本发明涉及牙科,尤其涉及一种基于机器视觉的重度牙槽骨缺损骨块修整形状匹配方法。
背景技术:
1、在现代口腔种植修复和重建手术中,重度牙槽骨缺损的治疗是一个复杂且挑战性极大的问题。传统方法依赖于手术医生的经验和直观判断,使用自体或异体骨移植来修复缺损。然而,这些方法存在诸多局限性和挑战,包括但不限于移植骨块与缺损区域匹配度低、手术时间长、精确度不高及可能影响患者恢复的生物力学稳定性不足。
2、现有技术的主要缺陷包括:
3、1、传统方法往往依赖医生的经验和手工测量,难以达到高度精确匹配牙槽骨缺损区域与移植骨块之间的形状,容易出现移植骨块与骨缺损受区贴合差,较差的贴合既不利于移植骨块的成活,也增加了移植骨块被坚固固定的难度,从而影响修复效果和患者的恢复。
4、2、由于缺乏有效的预测和规划工具,传统手术过程中需要反复将移植骨块放于骨缺损受区比对、试验并多次修整以适应缺损区域的形状,这不仅增加了手术时间,增加了移植骨块离体缺血时间而可能使骨块活性降低,也增加了术中移植骨块崩脱、污染的风险,还增加了患者的张口时间,从而增加了手术失败风险和患者术中的不适。
5、3、传统方法难以准确评估移植骨块与牙槽骨缺损区域之间的生物力学稳定性,这可能会导致移植失败或长期的功能障碍。
6、因此,如何提供一种基于机器视觉的重度牙槽骨缺损骨块修整形状匹配方法是本领域技术人员亟需解决的问题。
技术实现思路
1、本发明的一个目的在于提出一种基于机器视觉的重度牙槽骨缺损骨块修整形状匹配方法,本发明通过高分辨率ct扫描和先进的机器视觉技术,能够找到骨块修整的匹配方法,精确重建牙槽骨缺损区域及移植骨块的三维模型。
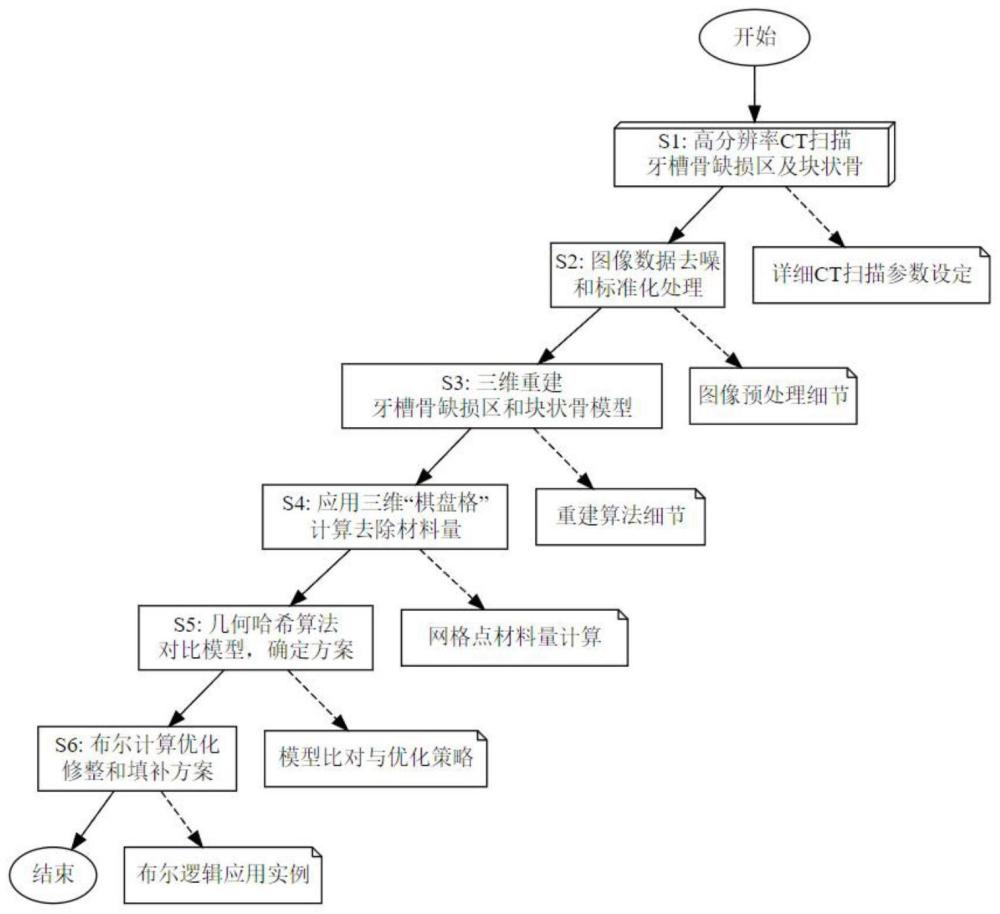
2、根据本发明实施例的一种基于机器视觉的重度牙槽骨缺损骨块修整形状匹配方法,包括以下步骤:
3、s1、使用高分辨率ct扫描设备,从多个角度扫描患者的牙槽骨缺损区域及拟取骨区域的自体块骨;
4、s2、对收集到的图像数据进行去噪和标准化处理;
5、s3、运用机器视觉技术和图像处理算法对处理后的图像数据进行三维重建,分别生成牙槽骨缺损区域三维模型和块状骨三维模型,并分析缺损区域和块状骨的形状、大小和复杂程度;
6、s4、在牙槽骨缺损区域三维模型和块状骨三维模型分别上应用三维“棋盘格”样式的网格,并计算每个网格点上所需去除的材料量,确定钻针磨削的具体参数,包括位置、深度和角度;
7、s5、利用几何哈希算法将块状骨三维模型与牙槽骨缺损区三维模型进行对比,找出块状骨的修整方案和牙槽骨缺损区的填补方案,块状骨的修整方案和牙槽骨缺损区的填补方案考虑块状骨与牙槽骨缺损区之间的接合面积、形状契合度和潜在的生物力学稳定性;
8、s6、运用布尔计算进一步优化块状骨的修整方案和牙槽骨缺损区的填补方案,最终得出最佳修整和填补方案;
9、s7、根据最佳修整和填补方案,生成详细的手术指导步骤和参数,包括切割角度、深度和具体的修整流程。
10、可选的,所述s1具体包括:
11、s11、选择具备至少256层螺旋扫描功能的高分辨率ct扫描设备,分辨率标准设定为至少0.5毫米,对于分辨率的要求,设定公式为:
12、
13、其中,r代表所需的空间分辨率,以线对/毫米为单位,dmin代表能够被分辨的最小结构尺寸;
14、s12、在扫描前,通过软体进行预扫描规划,设定扫描的具体参数,包括扫描角度、层数以及扫描区域的大小,扫描参数的设定关系由下式表示:
15、a=θ×n×d;
16、其中,a代表扫描区域的总覆盖角度,θ代表每次扫描的角度覆盖,n为扫描的总层数,d为每层扫描的厚度;
17、s13、调整患者的位姿,使得牙槽骨缺损区域及预定的自体块状骨提取区域对准ct扫描设备的中心线,使用定位带或支架固定患者位置,位姿调整结合患者的体型和扫描区域的具体情况用下式:
18、p=f(p,v,t);
19、其中,p代表最终的位姿参数,p为预期扫描位置,v为患者体积参数,t为目标区域的厚度;
20、s14、进行初始低剂量扫描获取大概的区域位置,根据初步图像调整扫描参数和患者位姿,初始低剂量扫描的效果评估由以下公式评估:
21、
22、其中,q代表图像质量的提升百分比,i0为原始图像强度,i为处理后图像强度;
23、s15、执行高分辨率扫描,从至少四个不同的角度,包括0°,90°,180°,270°进行详细扫描,每个角度扫描前都重新确认患者位姿和扫描参数;
24、s16、收集完成所有角度的扫描数据后,将患者的牙槽骨缺损区域及拟取骨区域的自体块骨数据导入到专用的图像处理软件中。
25、可选的,所述s3具体包括:
26、s31、将预处理的图像数据导入三维重建软件,基于机器视觉技术自动识别牙槽骨缺损区域和块状骨的轮廓,利用边缘检测算法分割出感兴趣区域;
27、s32、运用体素化方法将二维图像数据转换成三维空间中的点云数据,对每个体素点赋予一个密度值v:
28、v(i,j,k)=w1·i(i,j)+w2·g(i,j)+w3·c(i,j,k);
29、其中,v(i,j,k)是三维空间中点(i,j,k)的密度值,i(i,j)代表二维图像在坐标(i,j)处的灰度值,g(i,j)是图像在(i,j)处的梯度幅值,反映了该点的边缘强度,c(i,j,k)表示由相邻体素的灰度值差异引起的曲率,用于评估三维形状的局部变化,w1、w2和w3是权重系数,用于平衡不同影像特征在密度值确定中的作用;
30、s33、应用marching cubes算法,将s32步骤中得到的点云数据转化为连续的三维表面模型,计算不同点云之间的相对位置,自动构建出三维表面,生成牙槽骨缺损区域三维模型md和块状骨三维模型mb:
31、
32、其中,m表示最终的牙槽骨缺损区域三维模型md和块状骨三维模型mb表面,p代表点云数据集,h和k分别是模型表面上每点的平均曲率和高斯曲率,用于评估表面的平滑度和局部形状变化,λ1、λ2和λ3是平衡项;
33、s34、利用几何形态学分析工具,对s33步骤中生成的牙槽骨缺损区域三维模型md和块状骨三维模型mb进行形状、大小和复杂程度的分析:
34、
35、其中,sb(m)表示对牙槽骨缺损区域三维模型md和块状骨三维模型mb的几何形态学分析结果,综合评估了模型的体积、表面积以及表面的平均曲率平方的整体影响,衡量块状骨模型的形状、大小和复杂性,v(m)表示牙槽骨缺损区域三维模型md和块状骨三维模型mb的体积,a(m)代表牙槽骨缺损区域三维模型md和块状骨三维模型mb的表面积,∫mh2da是牙槽骨缺损区域三维模型md和块状骨三维模型mb表面上每点的平均曲率平方的积分,是衡量模型表面平滑度和局部形态变化的指标,高曲率区域表示模型上的尖锐或凹凸部分,αb、βb和γb系数用于平衡体积、表面积以及表面平均曲率平方对总分析结果的贡献。
36、可选的,所述s31具体包括:
37、s311、应用卷积神经网络对处理后的图像数据进行特征提取,将牙槽骨缺损区域图像和自体块状骨图像作为输入图像\i,过程通过以下公式表示:
38、
39、其中,f表示提取的特征映射,wk和b分别代表第k个卷积核的权重和偏置,ik是输入图像在第k个卷积核作用下的局部区域,relu是非线性激活函数,提供模型的非线性建模能力,bn表示批标准化操作,用于加速训练过程并提高模型稳定性,*表示卷积操作,attention(i,watt)是一个注意力机制,其中watt是学习到的注意力权重,用于强化图像中重要特征的表示并抑制不重要的部分;
40、s312、基于提取的特征向量,运用canny边缘检测,识别出牙槽骨缺损区域和块状骨的轮廓:
41、
42、其中,e表示边缘检测的结果,ix和iy分别表示图像在水平和垂直方向上的梯度,nms是非极大值抑制,用于消除边缘检测中的多余响应,保留最强的边缘信号,at(i,τlow,τhigh)是自适应阈值技术,其中τlow和τhigh分别为低阈值和高阈值,用于根据图像内容动态调整边缘检测的敏感度;
43、s313、对边缘检测后的结果应用图割算法,引入基于像素邻接关系和像素强度差异的复杂能量函数细化并准确分割出目标区域:
44、
45、其中,α和β是调节数据项和平滑项贡献的权重参数,γ控制邻接像素强度差异对平滑项影响的程度,||ipiq||2是像素p和q在强度上的差异,用于调节平滑项的影响;
46、s314、通过步骤s11-s13,得到牙槽骨缺损区域和块状骨的精确轮廓。
47、可选的,所述s4具体包括:
48、s41、在牙槽骨缺损区域三维模型md和块状骨三维模型mb上应用三维网格划分算法,生成等间距的棋盘格样式网格:
49、g(i,j,k)=(x0+i·a,y0+j·a,z0+k·a);
50、其中,g(i,j,k)代表网格中点的坐标,(i,j,k)是网格点的索引,(x0,y0,z0)是三维网格的起点坐标,a是网格的边长;
51、s42、对于每个网格点,计算相对于模型表面的距离d,并基于距离确定所需去除的材料量vremove:
52、
53、其中,ρ是材料的密度,d是网格点到模型表面的最短距离,d0是理想距离阈值,k是形状调整因子;
