一种基于智能定位的自跟随急救箱的制作方法
本发明涉及医疗救援,尤其涉及一种基于智能定位的自跟随急救箱。
背景技术:
1、急救箱是用于应对意外伤害和突发疾病的紧急医疗设备,是户外和家庭中必不可少的医疗用品,其中包含各种药品、敷料、止血带等医疗用品,在紧急救援场景或急救过程中,及时、准确的提供医疗救助对于伤者的生命安全至关重要。
2、中国专利公开号:cn207429282u,公开了一种具有自移动功能的医疗救援箱,包括主箱体,主箱体的顶部通过连接扣与封盖活动连接,封盖的顶部固定连接有手提把手,主箱体的底部固定连接有底座,底座内壁的顶部与电动推杆的一端固定连接,电动推杆的另一端与升降板的顶部固定连接,升降板的底部开设有固定槽。该具有自移动功能的医疗救援箱,通过驱动电机、第一齿轮、第二齿轮、旋转轴、第一连接板、轴承、第二连接板和滚轮的设置,使医疗救援箱可以实现自移动的功能,这样解决了现有的医疗设备救援箱,在使用的时候都是都过医护人员手提的方式进行移动的问题,从而使医疗救援箱在使用的时候更 方便,从而提高医疗救援的效率,由此可见,现有技术中,急救箱通常是由医护人员携带,或者放置在医院、救护车或救援站等地方的固定位置处,然而,在需要对多人进行救治或进行长距离迁移救治时,其缺乏智能化跟随功能,大多无法自动识别并跟随需要救助的目标或实施救助的人员,从而难以在紧急情况下及时达到施救人员身边为其提供有效救援帮助,容易导致施救人员错过对所需施救人员的最佳救助时机,针对以上缺陷,急需开发一种具备自动跟随目标,提供及时救助的急救箱。
技术实现思路
1、为此,本发明提供一种基于智能定位的自跟随急救箱,用以克服现有技术中传统急救箱缺乏智能跟随功能,难以在紧急情况下跟随施救人员或到达需施救人员身边的问题。
2、为实现上述目的,本发明提供一种基于智能定位的自跟随急救箱,包括,
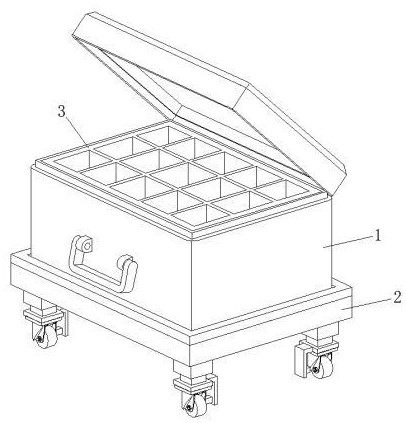
3、急救箱本体,其用于放置急救用品;
4、自跟随底板,其设置于所述急救箱本体的底部,用以带动所述急救箱本体跟随施救人员或所需施救人员进行移动;
5、所述急救箱本体的内部设置有分隔置物层,将急救箱本体分隔为上部的储药层和下部的储物层;
6、其中,所述储药层用于对各种用于急救的药物进行存储,所述储物层用于对各类用于急救的工具进行存储,且分隔置物层内设置有若干储药格,用于辅助对各种用于急救的药物进行分类存储;
7、所述自跟随底板包括用以带动急救箱本体进行移动的移动底盘,和用以控制移动底盘进行移动的主控系统,所述移动底盘通过设置于其底部的四个移动轮组带动急救箱本体进行移动;
8、其中,所述主控系统内设置有用于控制所述急救箱本体进行转向、移动以及升降的控制模块和用于规划急救箱本体的跟随路径的中控处理模块;
9、所述中控处理模块通过微处理单元对所述跟随路径进行模拟规划,并通过定位模块获取周边环境信息,对跟随路径进行实时优化,以辅助所述主控系统控制所述急救箱本体进行避障,并通过设置于中控处理模块内的各判定单元对急救箱本体所处的实时位置进行判定,以确定是否需要向外进行报警。
10、进一步地,所述移动轮组包括升降杆、万向轮、驱动模组和转向模组;
11、其中,所述万向轮设置于所述升降杆的升降端,升降杆的另一端与所述移动底盘的下表面相连;
12、所述驱动模组与所述万向轮相连,用于驱动万向轮进行转动;
13、所述转向模组与升降杆相连,用以控制万向轮进行转向。
14、进一步地,所述主控系统包括:
15、定位模块,其用以对所述急救箱本体的实时位置进行定位与反馈;
16、所述控制模块,其与所述移动轮组相连,用以对所述急救箱本体的移动进程进行控制;
17、报警模块,其用于向外界发送报警信息,辅助外界对所述急救箱本体进行回收定位;
18、所述中控处理模块,其与所述定位模块、所述控制模块以及所述报警模块分别相连,用以根据所述急救箱本体的实时位置信息对其跟随路径进行规划,并对急救箱本体是否正常根据跟随路径进行移动进行判定,以对是否控制报警模块向外界报警进行确定;
19、进一步地,所述定位模块包括自定位模块和超声传感模块。
20、其中,所述自定位模块用以对所述急救箱本体的自身位置的实时位置信息与所需施救人员或施救人员本身的实时位置信息进行获取;
21、所述超声传感模块用于对所述周边环境信息进行获取,以辅助所述中控处理模块对所述跟随路径进行实时优化。
22、进一步地,所述控制模块包括方向控制模块、驱动控制模块以及升降控制模块;
23、其中,所述方向控制模块用于根据所述跟随路径对所述转向模组进行控制,以控制所述急救箱本体进行转向;
24、所述驱动控制模块用于根据所述跟随路径控制所述驱动模组进行开启或关闭,以对所述急救箱本体是否进行移动进行控制;
25、所述升降控制模块用于根据所述跟随路径对所述升降杆的升降高度进行控制,以对所述急救箱本体与地面之间的高度进行调整控制。
26、进一步地,所述中控处理模块包括:
27、所述微处理单元,其用于根据所述急救箱本体的实时位置信息与所需施救人员或施救人员本身的实时位置信息对所述跟随路径进行模拟规划,并根据所述周边环境信息对模拟规划出的跟随路径进行实时优化,以辅助急救箱本体对跟随路径上的障碍物进行规避。
28、所述微处理单元为能够实时对定位模块处所采集到的实时位置信息进行处理分析的微型处理器;
29、进一步地,所述中控处理模块还包括:
30、第一判定单元,其用以对所述急救箱本体的本身位置信息进行判定;
31、第二判定单元,其用以对所述急救箱本体与所需施救人员或施救人员本身之间的实时距离进行判定;
32、其中,所述第一判定单元包括用以对所述急救箱本体的第一判定距离进行采集的第一采集子单元和用以对采集到的第一判定距离进行判定的第一判定子单元;
33、所述第二判定单元包括用以对所述急救箱本体的第二判定距离进行采集的第二采集子单元和用以对采集到的第二判定距离进行判定的第二判定子单元。
34、进一步地,所述第一判定单元内设置有预设采集周期,所述第一采集子单元能对所述急救箱本体在预设采集周期起始时与终止时所处两位置处的位置信息进行采集,对急救箱本体在预设采集周期起始时与终止时所处两位置在水平方向上的位移距离进行计算,作为所述第一判定距离;
35、所述第二采集子单元能对所述急救箱本体与所需施救人员或施救人员本身在水平方向上的直线距离进行采集,作为第二判定距离。
36、进一步地,所述第一判定单元内还设置有第一预设判定距离,所述第一判定子单元将所述第一判定距离与第一预设判定距离进行对比;
37、若所述第一判定距离大于所述第一预设判定距离,则将对下一预设采集周期的第一判定距离进行采集和判定;
38、若所述第一判定距离小于等于所述第一预设判定距离,则将通过所述第二判定单元对所述第二判定距离进行判定。
39、进一步地,所述第二判定单元内设置有第二预设判定距离,若所述第一判定距离小于等于所述第一预设判定距离,则将通过所述第二判定子单元将所述第二判定距离与第二预设判定距离进行对比;
40、若所述第二判定距离大于所述第二预设判定距离,则将通过所述报警模块向外界进行报警,以辅助外界人员对其定位。
41、与现有技术相比,本发明的有益效果在于,通过分隔置物层使急救箱本体能有效分类存储药物和工具,方便快速取用,提高救援效率,同时通过在分隔置物层处开设相应的储药格,以方便施救人员根据相应药效对不同作用的急救药物进行分类存储,进一步提高其救援效率,通过集成了主控系统和移动底盘的自跟随底板带动急救箱本体进行灵活移动,使其实现主动跟随,以确保救援物资可以及时送达,辅助施救人员进行救助,通过主控系统的存在使得急救箱能实时定位自身和目标施救人员的位置,并通过控制移动轮组进行升降或转动以控制急救箱本体对障碍物及时进行规避,从而使其实现精确跟随,提高救援效率。
42、进一步地,通过升降杆、万向轮、驱动模组和转向模组的共同配合,对移动底盘的移动机制进行完善,使得急救箱本体在移动时更加稳定且可控,能够适应不同地形。
43、尤其,通过在主控系统内集成的定位模块、控制模块、报警模块以及中控处理模块,使其可以根据急救箱的实时位置对急救箱的移动路径与移动方式进行分析与控制,以使急救箱能根据跟随路径跟随施救人员进行移动。
44、进一步地,通过将自定位模块和超声传感模块进行结合,使得所形成的定位模块在具有自定位功能的同时还具有环境感知功能,以对周边环境的地形信息进行获取,辅助优化跟随路径,使得急救箱能够根据环境信息实时避障,并调整路径。
45、尤其,通过设置的方向控制模块、驱动控制模块以及升降控制模块,使得该控制模块可以通过相应的控制模块控制急救箱做出相应的操作,为其根据跟随路径及时控制急救箱对路径上的障碍物进行规避提供了实现基础。
46、进一步地,通过微处理单元根据自定位模块所采集到的实时位置信息进行处理分析,对急救箱本体到所需施救人员或施救人员本身处所需移动的移动路径进行实时模拟与规划,作为其跟随所需施救人员或施救人员本身进行移动的跟随路径,并根据急救箱本体周边的周边环境信息对模拟规划出的跟随路径进行实时优化,使急救箱本体可以根据周边环境信息及时对跟随路径上所可能存在的障碍物进行规避。
47、尤其,通过第一判定单元和第二判定单元分别对急救箱本体自身移动距离和其与施救人员之间的距离进行判定,以对是否需要通过报警模块向外进行报警进行确定,使急救箱可以在适当时候发出报警,提醒施救人员注意安全距离,从而尽量避免急救箱本体与施救人员之间的距离超出预设的安全范围之外。
48、进一步地,通过第一采集子单元和第一判定子单元对急救箱的实时位置进行监控,以对急救箱是否长期处于同一区域进行判定。
49、尤其,通过第二采集子单元和第二判定子单元对已确定长期处于同一区域时的急救箱本体与施救人员之间的距离进行判定,以决定是否需要进行报警,并通过报警模块对急救箱本体与施救人员之间的距离超出预设的安全范围时进行报警,辅助外界人员对其进行定位和回收,为后续施救过程的正常进行做出保障。
- 还没有人留言评论。精彩留言会获得点赞!