一种反刍动物瘤胃的电子胶囊及其甲烷定位驻留方法
本发明涉及畜牧养殖技术,尤其涉及一种反刍动物的瘤胃电子胶囊及其甲烷定位驻留方法。
背景技术:
1、反刍动物消化系统有四个胃:瘤胃、网胃、瓣胃和皱胃,其中瘤胃被称为天然发酵罐,主要负责发酵和分解食物中的纤维素和其它难消化的物质,将食物中的复杂碳水化合物转化为简单的有机酸和气体,测量瘤胃中各生理参数可以判断反刍动物健康状况,评估饲料的消化利用效率,优化饲料配方和饲养管理方案。
2、在2020年文献《反刍家畜胃肠道甲烷排放与减排策略》中提到,反刍家畜胃肠道甲烷产生的部位为瘤胃和后肠道,其中瘤胃约占胃肠道甲烷生成量的 80% 以上,因此瘤胃的甲烷浓度将显著高于肠胃道中其它部位的甲烷浓度。
3、电子胶囊作为一种植入式产品,可以直接测量消化道生理参数。目前电子胶囊已经实现了视觉检测和对压力、温度、ph、气体、葡萄糖等众多参数的测量。但是这些胶囊大多数依靠肠胃道蠕动而不受控制的被动运动,无法在胃中长期驻留、测量。而可以主动控制电子胶囊运动使其在胃中长时间停留的方式大多是通过外部磁场驱动实现的,这限制了电子胶囊受体生物的运动范围,为长期测量带来了不便。
4、目前文献中报道的可在胃中驻留的电子胶囊大多数是通过ph敏感材料(如明胶膜、胃溶衣)在胃中溶解从而释放驻留机构。但是由于此类材料溶解时间受体内胃液ph值和膜厚度两种因素影响,膜厚度通常在微米级,加工误差较大;同时生物体内胃液ph值并不是一个定值,甚至同一生物不同时段的ph值也不相同;因此这种方式在体内定位释放不准确。此外,目前的驻留装置通常是依赖材料被动降解或外部设备无线触发的方式进行解体。材料被动降解的方式解体时间过长;外部设备无线触发的方式难以精准把握解体时间,过早解体则使得测量不充分,过晚则可能因电子胶囊能量耗尽导致无法触发解体;这极大地增加了梗阻风险。
技术实现思路
1、针对现有技术中存在的上述问题,本发明提供一种反刍动物瘤胃电子胶囊及其甲烷定位驻留方法,以期实现在反刍动物消化道中精准定位瘤胃并进行驻留,而且能够在完成测量任务后及时解体。
2、本发明为达到上述发明目的,采用如下技术方案:
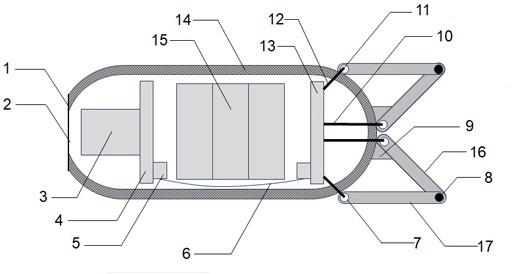
3、本发明一种反刍动物瘤胃的电子胶囊的特点包括:驻留装置、主体外壳、测量电路板、主控电路板;
4、在主体外壳的一端外侧设置有所述驻留装置,所述驻留装置为可折叠的双臂结构,任意一侧的单臂均是由一根内侧连接杆与一根外侧连接杆通过扭转弹簧连接而成,两根连接杆的另一端上均设置连接孔,并分别由一根长导电丝线和一根短导电丝线穿过连接孔将两根连接杆与主控电路板连通;其中,与连接孔接触部分的导电丝线为保险丝;当扭转弹簧受扭矩作用而发生弹性形变时,四根导电丝线将驻留装置固定在主体外壳上,从而形成驻留装置的折叠状态;
5、所述主体外壳的另一端开设有气体交换孔,并在所述气体交换孔上覆盖有一层聚四氟乙烯隔水透气膜1;
6、所述主体外壳的内部安装放置有纽扣电池、测量电路板、主控电路板;所述测量电路板与主控电路板通过两个对应连接的fpc连接器与fpc连接线进行电气连接;
7、所述测量电路板包括:第一稳压芯片u1、甲烷传感器u2、第二稳压芯片u3、第一连接器cn1、电容c1、电容c2、电容c3、电容c4、pnp型三极管q1和pnp型三极管q2;
8、所述第一稳压芯片u1的in引脚和en引脚均连接第一连接器cn1的1号引脚和电容c2, 所述第一稳压芯片u1的out引脚与电容c1连接;
9、所述第二稳压芯片u3的in引脚和en引脚均连接第一连接器cn1的1号引脚和电容c4,所述第二稳压芯片u3的out引脚连接电容c3;
10、所述甲烷传感器u2的4号引脚与第一稳压芯片u1的out引脚连接,所述甲烷传感器u2的3号引脚与第二稳压芯片u2的out引脚连接,
11、所述甲烷传感器u2的2号引脚与第一连接器cn1的4号引脚连接,并通过电阻r1与pnp型三极管q2的发射极连接;所述pnp型三级管q2的基极与第一连接器cn1的3号引脚连接;
12、所述甲烷传感器u2的1号引脚与pnp型三极管q1的发射极连接;所述pnp型三级管q1的基极与第一连接器cn1的2号引脚连接;
