一种柔性杆驱动的微型六自由度微创操作装置及其使用方法
本发明属于微创医疗,具体地说是一种柔性杆驱动的微型六自由度微创操作装置及其使用方法。
背景技术:
1、微创手术是一种经过表面微小创口实现内部手术操作的手术方式。由于创口狭小,内部操作空间不可见,徒手微创手术操作难度较大。基于手术机器人等多自由度操作装置的辅助器械在微创手术中具有重要价值。当前成熟的多自由度微创手术操作装置体积较大、成本高昂。小型化的微创手术操作装置具有体积小、占用空间少,易于移动、物料成本低等优点,在显微手术、应急救援、科学研究等领域具有较大的应用潜力
2、实现3d空间刚体的任意位置和姿态操纵至少需要6个自由度。现有的六自由度操作装置主要具有串联和并联两类构型。其中并联六自由度操作装置结构较为紧凑,但其运动空间通常较小,而且存在驱动装置间的运动学耦合问题。串联装置通过将各个自由度的构件依次连接实现多自由度构型,其结构较为简单。但是由于其逐级串联的构型,这要求基础端的自由度能承受较大的负载,同时前级自由度的误差也会干扰到后级自由度。尤其在小型化的6自由度操作者装置中,受微型结构和驱动装置体积、重量、精度、负载等因素限制,串联的自由度越多,其结构复杂度和误差风险就会越大。
3、如上所述,当前已有的小型化微创手术操作装置中,在自由度、负载、体积等方面仍存在一定不足。典型的如哈佛大学公布的折纸结构显微手术操作装置,其仅具备3个自由度,同时负载力仅为27毫牛顿,难以满足实际手术操作力的需求(h.suzuki,and r.j.wood,“origami-inspired miniature manipulator for teleoperated microsurgery,”naturemachine intelligence,vol.2,no.8,aug,2020);新加坡国立大学公布的可固定于颅顶的轻量级手术操作装置仅具有4个自由度,虽然其末端执行机构较小也可以提供较大的负载力,但是需要外置体积庞大的绳索驱动机构,这使其便携性能大打折扣(c.li,n.k.k.king,and h.ren,“askull-mounted robot with a compact and lightweight parallelmechanism for positioning in minimally invasive neurosurgery,”annals ofbiomedical engineering,vol.46,no.10,pp.1465-1478,oct,2018)。
4、如何优化结构构型,如何使其在保证小型化的同时具备足够的负载力、自由度,同时尽可能的降低结构复杂度,是微型化的微创手术机器领域亟需解决的重要问题。
技术实现思路
1、本发明的目的是针对现有技术存在的问题,提供一种能够用于钻孔、穿刺、注射等微创操作的柔性杆驱动的微型六自由度微创操作装置及其使用方法;该微型六自由度微创操作装置在兼顾运动精度、负载能力、体积和成本的同时,通过柔性杆驱动简化了六自由度运动结构的设计,并给出了解决运动控制问题的使用方法。
2、本发明的目的是通过以下技术方案解决的:
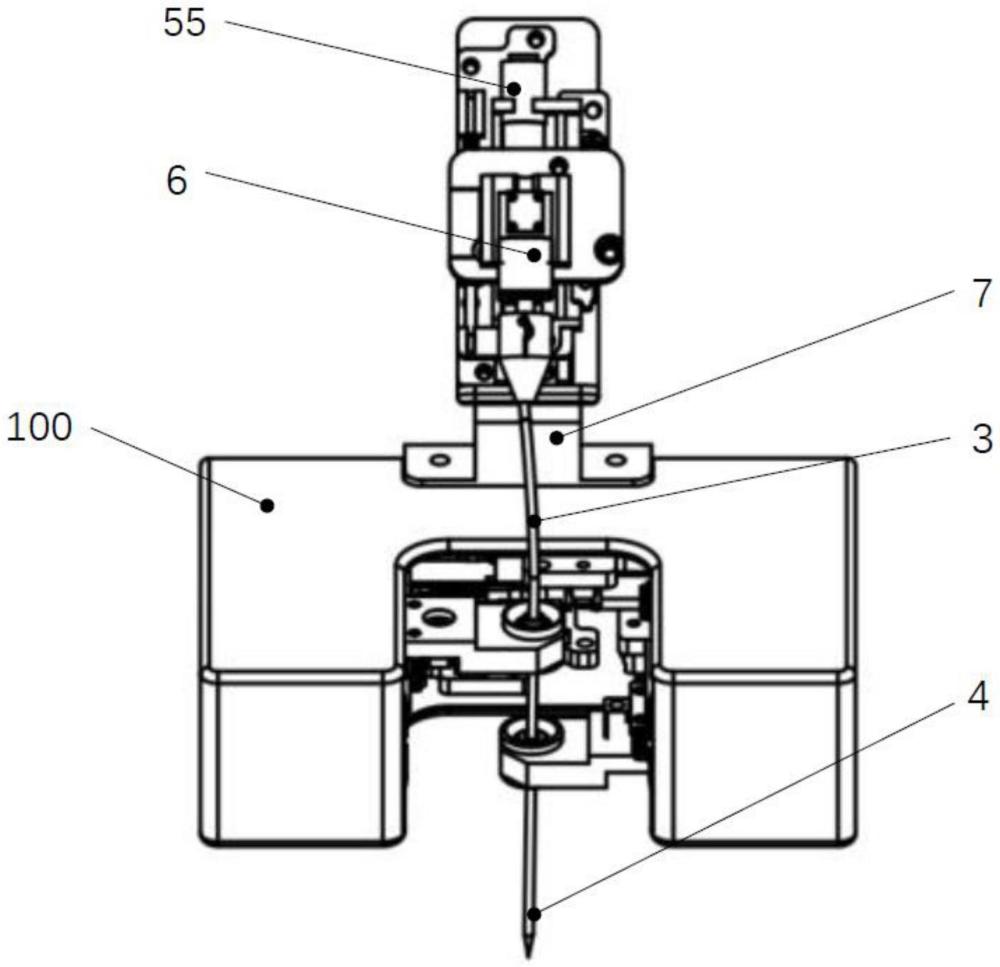