54、s43、根据所需去除的材料量vremove计算确定钻针磨削的具体参数,包括钻针磨削的位置pdrill、深度ddrill和角度adrill:
55、
56、
57、
58、其中,pdrill是钻针磨削的目标位置,pgrid是当前网格点的位置,是材料量梯度,指示最大材料去除方向,δx是位置微调量,ddrill是钻针磨削深度,r是钻针半径,adrill是钻针磨削角度,由材料去除量的梯度方向决定;
59、s44、重复步骤s41至s43,直到牙槽骨缺损区域三维模型md和块状骨三维模型mb上的所有网格点均被处理。
60、可选的,所述s5具体包括:
61、s51、为牙槽骨缺损区域三维模型md和块状骨三维模型mb生成独特的几何哈希值,通过分析模型的几何特征和空间分布来执行,将模型表面分割成规则的体素网格,并计算每个体素内部的点密度,为每个体素分配一个哈希值;
62、hgeo(m)=∑p∈m(ω1·curv(p)+ω2shapeindex(p)+ω3·distcentroid(p))hash(p);
63、其中,hgeo(m)表示牙槽骨缺损区域三维模型md和块状骨三维模型mb的几何哈希值,p代表模型中的一个点,ω1、ω2、ω3是权重因子,用于平衡不同几何特征在哈希值生成过程中的贡献,curv(p)计算点p的曲率,反映了模型表面在p点处的弯曲程度,shapeindex(p)是点p的形状指数,是一个几何属性,用于描述局部表面形状的特征,distcentroid(p)表示点p到模型质心的距离,用于捕获模型的空间分布特征,hash(p)是对点p的位置应用一个哈希函数,生成一个独特的数值标识符;
64、s52、使用几何哈希值对两个模型的体素进行快速匹配,找出匹配度高的体素对,体素对的匹配度通过比较模型的哈希值来确定,对于匹配的体素对,计算它们的空间对齐参数,优化模型之间的位置关系;
65、
66、其中,δ是一个比较函数,根据哈希值的相似度返回一个评分,ω是一个权重函数,依据空间对齐参数α和形状匹配参数β调整每个体素对匹配的贡献;
67、s53、基于匹配度和空间对齐参数,制定块状骨的修整方案和牙槽骨缺损区的填补方案,包括确定需要移除或添加材料的具体区域以及计算修整和填补操作的最佳深度和角度;
68、修整方案为如何调整块状骨三维模型以最佳地匹配牙槽骨缺损区域:
69、
70、其中,rscheme表示修整方案,md和分别表示牙槽骨缺损区域模型和经过旋转角度θ,ψ调整的块状骨模型,λ是评价两模型匹配程度的函数,综合接合面积、形状契合度和潜在的生物力学稳定性,ω是考虑材料去除量vremove和添加量vadd的成本函数。
71、填补方案为如何将调整后的块状骨模型最佳地整合到牙槽骨缺损区域:
72、
73、其中,fscheme表示填补方案,sd是牙槽骨缺损区域表面,mmatch表示块状骨与牙槽骨缺损区匹配度的测量,是块状骨表面点与最近的牙槽骨缺损区域表面点之间的距离差异,α和β是权衡匹配度和接合间隙的系数。
