一种用于偏瘫患者手部运动恢复的引导式镜像康复系统
本发明属于康复设备,尤其是涉及一种用于偏瘫患者手部运动恢复的引导式镜像康复系统。
背景技术:
1、中风导致的偏瘫,是一个严重、常见的全球性健康问题。尽管医学的最新进展极大地提高了中风病例的存活率,但中风导致的偏瘫等症状,仍需要医学康复训练才能实现运动功能的康复。橙象医疗科技有限公司提出的s400手部持续被动训练系统被较为广泛的应用于神经系统疾病导致的手部运动障碍康复。该设备具有wifi无线信息传输模块,采用任务治疗的方式,且支持单根手指的康复训练。但是s400手部持续被动训练系统无法实行镜像康复,换句话说,它不能在康复过程中加入患者的主观运动意图。上海司羿智能科技有限公司设计的手功能康复机器人是国内偏瘫患者康复常用的设备。该设备可支持机械式镜像康复训练,配备有先进的虚拟现实上位机软件,以增加患者康复积极性与参与性。然而,人手是极其灵活的,上述设备只能实现粗粒度的手势运动识别,例如只能检测手指的屈伸运动,无法识别手指的内收-外展运动。目前市面上存在的偏瘫患者手部康复设备存在以下不足:
2、(1)当前商业及学术领域相关可穿戴上肢运动康复设备大多支持粗粒度任务,如手腕、前臂的运动,但对人手指关节的细粒度运动信息采集能力较弱;(2)目前的手部运动康复系统多集中于任务治疗系统的研究,即通过特定的治疗任务,使手反复运动到指定位置。然而这种治疗方案忽略了患者对手部康复的主观运动意图,无法通过患者的实时运动意向实现康复运动;(3)对于中上程度手部运动能力丧失的患者,采用如手部外骨骼等机械辅助式的康复治疗方法是比较有效的。但最近医学研究表明针对中下程度手部运动能力丧失的患者,非机械辅助的引导式辅助康复方法有助于患者运动神经系统的康复。此外,理想的手部运动辅助康复系统应具有舒适性、防水性和轻量化等特点,以便用于家庭康复。
3、因此,本研究旨在设计一款柔性可穿戴手部运动康复系统,能实现超细粒度手部运动信息采集、患者主观运动意图识别以及引导式康复治疗策略。该系统的硬件部分由一只感知手套和一只康复手套构成,分别佩戴在偏瘫患者的健康侧手和患侧手上。
技术实现思路
1、有鉴于此,本发明旨在克服现有技术中上述问题的不足之处,提出一种用于偏瘫患者手部运动恢复的引导式镜像康复系统。
2、为达到上述目的,本发明的技术方案是这样实现的:
3、一种用于偏瘫患者手部运动恢复的引导式镜像康复系统,包括感知手套、康复手套、以及上位机软件平台;
4、所述感知手套包括传感器模块、柔性电路模块、嵌入式电子系统,用于实现健康侧手部运动信息的采集;
5、所述康复手套包括传感器模块、柔性电路模块、嵌入式电子系统、端口拓展模块、震动触觉模块,用于实现患侧手的运动信息采集;
6、所述上位机软件平台用于接收来自感知手套的手部运动信息,并通过机器学习引擎对当前手势进行模式识别,上位机软件平台根据模式识别结果生成控制信号,并发送至康复手套;
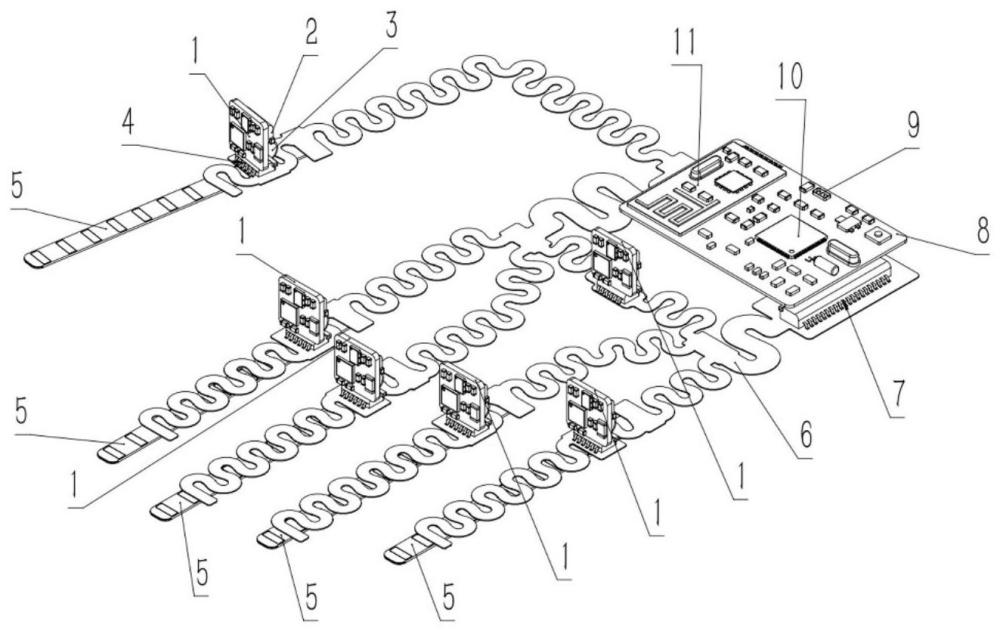