3、一种柔性杆驱动的微型六自由度微创操作装置,其特征在于:该装置包括五个进给单元,其中四个进给单元构成四自由度平面导向定位模组的驱动部分、剩下一个进给单元作为用于推拉操作工具沿z轴方向运行的第五进给单元,第五进给单元的输出末端上安装有能够实现操作工具沿z轴方向旋转的第六旋转单元,第六旋转单元的输出末端通过柔性传动杆连接贯穿四自由度平面导向定位模组的操作工具,操作工具能够在四自由度平面导向定位模组的作用下分别实现沿x轴方向和y轴方向的平移、以及分别绕x轴和y轴的双向偏转;第五进给单元、第六旋转单元、四自由度平面导向定位模组相互配合实现操作工具六自由度的精细可控运动。
4、第五进给单元通过旋进支架安装在四自由度平面导向定位模组的壳体上;旋进支架为刚性结构,其一端可与第五进给单元底座刚性连接、另一端可与四自由度平面导向定位模组的基座进行刚性连接。
5、在第五进给单元的输出末端上配置有插槽模块,且第六旋转单元的电机底座能够匹配插槽模块,第六旋转单元、柔性传动杆、操作工具组合构成能够根据需要切换的可调换模组。
6、所述的第六旋转单元包括电机底座、旋转电机、旋转减速器和传动杆连接件,布置成可嵌置结构(如设置燕尾槽结构)的电机底座上安装有旋转电机(伺服电机,如步进电机),旋转电机的输出末端安装有旋转减速器(如行星减速器),旋转减速器的输出末端上安装有连接柔性传动杆的传动杆连接件,当旋转电机旋转时,能够带动传动杆连接件进行旋转。
7、所述的柔性传动杆与第六旋转单元的输出末端固定的一端端部中心线与第六旋转单元的输出末端的旋转轴线同轴、所述的柔性传动杆与操作工具相连接的另一端端部中心线也与操作工具的旋转轴线同轴、操作工具的中轴线与四自由度平面导向定位模组的平面导向轴线同轴。
8、且由于柔性传动杆的存在,第五进给单元的进给轴线、第六旋转单元的旋转轴线以及四自由度平面导向定位模组的平面导向轴线不限定于平行或共轴线,也无需额外的齿轮、皮带连接,柔性传动杆可以通过自身形变补偿三者间的误差,同时在形变状态下也可以完成扭矩和推力的传递;由此可以简化六自由度微创操作装置的结构设计、实现微创手术装置的小型化。
9、所述的柔性传动杆为一大挠度细长杆,该大挠度细长杆采用记忆合金丝(镍钛合金)制成,其在发生一定程度的弯曲时仍然可以传递扭矩和推力。
10、所述的操作工具为微创显微手术操作需要使用的能够旋转和进给的刚性细长工具,典型的如微型钻头、穿刺针、注射针等;本发明就提供了直径0.5mm的微型钻头、直径0.2mm的穿刺针、直径0.3mm的注射针,微型钻头主要用于对硬组织的钻削,穿刺针状工具主要用于对组织实施刺破操作,注射针工具用于对目标组织注射药物或抽吸组织液;所有的操作工具均通过标准化的结构安装于单独提供旋转自由度的电机驱动端。
11、所述四自由度平面导向定位模组的驱动部分包括沿x轴方向布置的第一进给单元和第三进给单元、沿y轴方向布置的第二进给单元和第四进给单元,第一进给单元的驱动末端上固定安装有远离操作工具设置的第二进给单元,第二进给单元的驱动末端上固定安装有限定操作工具位置的上平面导向模组,将第一进给单元、第二进给单元和上平面导向模组构成的单平面导向调整模组以操作工具的中轴线所在的平面翻转则得到第三进给单元、第四进给单元和下平面导向模组构成的另一个单平面导向调整模组,此时第一进给单元和第三进给单元背向平行设置且第二进给单元和第四进给单元同向平行设置,两组单平面导向调整模组安装在壳体内构成四自由度平面导向定位模组。