74、可选的,所述s6具体包括:
75、s61、基于已确定的修整方案rscheme和填补方案fscheme,将块状骨三维模型md和块状骨三维模型mb进行布尔运算处理,应用布尔差集运算模拟块状骨模型的修整和布尔并集运算来模拟缺损区填补;
76、定义模型修整的变形映射函数和填补的变形映射函数,通过布尔运算将过程结合:
77、修整映射函数:
78、
79、其中,是基于修整方案角度的旋转矩阵,是基于修整方案位置向量的平移矩阵。
80、填补映射函数:
81、
82、其中,scale(vadd)根据添加材料量vadd调整模型尺寸的缩放矩阵;
83、布尔运算优化模型:
84、
85、其中,mfinal代表经过修整和填补后得到的最终模型,表示布尔差集运算,用于从块状骨模型中去除相应的材料量,表示布尔并集运算,用于将修整后的块状骨模型添加到牙槽骨缺损区域;
86、s62、对mfinal进行几何和拓扑检查,确认修整和填补过程没有引入任何非物理的几何特性和拓扑错误,几何特性包括过度的锐角或非实际的悬挂结构,拓扑错误包括孔洞或自相交的表面,引入几何完整性评估函数gintegrity和拓扑完整性评估函数\(t_{integrity}\),分别评估修正后模型的几何特性和拓扑结构:
87、几何完整性评估:
88、
89、其中,κ(d)是定义在模型表面mfinal上每点的局部曲率函数,τ(s)是定义在模型边界上的曲率函数;
90、拓扑完整性评估:
91、
92、其中,χ(mfinal)是模型的欧拉特征数,反映模型的拓扑复杂度,hi(mfinal)是第i个孔洞的拓扑影响评估;
93、s63、评估mfinal与原始牙槽骨缺损区域md之间的接合质量,包括接合面积、形状契合度和潜在的生物力学稳定性:
94、
95、其中,a(mfinal∩md)是修整和填补后模型与原始牙槽骨缺损区域的接合面积,是在接合区域每个点p处模型mfinal表面与md的法向量差异的度量,s(mfinal,md)是一个评估生物力学稳定性的函数;
96、s64、根据接合质量评估结果,对修整方案和填补方案进行微调,包括对修整深度、角度或者填补材料的分布进行微小的调整,得到得出最佳修整和填补方案。
97、本发明的有益效果是:
98、(1)本发明通过高分辨率ct扫描和先进的机器视觉技术,能够找到骨块修整的匹配方法,精确重建牙槽骨缺损区域及移植骨块的三维模型。与传统手工测量和匹配方法相比,能够大幅提高修复过程中的形状匹配精度,确保移植骨块与缺损区域之间的无缝对接,这对于改善手术结果和加快患者恢复具有重要意义。
99、(2)本发明的几何哈希算法和布尔计算步骤优化了修整和填补方案,大幅减少了手术过程中对匹配方案的试错时间,有效缩短了手术时间。
100、(3)本发明通过对修整和填补后模型的几何与拓扑特性进行细致分析,确保了修复区域在生物力学上的稳定性和耐用性,不仅提高了移植成功率,还有助于维持长期的功能性恢复,减少了患者日后可能需要的再次手术。