7、所述传感器模块包括6个imu模块和5个flex传感器,5个imu模块分别位于5根手指的近端指骨位置,用于检测掌指关节的屈伸运动和内收-外展运动,1个imu模块被布置在手背,用于检测手背的运动;5个flex传感器分别被布置在每根手指的近端指间关节位置,用于检测其屈伸运动;
8、所述柔性电路模块为“岛-桥结构”,各有源或无源器件被焊接在“岛”的位置实现机械解耦,蛇形柔性电路构成的“桥”实现高可拉伸性;
9、所述嵌入式电子系统包括mcu、无线传输模块、电源管理模块;
10、所述mcu与相应手套上的所有imu模块、flex传感器电性连接,康复手套上的mcu与震动触觉模块之间电性连接;震动触觉模块均与康复手套上的mcu通过端口扩展模块电性连接。
11、进一步的,所述imu模块的背面焊接有第一ffc连接器,通过第一软排线与柔性电路模块上的第二ffc连接器相连实现信息的传输;所述flex传感器、第一ffc连接器均位于柔性电路模块的单独的岛屿上。
12、进一步的,所述震动触觉模块为震动触觉执行器,所述震动触觉执行器为直径为6mm-12mm、高度为1.5mm-5mm的圆柱形,最大震动频率为60hz-300hz。
13、进一步的,所述柔性电路模块是一个三层结构的柔性印刷电路板fpcb,由两层铜层和一层聚酰亚胺薄膜(cu-pi-cu:18um-12.5um-18um)构成;柔性电路模块有五个分支,大拇指分支单独引出,四指分支整体引出后分为四条支路,每条支路均为可弹性伸缩的结构,柔性电路模块以及焊接在上面的flex传感器、第一ffc连接器或震动触觉模块都封装在厚度为2mm的固化硅胶ecoflex中,柔性电路模块通过固化硅胶ecoflex粘附在尼龙手套的背面,以方便使用者穿戴。
14、进一步的,所述mcu采用stm32f103c8t6芯片,通过i2c通讯收集imu模块的数据,通过mcu的数模转换器adc将flex传感器两端电压信号转化为数字信号;所述无线传输模块以nrf24l01及其外围电路构成,用于数据无线传输;所述电源管理模块负责稳压以及向输入电压转化为5v和3.3v,为该系统的有源器件供电;
15、所述嵌入式电子系统的基板背面通过锡膏焊接有第四ffc连接器,通过第二软排线与固定在柔性电路模块上的第三ffc连接器相连实现信息的传输;
16、所述端口拓展模块由pca9685芯片及其外围电路构成,所述端口拓展模块用于对康复手套内的mcu的pwm输出端口gpio进行拓展。
17、进一步的,每个震动触觉模块一方面与锂离子电池电性连接,端口拓展模块的每个端口连接一个mosfet管的栅极g,mosfet管的源极s和栅极g通过电感连接后接地,mosfet管的漏极d与震动触觉执行器的一端连接,同时震动触觉执行器的两端并联有二极管;锂离子电池通过电源管理模块将电源电压转换成相应的电压后,为mcu供电。
18、进一步的,所述康复手套上的嵌入式电子系统上设置程序下载端口,通过j-link仿真下载调试器将相应的治疗任务通过程序下载端口下载到康复手套的mcu。