12、所述的上平面导向模组包括上平面导向架,上平面导向架远离操作工具的一端固定在第二进给单元的驱动末端上、上平面导向架的另一端球形腔内布置有能够相对上平面导向架转动的上平面导向球且上平面导向球采用上平面导向球盖板限定,操作工具能够穿过上平面导向球的圆柱孔;所述的下平面导向模组包括下平面导向架,下平面导向架远离操作工具的一端固定在第四进给单元的驱动末端上、下平面导向架的另一端球形腔内布置有能够相对下平面导向架转动的下平面导向球且下平面导向球采用下平面导向球盖板限定,操作工具能够穿过下平面导向球的圆柱孔。
13、所述的四自由度平面导向定位模组还包括导向套筒,供操作工具贯穿设置的导向套筒依次穿过上平面导向球和下平面导向球上的圆柱孔,导向套筒的上部固定在上平面导向球的圆柱孔上且导向套筒能够相对下平面导向球上的圆柱孔轴向滑动、或者导向套筒的下部固定在下平面导向球的圆柱孔上且导向套筒能够相对上平面导向球上的圆柱孔轴向滑动。
14、进给单元负责提供可控的进给运动,所述的进给单元包括进给底座、进给电机、进给减速器、丝杠、丝杠滑块、进给法兰,进给底座上安装有进给电机,进给电机的输出末端安装有进给减速器,进给减速器的输出末端采用安装有丝杠滑块的丝杠,丝杠和丝杠滑块构成直线传动机构,进给法兰刚性固定在丝杠滑块作为进给单元的输出末端和安装机构。
15、所述丝杠的两侧布置有平行设置的第一平面导向轴和第二平面导向轴,丝杠滑块与第一平面导向轴和第二平面导向轴以轴孔的方式连接;所述的第一平面导向轴和/或第二平面导向轴上布置有消隙弹簧,消隙弹簧一端固定在连接法兰与丝杠滑块构成的刚性体上、另外一端固定在进给底座上,当丝杠滑块运动时消隙弹簧始终处于压缩状态,并确保消隙弹簧在最小压缩状态下仍具有弹力。
16、在工作时,第六旋转单元通过燕尾槽与第五进给单元连接,第五进给单元的进给底座与旋进支架一端刚性连接、旋进支架另一端与四自由度平面导向定位模组的壳体进行刚性连接;同时柔性传动杆的一端固定在第六旋转单元上的传动杆连接件上、另一端与操作工具刚性固定。要求,柔性传动杆与第六旋转单元上的传动杆连接件固定的那一端部中心线应与传动杆连接件的旋转轴线尽可能同轴、柔性传动杆与操作工具的固定端的端部中心线也应与操作工具的旋转轴线尽可能同轴。由此可以通过四自由度平面导向定位模组中的电机运动带动操作工具实现沿着x轴方向、y轴方向的平移运动和绕x轴、y轴的转动,同时第五进给单元可以通过柔性连接杆推动操作工具实现z轴进给,第六旋转单元可以通过柔性连接杆旋转带动操作工具实现绕z轴旋转,由此实现操作工具六自由度的操纵。