13、所述第一连接器cn1的5号引脚分别与第一稳压芯片u1、第二稳压芯片u3的gnd引脚和pnp型三极管q1、q2的集电极连接;
14、所述主控电路板包括:电源接口u5、第三稳压芯片u4、第二连接器cn2、微控制器u6、无源晶振x1、swd接口电路、电量监测电路、电容c5、电容c6、电容c7、电容c8;
15、所述电源接口u5的vbat引脚与纽扣电池的正极相连,所述电源接口u5的gnd引脚与纽扣电池的负极相连;
16、所述第三稳压芯片u4的in引脚与en引脚均连接电源接口u5的vbat引脚和电容c6;所述第三稳压芯片u4的out引脚连接电容c5;
17、所述第二连接器cn2的1号引脚连接第三稳压芯片u4的out引脚;
18、所述第二连接器cn2的2号引脚连接微控制器u6的gpio2引脚;
19、所述第二连接器cn2的3号引脚连接微控制器u6的gpio1引脚;
20、所述第二连接器cn2的4号引脚连接微控制器u6的adc1引脚;
21、所述第二连接器cn2的5号引脚连接电源接口u5的gnd引脚;
22、所述无源晶振x1分别与微控制器u6、电容c7、电容c8相连;
23、所述微控制器u6的adc2引脚与电量监测电路相连;
24、所述微控制器u6的gpio3引脚、gpio4引脚分别与两根长导电丝线连接;
25、所述微控制器u6的gpio5引脚、gpio6引脚分别与两根短导电丝线连接;四根导电丝线的另一端均接地;
26、所述微控制器u6与swd接口电路相连;
27、当甲烷传感器u2所采集到的甲烷浓度达到所设置的阈值时,微控制器u6将两根短导电丝线中间部分与连接孔接触的保险丝熔化,以释放双臂结构中的一对外侧连接杆,从而形成驻留装置的驻留状态;
28、当微控制器u6经过电量监测电路检测到纽扣电池电量不足时,微控制器u6将两根长导电丝线中间部分与连接孔接触的保险丝熔化,使得驻留装置中的一对内侧连接杆脱离主体外壳,从而形成驻留装置的解体状态。
29、进一步地,本发明所述的反刍动物瘤胃的电子胶囊的特点也在于,驻留装置采用可降解合成高分子医用材料,所述电子胶囊主体外壳采用不可降解合成高分子医用材料。
30、进一步地,本发明一种反刍动物瘤胃电子胶囊的甲烷定位驻留方法的特点是按如下步骤进行:
31、步骤1、通过预实验测量目标反刍动物的瘤胃甲烷浓度,并根据得到的瘤胃甲烷浓度设置检测阈值m;
32、步骤2、反刍动物吞咽所述电子胶囊;
33、步骤3、利用所述甲烷传感器u2实时测量体内甲烷浓度m,并输出响应电压给所述微控制器u6,所述微控制器u6通过adc1引脚将所述响应电压进行转化后,得到体内甲烷浓度m,并与m进行比较;若m≥m,则表示所述电子胶囊到达反刍动物的瘤胃,并执行步骤4;否则,返回步骤3继续测量;
34、步骤4、所述微控制器u6的gpio5、gpio6引脚输出高电平,以熔化两根短导电丝线中间部分与连接孔接触的保险丝,使两根短导电丝线断开,从而释放扭转弹簧存储的弹性势能,使得双臂结构中的一对外侧连接杆弹出,驻留装置膨胀扩展至大于贲门、瘤网胃口的几何尺寸,以实现驻留;
35、步骤5、所述微控制器u6的adc2引脚经电量监测电路获取纽扣电池(15)的电压,并根据纽扣电池的电量电压关系,计算得到纽扣电池的电量c,若c≤τ,则表示所述电子胶囊的电量不足,并执行步骤6;否则,返回步骤5继续测量,其中,τ表示电量阈值;
36、步骤6、所述微控制器u6的gpio3、gpio4引脚输出高电平,以熔化两根长导电丝线中间部分与连接孔接触的保险丝,使两根长导电丝线断开,驻留装置脱离主体外壳,从而实现解体并排出体外。
37、与现有技术相比,本发明的有益效果在于:
38、1、本发明根据反刍动物瘤胃中甲烷浓度显著高于消化道其它部位甲烷浓度的特点,进行定位并释放驻留装置,从而提高了在瘤胃中定位驻留的精准度;
39、2、本发明将定位原理与电子胶囊生理参数测量相结合,不需要增加额外的定位器件,节约了电子胶囊内部空间;
40、3、本发明通过微控制器的adc2引脚经电量监测电路监测纽扣电池电量,当电池电量不足时触发驻留装置解体,不需要体外触发,从而在确保电子胶囊完成测量任务的同时,降低了因解体不及时导致的肠梗阻风险。
- 还没有人留言评论。精彩留言会获得点赞!