一种护理记录系统
本发明涉及护理记录,具体为一种护理记录系统。
背景技术:
1、护理记录是护理人员病人的病情观察和实施护理措施的原始文字记载,分别对应护理观察记录和护理诊疗记录,它们是临床护理工作的重要组成部分,在申请号为202210283067.5的中国专利中公开了“一种护理记录方法、终端、系统及存储介质,方法包括:接收护理记录单生成请求,护理记录单生成请求携带有患者身份信息;根据患者身份信息获取患者的住院信息;根据住院信息生成护理记录单,护理记录单中填写有住院信息;接收第一预设操作;若第一预设操作符合第一预设条件,则在护理记录单上执行第一处理,或者,接收第二预设操作;若第二预设操作符合第二预设条件,则在护理记录单上执行第二处理,实施本发明实施例提供的护理记录方法,不同疾病可以采用对应预设的电子护理记录单进行记录,从医院的系统中自动获取患者的住院信息后自动填写到护理记录单中,不需要人工手动输入填写,记录速度快。”;
2、该对比文件仅仅解决了目前,医院护士在对病人做护理记录时,多采用纸质记录单进行记录,但是因护士能级不同,不同的护士可能观察到的患者的病情和实施的处理措施不一致,不能建立统一的记录标准,且护士采用手写方式进行记录,患者的生命体征数据、住院号、入科时间以及诊断信息均需要手写,记录速度慢,影响护士及时实施护理服务的问题,未考虑到在通过护理机器人对被护理人进行移乘操作前,需要对被护理人的姿势进行识别,以为护理机器人提供可靠的被护理人的抱起姿势,保证被护理人在移乘过程中的安全性和舒适性,且对模型的训练集需要进行更新,并通过更新后的训练集对模型进行训练,以保证模型识别结果的准确率。
技术实现思路
1、本发明的目的在于提供一种护理记录系统,以解决上述背景技术中提出的问题。
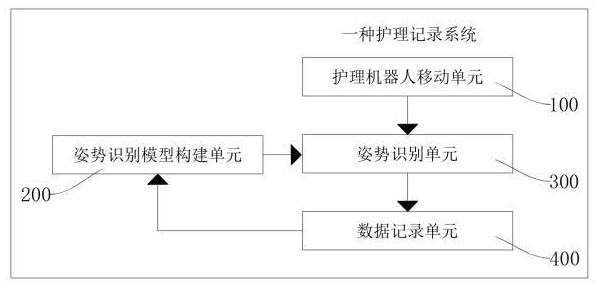
2、为实现上述目的,本发明提供如下技术方案:一种护理记录系统,包括护理机器人移动单元,所述护理机器人移动单元用于接收被护理人需要进行移乘时护工发出的信号,并基于该被护理人所在的位置信息进行路线规划,且基于规划的路线安排护理机器人前往相应位置,且在护理机器人到达相应位置后,对被护理人进行身份识别验证,且在身份识别验证成功后对被护理人进行移乘操作;
3、姿势识别模型构建单元,所述姿势识别模型构建单元用于构建姿势识别模型,并构建相应的模型训练用压力图像数据集,且通过构建的压力图像数据集对姿势识别模型进行训练,并在模型训练完成后,对姿势识别模型的精度进行验证;
4、姿势识别单元,所述姿势识别单元用于通过护理机器人对被护理人进行移乘操作前,且在护理机器人与被护理人接触时,对接触压力图像进行采集,并对采集的压力图像进行预处理,且基于预处理后的压力图像通过姿势识别模型对被护理人的姿势进行识别,进而通过护理机器人将被护理人抱起并进行移乘操作;
5、数据记录单元,所述数据记录单元用于对护理机器人在进行移乘操作的整个过程中获取的数据信息储存到构建的数据库内,并对数据库内的数据信息进行处理,且将采集的压力图像上传到压力图像数据集内,实现对压力图像数据集的增量操作,并通过增量后的压力图像数据集对姿势识别模型进行模型训练,以提高模型的适用性。
6、优选的,所述护理机器人移动单元包括信号接收模块和移动轨迹生成模块,所述信号接收模块用于接收当被护理人需要进行移乘时,由相应护工发出的请求信号,具体可通过电话与护理机器人管理人员进行联系的方式实现,且在电话联系过程中对被护理人所在的楼号、层号、病房号、床位号以及护工编号信息进行获取,所述移动轨迹生成模块用于基于信号接收模块获取的信息通过路线规划算法生成护理机器人的移动轨迹,其具体计算公式如下:
7、
8、式中,表示起点到目标点的总代价值,是选择路线过程中的评判依据,表示起点到当前节点n点的路径成本,表示使用启发式方法估计当前节点n到目标点的估计代价,且护理机器人基于生成的移动轨迹前往相应被护理人所在的位置的过程中通过护理机器人上安装的红外传感器对护理机器人各个方向上进行障碍物检测,从而实现避障功能,且各个护理机器人具有不重复的数字编号。
9、优选的,所述护理机器人移动单元还包括被护理人身份识别模块,所述被护理人身份识别模块用于当护理机器人基于移动轨迹生成模块生成的移动轨迹到达相应被护理人所在的位置时,通过护理机器人头部安装的视觉相机对被护理人进行人脸图像采集,且基于获取的被护理人所在的位置信息,通过医院的被护理人数据库获取被护理人的电子病历信息,进而获取被护理人的人脸图像信息,并与采集的被护理人的人脸图像进行比对,实现对被护理人的身份识别验证,且在身份识别验证成功后对被护理人进行移乘操作,且在身份识别验证失败后可通过相应护工远程与护理机器人管理人员进行对被护理人身份确认的方式实现对被护理人的身份成功验证。
