一种穿刺定位补偿方法、装置以及穿刺机器人系统与流程
本技术涉及医疗器械运动控制,特别是涉及一种穿刺定位补偿方法、装置以及穿刺机器人系统。
背景技术:
1、传统的经皮介入穿刺手术是医生在ct机设备引导下,将小型手术器械,如穿刺针送入患者体内,对病变部位进行检测或治疗的一种微创手术。经皮介入微创穿刺手术与其他微创手术一样,具有创面小。康复快和术后并发症少等优点。在进行经皮穿刺时,医生通过病灶附近的二维或三维扫描图像判断合适的入针点和入针方向,然后凭借经验通过手动调整穿刺通道完成穿刺操作,常规的x射线透视下穿刺需要医生根据ct机x射线的图像反复多次手动调整操作才能将穿刺针准确穿刺患者体内。
2、穿刺诊疗针对不同的部位其需要解决的问题相对来说是一致的,目前常用的治疗手段是基于体外图像引导的微创穿刺手术,如穿刺活检、消融等,该方法具有创伤小、疼痛轻、恢复快等优点,也是恶性肿瘤诊断与治疗的重要手段之一。但该方法存在徒手穿刺精度低、不可视、遭受辐射时间长、易引发并发症等问题,手术效果严重依赖医生的经验。因此希望借助机器人技术解决穿刺诊疗中的痛点问题。
3、相关技术中,随着现代工业技术的发展,已经出现了能够辅助医师进行穿刺处理的机器人,通过机器人的辅助效果,提高穿刺手术的流程完成效率,并降低在手术过程中医职人员的介入时间,从而在保证手术效果的基础上降低对医职人员的伤害。
4、然而,目前的穿刺定位方法,存在如下的技术问题:
5、目前的穿刺定位方法通过对穿刺机器人的关节控制实现定位穿刺,但是调节机构存在较多的被动传动链,导致姿态控制的精度较低。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种能够提高穿刺定位的精度的一种穿刺定位补偿方法、装置以及穿刺机器人系统。
2、第一方面,本技术提供了一种穿刺定位补偿方法。所述方法包括:
3、获取目标对象的影像数据,根据所述影像数据确定待处理目标的目标位置信息以及环境约束条件,所述环境约束条件基于所述影像数据中的非相关目标确定;
4、根据所述目标位置信息以及所述环境约束条件确定穿刺方位;
5、基于所述目标位置信息以及所述穿刺方位对穿刺执行设备进行逆向运动求解,得到轨迹规划信息,所述轨迹规划信息包括所述穿刺执行设备各关节的关节指令位置;
6、获取所述穿刺执行设备的运动中反馈的关节实际位置;
7、基于所述关节实际位置与所述关节指令位置之间的方位误差,对所述穿刺方位的定位指令以及定位方位进行补偿。
8、在其中一个实施例中,所述基于所述关节实际位置与所述关节指令位置之间的方位误差,对所述穿刺方位的定位指令以及定位方位进行补偿包括:
9、若所述方位误差小于预设的误差阈值,则基于当前的所述穿刺方位进行所述穿刺执行设备的穿刺控制;
10、若所述方位误差大于或等于所述误差阈值,则对所述定位指令以及所述定位方位进行补偿。
11、在其中一个实施例中,所述基于所述关节实际位置与所述关节指令位置之间的方位误差,对所述穿刺方位的定位指令以及定位方位进行补偿包括:
12、基于补偿更新后的所述定位指令以及所述定位方位驱动所述穿刺执行设备;
13、在所述穿刺执行设备的驱动中进行多次循环补偿,直至达到预设的循环补偿次数阈值,或所述定位指令以及所述定位方位满足预设的定位稳定性约束条件。
14、在其中一个实施例中,所述基于所述目标位置信息以及所述穿刺方位对穿刺执行设备进行逆向运动求解,得到轨迹规划信息之前还包括:
15、根据所述穿刺执行设备的结构参数确定所述执行设备的数字结构模型,所述数字结构模型包括主动关节、被动关节以及末端执行器;
16、根据所述数字结构模型对所述末端执行器的运动轨迹进行仿真模拟,得到所述运动约束条件;
17、根据所述运动约束条件确定所述末端执行器的逆向运动学关系,所述逆向运动学关系如下式所示:
18、
19、其中向量q为所述主动关节的位置,为所述末端执行器的位置,为穿刺方向的旋转矩阵,其中所述旋转矩阵可以如下式所示:
20、
21、其中,roll为横滚轴角度,pitch为俯仰轴角度。
22、在其中一个实施例中,所述基于所述关节实际位置与所述关节指令位置之间的方位误差,对所述穿刺方位的定位指令以及定位方位进行补偿包括:
23、获取所述方位误差,所述方位误差e如下式所示:
24、
25、其中,分别为所述关节实际位置对应的被动关节转动角度,分别为所述关节指令位置对应的被动关节转动角度;
26、基于所述方位误差,对所述穿刺方位的定位指令以及定位方位进行补偿,补偿后的所述定位方位如下式所示:
27、
28、其中,分别为补偿后的所述定位方位对应的角度。
29、在其中一个实施例中,所述获取目标对象的影像数据,根据所述影像数据确定待处理目标的目标位置信息以及环境约束条件,所述环境约束条件基于所述影像数据中的非相关目标确定包括:
30、获取所述目标对象的多个所述影像数据,将所述影像数据映射至预设的空间坐标系内进行配准处理,得到配准转换影像;
31、基于所述配准转换影像确定所述目标位置信息以及所述环境约束信息。
32、第二方面,本技术还提供了一种穿刺定位补偿装置。所述装置包括:
33、图像处理单元,用于获取目标对象的影像数据,根据所述影像数据确定待处理目标的目标位置信息以及环境约束条件,所述环境约束条件基于所述影像数据中的非相关目标确定;
34、穿刺方位单元,用于根据所述目标位置信息以及所述环境约束条件确定穿刺方位;
35、轨迹规划单元,用于基于所述目标位置信息以及所述穿刺方位对穿刺执行设备进行逆向运动求解,得到轨迹规划信息,所述轨迹规划信息包括所述穿刺执行设备各关节的关节指令位置;
36、位置反馈单元,用于获取所述穿刺执行设备的运动中反馈的关节实际位置;
37、定位补偿单元,用于基于所述关节实际位置与所述关节指令位置之间的方位误差,对所述穿刺方位的定位指令以及定位方位进行补偿。
38、在其中一个实施例中,所述定位补偿单元包括:
39、省略补偿单元,用于若所述方位误差小于预设的误差阈值,则基于当前的所述穿刺方位进行所述穿刺执行设备的穿刺控制;
40、补偿处理单元,用于若所述方位误差大于或等于所述误差阈值,则对所述定位指令以及所述定位方位进行补偿。
41、在其中一个实施例中,所述定位补偿单元包括:
42、穿刺驱动单元,用于基于补偿更新后的所述定位指令以及所述定位方位驱动所述穿刺执行设备;
43、循环补偿单元,用于在所述穿刺执行设备的驱动中进行多次循环补偿,直至达到预设的循环补偿次数阈值,或所述定位指令以及所述定位方位满足预设的定位稳定性约束条件。
44、在其中一个实施例中,所述轨迹规划单元之前还包括:
45、数字模型单元,用于根据所述穿刺执行设备的结构参数确定所述执行设备的数字结构模型,所述数字结构模型包括主动关节、被动关节以及末端执行器;
46、运动仿真单元,用于根据所述数字结构模型对所述末端执行器的运动轨迹进行仿真模拟,得到所述运动约束条件;
47、运动关系单元,用于根据所述运动约束条件确定所述末端执行器的逆向运动学关系,所述逆向运动学关系如下式所示:
48、
49、其中向量q为所述主动关节的位置,为所述末端执行器的位置,为穿刺方向的旋转矩阵,其中所述旋转矩阵可以如下式所示:
50、
51、其中,roll为横滚轴角度,pitch为俯仰轴角度。
52、在其中一个实施例中,所述定位补偿单元包括:
53、方位误差单元,用于获取所述方位误差,所述方位误差e如下式所示:
54、
55、其中,分别为所述关节实际位置对应的被动关节转动角度,分别为所述关节指令位置对应的被动关节转动角度;
56、误差补偿单元,用于基于所述方位误差,对所述穿刺方位的定位指令以及定位方位进行补偿,补偿后的所述定位方位如下式所示:
57、
58、其中,分别为补偿后的所述定位方位对应的角度。
59、在其中一个实施例中,所述图像处理单元包括:
60、影像配准单元,用于获取所述目标对象的多个所述影像数据,将所述影像数据映射至预设的空间坐标系内进行配准处理,得到配准转换影像;
61、目标确认单元,用于基于所述配准转换影像确定所述目标位置信息以及所述环境约束信息。
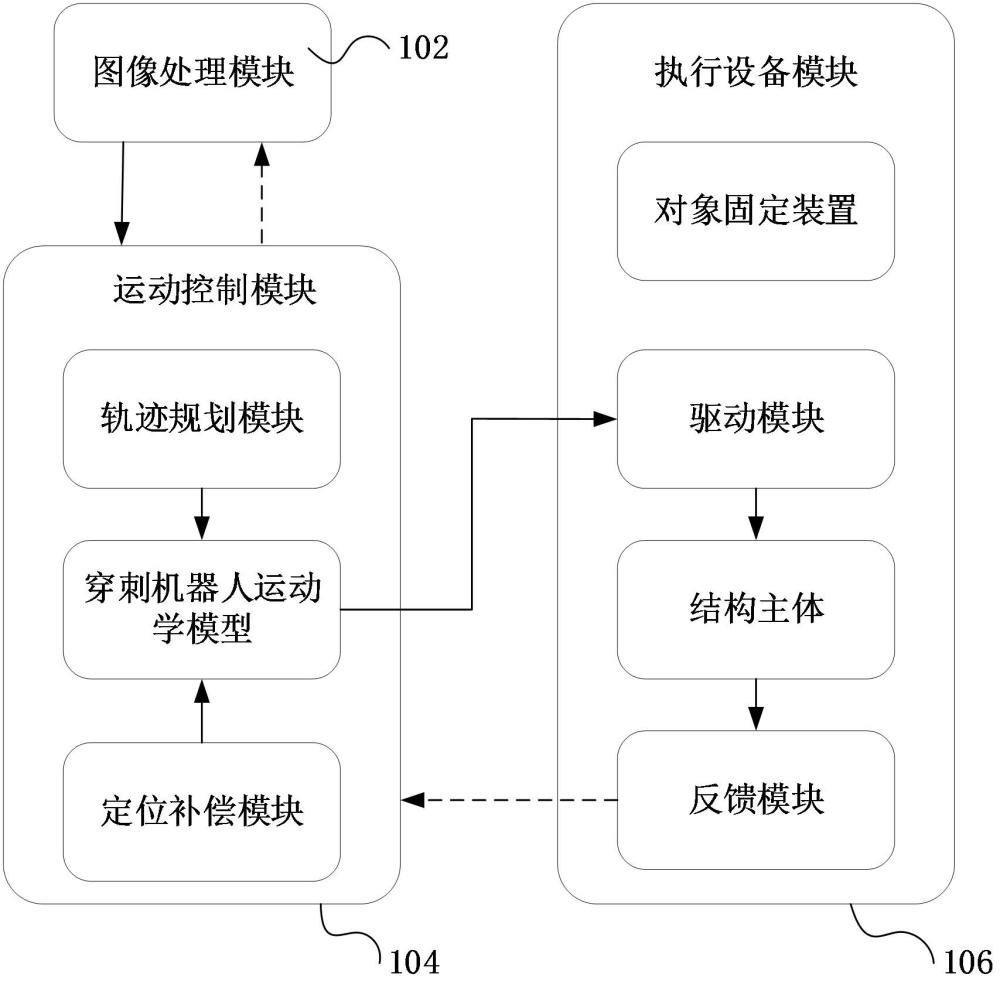
62、第三方面,本技术还提供了一种穿刺机器人系统,所述系统包括:
63、图像处理模块,用于接收并处理目标对象的影像数据;
64、运动控制模块,用于接收所述目标对象的影像数据,并根据如第一方面中任意一项所述的一种穿刺定位补偿方法生成并输出运动控制指令,并实时反馈运动状态信息;
65、执行设备模块,用于接收所述运动控制指令,并根据所述运动控制指令指示的穿刺路径完成穿刺作业。
66、第四方面,本技术还提供了一种计算机设备。所述计算机设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现如第一方面中任意一项实施例所述的一种穿刺定位补偿方法中的步骤。
67、第五方面,本技术还提供了一种计算机可读存储介质。所述计算机可读存储介质,其上存储有计算机程序,所述计算机程序被处理器执行时实现如第一方面中任意一项实施例所述的一种穿刺定位补偿方法中的步骤。
68、第六方面,本技术还提供了一种计算机程序产品。所述计算机程序产品,包括计算机程序,该计算机程序被处理器执行时实现如第一方面中任意一项实施例所述的一种穿刺定位补偿方法中的步骤。
69、上述一种穿刺定位补偿方法、装置、计算机设备、存储介质和计算机程序产品,通过权利要求书中的技术特征进行推导,能够达到对应背景技术中的技术问题的有益效果:
70、本技术提供了一种穿刺定位补偿方法,包括获取目标对象的影像数据,根据影像数据确定待处理目标的目标位置以及穿刺过程中的环境约束条件,此时根据目标位置信息以及环境约束条件可以确定穿刺方位,随后可以根据目标位置信息以及穿刺方位对穿刺执行设备进行逆向运动求解,从而得到轨迹规划信息,轨迹规划信息中就包含了在整个穿刺执行设备的运动中各关节的关节位置控制指令,关节位置控制指令对应了在指令规划下各个关节的关节指令位置,在运动驱动的过程中,关节在运动中可以通过反馈获取穿刺关节的实际位置,从而根据关节实际位置与关节指令位置之间的误差对穿刺方位的定位指令进行补偿。在实施中,通过对穿刺执行设备各个关节的关节指令位置以及关节实际位置误差的反馈、补偿,有助于提高穿刺方位的定位指令以及定位方位的精确度,降低系统误差对穿刺精度的负面影响,提高最终的穿刺介入手术的操控精准度。
- 还没有人留言评论。精彩留言会获得点赞!