一种基于CT与激光口扫的口腔手术实时导航方法与流程
本发明涉及口腔影像处理,具体涉及一种基于ct与激光口扫的口腔手术实时导航方法。
背景技术:
1、在口腔手术中,精确的导航技术对于提高手术效率、减少并发症以及优化患者康复过程具有至关重要的作用。近年来,随着科技的进步,口腔手术实时导航技术得到了广泛的应用和深入的发展。这种技术通过将术前影像学数据与术中实时图像相结合,为医生提供精确的手术导航,从而极大地提高了手术的精确性和效率。口腔手术实时导航技术是一种基于图像引导的手术导航系统,它利用术前影像学数据(如ct、mri等)和术中实时影像学数据(如超声、内窥镜、双目摄像头等)进行配准,以精确地引导手术器械进行操作。通过实时导航技术,医生可以更精确地了解患者口腔颌面部的解剖结构,避免对重要结构造成损伤,提高手术安全性。此外,医生通过精确的导航,医生可以更快地找到目标区域,减少手术时间。并且,实时导航技术可以根据每个患者的具体情况进行个性化手术方案设计,提高治疗效果,减少对周围组织的损伤,有助于优化术后康复过程。
2、虽然口腔手术实时导航技术具有许多优势,但在实际应用中仍面临一些挑战,如设备成本高、操作复杂、数据安全等问题。然而,随着科技的不断发展,这些问题将逐渐得到解决。一般,口腔手术导航技术主要包括三个步骤:(1)数据采集:术前,对患者进行影像学检查,如ct、mri等扫描,以获取详细和准确的口腔颌面部结构信息;(2)图像配准:将术前的影像学数据与术中的实时影像学数据进行配准,使它们在空间上对齐,以提供精确的手术导航;(3)导航实施:在配准的基础上,通过计算机图形学技术,将手术器械的位置和方向实时显示在导航界面上,医生可以根据导航提示进行操作。
3、根据空间位置测量方法的类型,手术导航系统主要可分为机械、影像、电磁和光学定位四类:(1)机械定位:通过机械结构实现框架式定位,病人在局部麻醉后,将一个轻质立体定向框架固定在病人患处附近,去做ct等影像扫描,根据影像确定病灶位置和手术轨迹。但是,该方法的设备笨重,操作不灵活,患者佩戴较痛苦。(2)电磁定位:其原理是当传感器进入磁场发生器产生的可控变磁场后,传感器的线圈会产生电势差,医生通过在穿刺针、导管等医疗器械上安装传感器,来实时感应器械在人体的位置。但是该定位方法容易受到周围磁场的干扰,鲁棒性较差。(3)影像定位:利用影像技术(如内窥镜、x射线等)实时获取患者内部结构信息和器械位置信息,但该方法所获取的二维图像信息直观性较差,仍然需要医生凭借经验判断器械与病灶的相对位置,准确性与实时性较差。(4)光学定位:首先通过影像技术建立人体结构的世界坐标系,通过光学位置传感器识别器械与人体的相对位置。但是该方法容易受到其他遮挡目标的影像,导致器械跟踪丢失,降低定位的准确性。
4、针对现有基于光学定位的手术导航技术存在的缺陷,亟需提出一个基于激光口扫的口腔手术导航方法,有效解决手术时因为遮挡导致的定位不准确问题和设备容易受到电磁影响。
技术实现思路
1、为克服现有技术的不足,本发明提出一种基于ct与激光口扫的口腔手术实时导航方法,提高了手术的精确性和安全性,促进了牙科诊断、治疗的效率和效果,对于推动现代牙科医疗技术的发展具有重要意义。
2、为实现上述目的,本发明提供一种基于ct与激光口扫的口腔手术实时导航方法,包括:
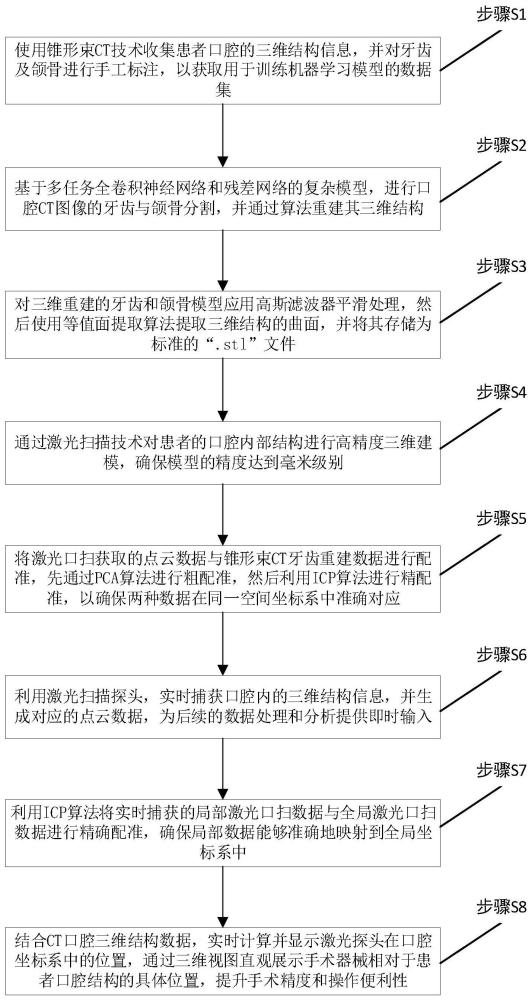
3、步骤s1:使用锥形束ct(cbct)技术收集患者口腔的三维结构信息,并对牙齿及颌骨进行手工标注,以获取用于训练机器学习模型的数据集;
4、步骤s2:应用基于多任务全卷积神经网络和残差网络的复杂模型,进行口腔ct图像的牙齿与颌骨分割,并通过算法重建其三维结构;
5、步骤s3:对三维重建的牙齿和颌骨模型应用高斯滤波器平滑处理,然后使用等值面提取算法提取三维结构的曲面,并将其存储为标准的“.stl”文件;
6、步骤s4:通过激光扫描技术对患者的口腔内部结构进行高精度三维建模,确保模型的精度达到毫米级别;
7、步骤s5:将激光口扫获取的点云数据与cbct牙齿重建数据进行配准,先通过pca算法进行粗配准,然后利用icp算法进行精配准,以确保两种数据在同一空间坐标系中准确对应;
8、步骤s6:利用定制化的激光扫描探头,实时捕获口腔内的三维结构信息,并生成对应的点云数据,为后续的数据处理和分析提供即时输入;
9、步骤s7:利用icp算法将实时捕获的局部激光口扫数据与全局激光口扫数据进行精确配准,确保局部数据能够准确地映射到全局坐标系中;
10、步骤s8:结合ct口腔三维结构数据,实时计算并显示激光探头在口腔坐标系中的位置,通过三维视图直观展示手术器械相对于患者口腔结构的具体位置,提升手术精度和操作便利性。
11、进一步地,步骤s1具体如下:
12、步骤s11:使用cbct设备进行患者口腔的三维扫描;
13、步骤s12:利用cbct的锥形束x线技术,替代传统的二维扇形束扫描,以获得更清晰的三维口腔结构图像;
14、步骤s13:对50例患者的cbct数据进行采集,确保数据覆盖健康个体、口腔疾病患者及术后患者;
15、步骤s14:对采集的图像中的牙齿和颌骨进行手工标注,为机器学习模型提供训练数据。
16、进一步地,步骤s2具体如下:
17、步骤s21:设计并实现一个基于多任务全卷积神经网络与残差网络模块的复杂口腔ct图像分割模型;
18、步骤s22:通过35个卷积层和4个最大池化层构建特征提取网络,采用残差模块优化特征学习过程;
19、步骤s23:利用特征融合网络将不同尺度的图像特征进行融合,以提高特征的辨识能力;
20、步骤s24:采用两个像素分类器,结合空间注意力模块和softmax函数,对ct图像中的牙齿与颌骨进行精确分类。
21、进一步地,步骤s3具体如下:
22、步骤s31:使用高斯滤波器对分割结果的曲面进行平滑处理,以减少噪声影响;
23、步骤s32:应用等值面提取算法(marching cubes),从分割结果中提取三维牙齿和颌骨的曲面;
24、步骤s33:将提取的牙齿与颌骨点云数据保存为“.stl”格式文件。
25、进一步地,步骤s4具体如下:
26、步骤s41:使用激光口扫设备对患者的口腔内部结构进行精确扫描;
27、步骤s42:通过激光或光学扫描技术,将口腔内部的形态和颜色等信息转化为数字信号;
28、步骤s43:使用计算机软件对扫描数据进行处理和分析,生成高精度的三维口腔模型;
29、步骤s44:对患者的上颌牙齿和下颌牙齿进行单独扫描,以获得更全面的口腔点云数据。
30、进一步地,步骤s5包括:
31、步骤s51:输入激光口扫点云与cbct牙齿点云数据到牙冠点云分类网络模型,得到分类后的牙冠点云;
32、步骤s52:基于深度学习模型和传统的配准算法,开发新的点云配准算法,以降低配准结果的误差性;
33、步骤s53:使用pca算法进行粗配准,将激光口扫牙冠点云与cbct牙冠点云对齐;
34、步骤s54:利用icp算法进行精配准,细化配准结果,确保高精度的配准。
35、进一步地,步骤s6具体如下:
36、步骤s61:配备尺寸较小的激光扫描探头,以便于嵌入到医疗器械中并且不影响手术操作;
37、步骤s62:医生在使用医疗器械时,实时捕捉和测量其附近的口腔三维结构信息;
38、步骤s63:通过重建口腔曲面生成对应的点云数据,并记录点云的顶点坐标数据。
39、进一步地,步骤s7具体包括:
40、步骤s71:将局部激光口扫数据和全局激光口扫数据输入到牙冠点云分类网络模型中,得到局部激光口扫数据的牙冠点云;
41、步骤s72:利用icp算法计算点云数据配准的转移矩阵和位移向量;
42、步骤s73:基于计算得到的参数,将局部激光口扫坐标系的原点映射到ct口腔坐标系中。
43、进一步地,步骤s8具体如下:
44、步骤s81:结合ct口腔三维结构数据,通过三维体绘制的方式实时显示患者口腔三维结构信息;
45、步骤s82:计算并实时显示局部激光口扫激光探头在ct口腔坐标系中的位置;
46、步骤s83:通过特定颜色的三维物体表示手术器械,显示在口腔三维结构中,以方便医生观察和调整手术器械的位置。
47、与现有技术相比,本发明的有益效果是:
48、1.本发明提供了一种基于ct与激光口扫的口腔手术实时导航方法,通过使用高精度的cbct扫描技术,提高对口腔结构三维信息的捕获精度,促进牙科诊断和治疗计划的精确性;通过采用先进的图像分割和三维重建技术,提高对牙齿和颌骨细节的可视化质量,促进牙科医生对病变区域的认识和手术准备。
49、2.本发明提供了一种基于ct与激光口扫的口腔手术实时导航方法,通过结合机器学习模型对ct图像进行深度分析,提高对复杂口腔结构的分割和识别能力,促进个性化治疗方案的制定;通过利用激光扫描技术进行高精度的三维口腔模型构建,提高对患者具体口腔状况的理解,促进更加精确的手术指导。
50、3.本发明提供了一种基于ct与激光口扫的口腔手术实时导航方法,通过精确配准激光口扫数据和ct牙齿重建数据,提高手术导航系统的准确性和可靠性,促进手术过程的安全性;通过实时局部激光口扫技术,提高对手术区域实时变化的捕获能力,促进手术过程中的即时决策和调整。
51、4.本发明提供了一种基于ct与激光口扫的口腔手术实时导航方法,通过精细的局部激光口扫与全局激光口扫配准,提高手术导航的空间定位精度,促进精准医疗和微创手术的实施;通过实时显示手术器械在手术坐标系中的位置,提高医生对手术区域的空间认识,促进手术操作的精确性和效率。
52、5.本发明提供了一种基于ct与激光口扫的口腔手术实时导航方法,通过整合ct和激光扫描数据,提高手术前规划与手术中导航的一致性,促进术后恢复和治疗效果的最优化;通过这套综合的技术方案,提高整个口腔治疗流程的标准化和系统化水平,促进牙科医疗服务质量的整体提升。
- 还没有人留言评论。精彩留言会获得点赞!