10、优选的,所述姿势识别模型构建单元包括姿势识别模型生成模块和模型训练数据集构建模块,所述姿势识别模型生成模块用于基于vgg19构建姿势识别模型,所述模型训练数据集构建模块用于构建用于姿势识别模型的压力图像数据集,压力图像数据集具体由当护理机器人与测试者们接触时,通过护理机器人双臂上安装的触觉传感器采集得到的测试者们与护理机器人接触部位的压力图像组成,且对与压力图像相对应的测试者的关节点实际位置进行记录,并对压力图像数据集内的压力图像进行预处理,具体包括以下步骤:将压力图像转化为彩色图像进行处理与识别,采用阈值法从压力图像中分割出测试者与护理机器人双臂接触区域的压力图像,通过图像形态学技术对压力图像中的噪声进行滤波处理,利用开运算去除压力图像中孤立的点,从而凸显接触压力分布特征,且通过采用高斯函数,把人体位置坐标作为高斯函数的中心点坐标,生成人体位置热图,从而便于后续通过姿势识别模型对人体姿势进行识别。
11、优选的,所述姿势识别模型构建单元还包括模型训练模块和模型精度验证模块,所述模型训练模块用于通过经过模型训练数据集构建模块处理得到的压力图像数据集,对姿势识别模型进行模型训练,所述模型精度验证模块用于通过精度算法计算出姿势识别模型的精度值,其具体计算公式如下:
12、
13、式中,表示出姿势识别模型的精度值,表示识别正确的压力图像数量,表示识别错误的压力图像数量,且采用10cm规则作为识别正确与否的标准,具体为当姿势识别模型预测的关节点位置落在以实际关节点位置为球心、半径为10cm的区域内,则判断姿势识别模型的识别结果正确,反之则判断姿势识别模型的识别结果错误,当计算结果大于0.95时,表明出姿势识别模型的精度达到要求,当计算结果不大于0.95时,表明出姿势识别模型的精度不符合要求,需要对姿势识别模型进行优化调整,具体选用欧式损失函数作为姿势识别模型优化的损失函数,其具体计算公式如下:
14、
15、式中,表示热图索引,表示预测的关节位置,表示实际的关节位置,表示矩阵范数。
16、优选的,所述姿势识别单元包括数据采集模块和数据预处理模块,所述数据采集模块用于通过护理机器人对被护理人进行移乘操作前,且在护理机器人与被护理人接触时,通过护理机器人双臂上安装的触觉传感器对被护理人与护理机器人接触部位的压力图像进行采集,且对被护理人的关节点实际位置信息进行记录,所述数据预处理模块用于对采集的压力图像进行预处理,具体包括以下步骤:将压力图像转化为彩色图像进行处理与识别,采用阈值法从压力图像中分割出测试者与护理机器人双臂接触区域的压力图像,通过图像形态学技术对压力图像中的噪声进行滤波处理,利用开运算去除压力图像中孤立的点,从而凸显接触压力分布特征,且通过采用高斯函数,把人体位置坐标作为高斯函数的中心点坐标,生成人体位置热图,从而便于后续通过姿势识别模型对人体姿势进行识别。
17、优选的,所述姿势识别单元还包括被护理人姿势识别模块和护理机器人移动模块,所述被护理人姿势识别模块用于通过姿势识别模型对经过预处理的压力图像进行识别,从而为护理机器人提供可靠的被护理人的抱起姿势,所述护理机器人移动模块用于基于被护理人的位置信息和被护理人的移乘目的地位置信息,通过护理机器人将被护理人抱起并进行移乘操作。
18、优选的,所述数据记录单元包括数据储存模块、数据处理模块和数据上传模块,所述数据储存模块用于将护理机器人在进行移乘操作的整个过程中获取的数据信息储存到构建的数据库内,包括被护理人的位置信息、移乘目的地位置信息、被护理人身份信息、时间区间信息、护工编号信息、被护理人抱起姿势信息、压力图像、被护理人的关节点实际位置信息以及护理机器人的编号信息,所述数据处理模块用于将护理机器人在进行同一次移乘操作时获取的所有信息建立联系,所述数据上传模块用于将数据库内的压力图像上传到压力图像数据集内,实现对压力图像数据集的增量操作,并通过增量后的压力图像数据集对姿势识别模型进行模型训练,以提高模型的适用性。
19、与现有技术相比,本发明的有益效果至少包括:本发明提出了一种护理记录系统,通过设置的护理机器人移动单元接收当被护理人需要进行移动时的请求信号,并安排护理机器人前往相应位置,且在护理机器人到达相应位置后,对该被护理人的身份进行验证,从而避免出现出错的情况,通过设置的姿势识别模型构建单元构建姿势识别模型和相应的压力图像数据集,且对姿势识别模型进行模型训练,并对训练完成的姿势识别模型进行精度验证,且在姿势识别模型的精度不符合时对姿势识别模型进行优化调整,从而提高姿势识别模型的识别准确率,通过设置的姿势识别单元通过姿势识别模型对被护理人的姿势识别,进而为护理机器人提供可靠的被护理人的抱起姿势,保证被护理人在移乘过程中的安全性和舒适性,通过设置的数据记录单元将护理机器人在进行移乘操作的整个过程中获取的数据信息储存到构建的数据库内,并将同次移乘操作获取的数据信息建立联系,且将压力图像上传到压力图像数据集内,实现对压力图像数据集的增量操作,并通过增量后的压力图像数据集对姿势识别模型进行模型训练,进一步提高姿势识别模型识别的准确率。
- 还没有人留言评论。精彩留言会获得点赞!