17、该柔性杆驱动的微型六自由度微创操作装置能够实现模块化组装。在五个进给单元的连接法兰和进给底座上设有尺寸一致的连接定位孔和固定螺纹,进给单元之间能够相互拼接固定,四个进给单元形成四自由度平面导向定位模组的驱动部分、剩余一个进给单元作为第五进给单元。四自由度平面导向定位模组中的两个进给单元可以根据进给轴线垂直组装构成一个单平面运动模块,两个单平面运动模块可以翻转后堆叠形成双平面运动模块,双平面运动模块再与上平面导向模组、下平面导向模组集成,从而构成一个标准的四自由度平面导向定位模组。由此,通过五个标准化的进给单元即可构成所这个微创操作装置的前5个自由度。对于第六个自由度,可以将操作工具、柔性传动杆与第六旋转单元连接后形成一个独立部件、即能够根据需要进行切换的可调换模组,根据手术操作工具需要,旋转电机需要预先构建若干不同类型旋转部件,再使用时仅需将可调换模组通过燕尾槽连接在第五进给单元的驱动末端上即可。模块化的设计降低了微创操作装置结构制造的复杂性,使其便于大批量制造,增强部件的互换性和拓展性要求。
18、一种柔性杆驱动的微型六自由度微创操作装置的使用方法,该使用方法包括控制操作工具到达目标位姿的方法,步骤如下:
19、a1、坐标系定义
20、首先进行坐标系定义,定义上平面导向球中心点o0坐标为下平面导向球中心点o1坐标为装置初始状态下的上平面导向球中心点o0与下平面导向球中心点o1位于电机上下运动行程中心,定义装置基坐标系原点位于装置初始状态下的上平面导向球中心点o0处,x轴方向朝向操作手前方、z方向垂直于四自由度平面导向定位模组所处平面且向上、y轴方向遵循右手定则;为计算方便,定义操作工具连接位置坐标系为法兰坐标系,法兰坐标系原点与四自由度平面导向定位模组的上平面导向球中心点重合;初始状态下,法兰坐标系方向与装置基坐标系重合;定义操作工具坐标系原点位于实际操作工具的作用位置,对于细长杆状的操作工具,定义操作工具坐标系原点otool位于o0与o1连线上,具体位置由otool与o0的距离l确定;
21、a2、给定操作工具目标位姿计算装置各自由度电机的目标运动位置
22、输入操作工具目标位姿,使用向量表示其中xflan、yflan、zflan分别表示操作工具末端在装置基坐标系中沿x轴、y轴、z轴的平移值,θflanψflan分别表示操作工具坐标系相对于装置基坐标系的转角;
23、则根据上述步骤a1中的坐标系定义,第一进给单元的进给值为j1=xflan、第二进给单元的进给值为j2=yflan,根据三角函数关系,第三进给单元、第四进给单元的进给值分别为:
24、
25、上式中,h为,为,θo为;
26、对于第五进给单元的进给值j5,由于柔性传动杆长度不变,柔性传动杆从第六旋转单元末端的旋转减速器输出轴到o0点的形状为空间曲线,且会随着操作工具的位置和方向改变而发生弹性改变,因此无法使用刚体计算方法直接推导出操作工具末端位置与j5之间的关系,通过计算出静止状态下操作工具末端伸长量与第五进给单元的进给值j5间的逆运动学关系获得,此时有δj5=δl,δl为操作工具末端伸长量;对于第六旋转单元的旋转值j6,由于是柔性传动杆传动,旋转自由度与导向机构是相互解耦的,因此能直接计算出j6=ψflan;
27、a3、控制电机到达目标位置
28、根据计算所得各自由度电机目标位置,控制电机运动,驱动五个进给单元和第六旋转单元驱动操作工具运动到达计算值处,此时操作工具末端的位姿即为设定的目标位姿。
