肢康复机器人,将所有电机均设置在基座上,以减小运动部件的重量和惯性,从而缩小电机型号,进而可以取消减速机,提升整个装置的运动性能和力控制精度。
2、技术方案:为实现上述目的,本发明采用的技术方案为:
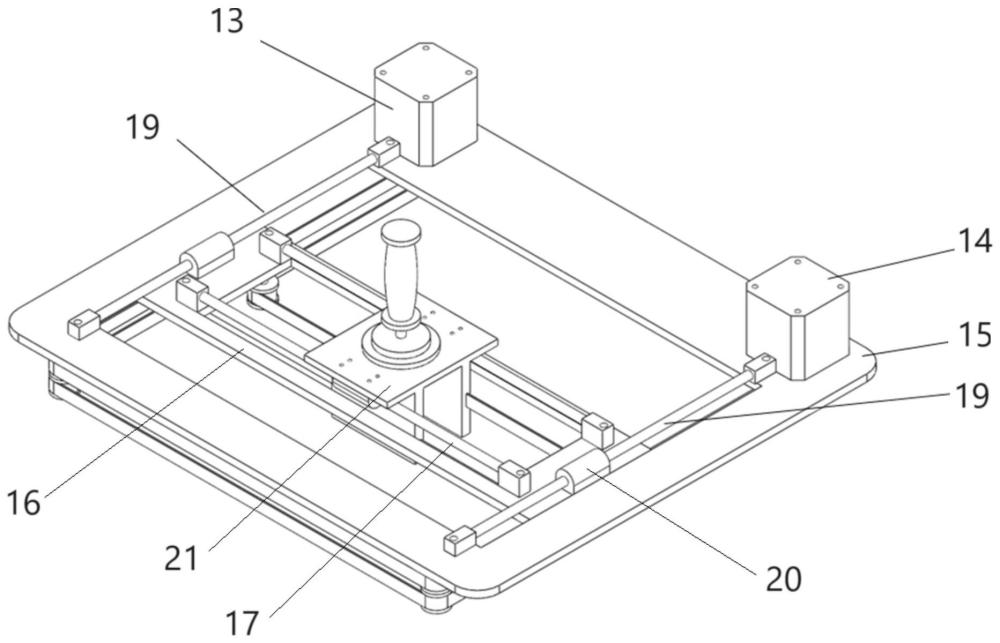
3、一种上肢康复机器人,包括用于安装手柄的移动平台、x轴基座、基座、电机i、电机ii、x轴导轨滑块、x轴导轨、y轴导轨滑块、y轴导轨、同步带i和同步带ii,x轴导轨滑块固定在移动平台上,x轴导轨固定在x轴基座上,x轴导轨滑块和x轴导轨相配合,y轴导轨滑块固定在x轴基座上,y轴导轨固定在基座上,y轴导轨滑块和y轴导轨相配合;电机i和电机ii均安装在基座上,在电机i的输出轴上安装主动轮i,在电机ii的输出轴上安装主动轮ii;将移动平台x向的两端分别称为x端i和x端ii;同步带i的一端固定在移动平台的x端i,经由主动轮i和一组从动轮,另一端固定在移动平台的x端ii;同步带ii的一端固定在移动平台的x端ii,经由主动轮ii和一组从动轮,另一端固定在移动平台的x端i。
4、本案中,x轴基座可以沿y轴导轨滑动,移动平台可以沿x轴导轨滑动,进而移动平台可以在xy平面内做任意轨迹的运动,从而帮助用户进行训练;两个电机都是固定在基座上的,减小了x轴基座的整体质量;进一步的,本案并没有适用减速机,消除了减速机引入的摩擦力,使得上肢康复机器人的输出力根据精准,能够提升交互体验;同时,电机线缆在整个运动过程中始终保持固定状态,避免了现有技术中不停发生弯折的问题,提高了整个装置的寿命和稳定性。
5、优选的,所述同步带i的绕经路线整体形成p字形,同步带i的一端固定在移动平台的x端i,依次绕经从动轮i、主动轮i、从动轮iii、从动轮v、从动轮vii后,另一端固定在移动平台的x端ii,从动轮i、主动轮i、从动轮iii、从动轮v和从动轮vii相对基座的高度一致,同步带i的任意平直段平行于x轴或y轴;所述同步带ii的绕经路线整体形成p字形,同步带ii的一端固定在移动平台的x端ii,依次绕经从动轮iiiv、主动轮ii、从动轮vi、从动轮iv、从动轮ii后,另一端固定在移动平台的x端i,从动轮iiiv、主动轮ii、从动轮vi、从动轮iv和从动轮ii相对基座的高度一致;安装从动轮i、从动轮ii、从动轮vii和从动轮viii的销轴安装在x轴基座上,安装从动轮iii、从动轮iv、从动轮v和从动轮vi的销轴安装在基座,从动轮iii和从动轮iv安装在同一销轴上,从动轮v和从动轮vi安装在同一销轴上,同步带ii的任意平直段平行于x轴或y轴。
6、优选的,所述电机i的输出轴、安装从动轮iii和从动轮iv的销轴、安装从动轮v和从动轮vi的销轴、电机ii的输出轴分布在一个矩形的四个角上,安装从动轮i的销轴、安装从动轮ii的销轴、安装从动轮vii的销轴、安装从动轮iiiv的销轴分布在一个矩形的四个角上。