19、进一步的,所述上位机软件平台集成有串口数据接收模块、数据分析平台和一个机器学习引擎,串口接收模块通过usb与一个具有nrf无线通讯接收功能的模块建立连接,接收来自感知手套无线通讯模块的手部运动信息,这些信息将通过数据分析平台进行数据预处理,包括数据补全、数据归一化和特征提取,并将手部运动信息以曲线的形式展现出来,机器学习引擎将接收健康侧手的运动信息,对当前患者健康侧手执行的手势进行模式识别,上位机软件平台将根据当前模式识别的结果生成控制信号,这些控制信号将通过nrf无线通讯传输至康复手套。
20、进一步的,所述imu模块采集的是掌指关节的屈伸运动和内收-外展运动,当患侧手的mcu计算对应位置的角度差时,所计算的角度差为两种运动合成后的数据,公式为:
21、
22、其中anglefe表示imu模块采集的手指屈伸运动时的角度,angleaa表示imu模块10采集的手指内收-外展运动时的角度,angle表示最终的角度差。
23、进一步的,角度差为90°时,震动频率为100hz,且震动频率不再随着角度差的增大而增大,角度差为0~90°范围内时,震动频率呈线性增加。。
24、相对于现有技术,本发明所述的一种用于偏瘫患者手部运动恢复的引导式镜像康复系统具有以下优势:
25、1、本发明可实现超细粒度的手部运动采集。本发明利用多传感器信息融合技术,通过布置惯性测量单元(imu)模块和flex传感器,可采集手部运动的41维信息。值得注意的是,国内外商业及学术领域在手部运动识别中手指的屈伸运动备受关注,而手指间的内收-外展运动通常被忽略。因此,本发明基于mpu6050芯片设计小体积imu模块,用其横滚角对手指的内收-外展运动进行识别,实现细粒度的手部运动监测。此外,模块化传感器布置的设计可针对不同患者自由搭配传感器数量及种类。
26、2、本发明可实现高精度的患者主观运动意图识别。本发明开发有集成机器学习引擎的上位机软件系统,可利用nrf无线通讯接收来自感知手套的手部运动信息并进行模式识别,以判断患者当前执行的手势。
27、3、本发明为一种引导式镜像康复系统,相较于国内现有技术,首次提出了一种基于震动触觉执行器的引导式镜像康复治疗设备。本发明可利用上述感知手套的模式识别结果生成对应的控制信号,并通过nrf无线通讯传输至康复手套。康复手套相较于感知手套,在每根手指的中间指骨和近节指骨位置布置震动触觉执行器。当患侧手对应关节位置的运动与控制信号不匹配时,对应指骨位置的震动触觉执行器就会震动(这种利用健康侧手的运动引导患侧手执行相同的动作的方式,即为镜像康复)。此外,本技术的震动触觉执行器震动频率会通过脉冲宽度调制(pwm)进行调节,当患侧手手势与控制信号越不匹配时震动越剧烈。
28、4、本发明设计同时具有机械解耦及高电路可拉伸性的“岛-桥”结构柔性电路,由两层铜层和一层聚酰亚胺薄膜(cu-pi-cu:18um-12.5um-18um)构成。所有有源及无源器件将被布置在矩形的“岛”形结构上,实现元器件之间的机械解耦。蛇形的“桥”形结构上不布置元器件,仅实现拉伸功能。利用有限元分析,在0.3%的屈服极限下,柔性电路的最大拉伸长度为23.1%,高于人体表皮最大拉伸率(约20%)。
- 还没有人留言评论。精彩留言会获得点赞!