29、一种柔性杆驱动的微型六自由度微创操作装置的使用方法,该使用方法还包括控制操作工具进行可调远心点运动的方法,远心点运动是指操作工具在运动过程中,操作工具轴线始终经过一个成为远心点的固定点,在微创手术时,该固定点与微创手术的创口重合,从而保证操作工具工作过程中不会牵拉到微创手术的创口通道;具体步骤如下:
30、b1、设定远心点位置
31、运动装置目标远心点frcm的位置坐标要求远心点在操作工具的运动空间内部;
32、b2、计算远心点约束系数
33、设远心点约束系数为n,则n由以下公式计算:
34、
35、上式中:其中h为上平面导向模组和下平面导向模组距离,分别为上平面导向球中心点o0和下平面导向球中心点o1的坐标;
36、b3、计算远心点运动约束位置
37、设为远心点运动中操作工具绕远心点x轴方向的旋转角、θoy为远心点运动中操作工具绕远心点y轴方向的旋转角,则当微型六自由度微创操作装置执行远心点运动时,上平面导向球中心点o0和下平面导向球中心点o1的数学关系可由下式表示:
38、
39、控制微型六自由度微创操作装置操纵上平面导向球中心点o0和下平面导向球中心点o1按以上公式计算值运动即可确保目标位置下操作工具始终经过远心点。
40、进一步的说,控制操作工具进行可调远心点运动的方法还包括远心点增量运动控制方法,具体步骤如下:以上平面导向球中心点o0为控制点,设定微型六自由度微创操作装置驱动上平面导向球中心点控制点o0运动较小增量则可根据下式计算出驱动控制下平面导向球中心点o1的运动增量:
41、
42、以该增量进行运动能够保证微型六自由度微创操作装置在增量运动过程中始终维持远心点运动,即自由调节远心点位置。
43、在本发明提供的微型六自由度微创操作装置定义的坐标系中,操作用具连接位置坐标系(法兰坐标系)位于机械装置上的固定位置;操作工具坐标系表示工具上的有效位置(针尖、夹爪中心等)的坐标,该操作工具坐标系随着操作工具的类型不同,位置有所不同。
44、本发明相比现有技术有如下优点:
45、本发明提供了一种串并联驱动机构和柔性杆驱动的小型化高精度的微型六自由度微创操作装置,实现了xy平面运动和z轴运动的机械结构解耦,可以有效降低微创操作装置的机械复杂度,实现紧凑的结构设计;该微型六自由度微创操作装置的总重量仅72g,输出力可以达到3n,具有10μm的运动分辨率,能够实现显微手术常用的钻削、穿刺、药物注射等任务。
46、本发明的微型六自由度微创操作装置提供了一种轻量级、具有足够输出力和精度的简化的六自由度操作装置的结构设计方法,在简化六自由度运动结构设计的同时,兼顾运动精度和负载能力,从而有助于实现微型化的操作装置在真正的临床显微手术中的应用。
47、本发明的微型六自由度微创操作装置给出了一种模块化的六自由度操作装置结构组装方法,可以通过标准化的模块完成装置的构建,从而降低制造成本,提升装置的可靠性和可维护性。
48、本发明的微型六自由度微创操作装置通过建立微创操作装置的正/逆运动学模型和rcm运动模型,实现有效控制,满足微创操作装置的空间定位定向操作需要。
49、本发明的微型六自由度微创操作装置提供的基于该装置的远心点运动控制方法,从而实现可调节的远心点运动,使得该装置能够根据不同的手术场景调节自身所需的远心点位置。
- 还没有人留言评论。精彩留言会获得点赞!