7、优选的,将电机i传动的运动关系表示为将电机ii传动的运动关系表示为该上肢康复机器人的逆运动学关系表示为该上肢康复机器人的正运动学关系表示为从电机的输出扭矩到手柄的输出力的传递关系表示为其中:ji和jii分别表示电机i和电机ii的转动角度,x和y分别表示移动平台在x轴上和y轴上的位移,r表示主动轮i和主动轮ii的半径,fx和fy分别表示手柄在x轴方向和y轴方向的输出力,τi和τii分别表示电机i和电机ii的输出扭矩。
8、优选的,该上肢康复机器人的控制系统包括上位机、控制器和驱动器;所述上位机用于选择训练模式、调节训练参数和显示训练内容,训练模式包括主动模式、助力模式和被动模式,训练参数包括训练轨迹和训练速度;所述控制器用于接收上位机发布的训练参数,并生成控制指令;所述驱动器用于接收控制器发布的控制指令,生成电机i和电机ii的电流或电压控制信号,驱动电机i和电机ii。
9、优选的,所述主动模式、助力模式和被动模式中:
10、主动模式时,用户通过手柄主动发力的同时电机i和电机ii提供阻力,阻力的大小表示为其中,v表示移动平台的速度,fc表示库伦摩擦力,fv表示粘滞摩擦系数;
11、助力模式时,用户通过手柄主动发力的同时电机i和电机ii提供部分助力,该部分助力的大小通过上位机在训练参数中设置,将该部分助力分解成手柄在x轴方向和y轴方向的输出力fx和fy,然后控制器根据计算电机i和电机ii的输出扭矩τi和τii,并生成控制指令发送给驱动器;
12、被动模式时,通过电机i和电机ii控制手柄的运动速度和轨迹类型,手柄的运动速度和轨迹类型通过上位机在训练参数中设置,然后控制器生成控制指令发送给驱动器。
13、优选的,所述x轴导轨为平行于x轴的x轴导杆,x轴导轨滑块上设置有一个x轴贯通孔,x轴导杆插入x轴贯通孔内;所述y轴导轨为平行于y轴的y轴导杆,y轴导轨滑块上设置有一个y轴贯通孔,y轴导杆插入y轴贯通孔内。
14、优选的,所述移动平台为x向纵截面呈π字形的结构,包括一片用于安装手柄的顶板和两片用于安装同步带的侧板,两片侧板相对安装在顶板的下方,将两片侧板分别称为侧板i和侧板ii,侧板i的两端分别固定同步带i的一端和同步带i的另一端,侧板ii的两端分别固定同步带i的另一端和同步带i的一端。
15、优选的,所述x轴导轨滑块和x轴导轨有两组,设置在顶板的下方、位于两片侧板的外侧;所述y轴导轨滑块、y轴导轨有两组,分别位于x轴基座的两端。
16、有益效果:本发明提供的上肢康复机器人,将所有电机均设置在基座上,以减小运动部件的重量和惯性,从而缩小电机型号,进而可以取消减速机,提升整个装置的运动性能和力控制精度;同时,本案中的电机线缆在整个运动过程中始终保持固定,避免了现有技术中不停发生弯折的问题,能够提高整个装置的寿命和稳定性。
- 还没有人留言评论。精彩留言会获得点赞!