一种介入全麻手术机控呼吸与暂停转换远距离控制装置
本发明涉及医疗麻醉器械,尤其涉及一种介入全麻手术机控呼吸与暂停转换远距离控制装置。
背景技术:
1、麻醉机属于半开放式麻醉装置,它主要由麻醉蒸发罐、流量计、折叠式风箱呼吸机、呼吸回路(含吸、呼气单向活瓣及手动气囊)、波纹管路等部件组成。麻醉呼吸回路系统是将麻醉机的气体输出口与病人呼吸道相连通形成一个回路,通过麻醉呼吸回路系统将新鲜气体和吸入麻醉药输送到病人的呼吸道内,并将病人呼出的气体排除到体外。
2、麻醉呼吸回路系统主要由apl阀、呼气和吸气活瓣、二氧化碳吸收罐、风箱、球囊、单向阀和机控/手控按钮以及其他附属管路组成。麻醉呼吸回路原理为:麻醉机输出的混合新鲜气体可进入吸气管路,吸气管路连接带有吸气活瓣的吸气螺纹管,吸气螺纹管连接麻醉面罩,麻醉面罩同时并联有带有呼气活瓣的呼气螺纹管,呼气螺纹管连接呼气管路,呼气管路和吸气管路之间连通二氧化碳吸收罐。呼吸机的风箱用于驱动气体流向病人肺泡、以便进行气体交换,如图1所示。
3、以上麻醉呼吸回路系统中的机控/手控按钮可以控制换向阀动作。当按下手控按钮,就表示机器进行“手动呼吸”状态,麻醉机上有球囊连接口来连通球囊,不断按压球囊来人工通气从而实现患者的手动呼吸。当按下机控按钮,就表示机器进入“自动呼吸”状态,无需手动按压球囊就能机械的使病人得以呼吸,机控时apl阀和球囊会被系统排出在外,机控时apl阀调整至“全开”状态,apl阀为限压阀。
4、基于以上背景,目前随着介入手术的逐年增多,麻醉医生经常要在介入手术间完成全麻手术,患者处于全身麻醉状态,患者呼吸由麻醉机控制,这需要麻醉医生在麻醉机前进行监护和操作,无法远程控制麻醉机。
5、而部分介入手术在手术过程中需要患者进行介入放射造影,这就要患者暂停呼吸约1分钟,造影后立刻恢复呼吸。进而需要麻醉医生提前进入介入手术房间按下手控开关,将机控呼吸转换成手控呼吸,从而实现患者呼吸暂停,然后紧急离开手术室、室内随即开始造影。待完成介入放射造影后,为保证患者安全,麻醉医生需要再紧急进入介入手术室、及时将手控呼吸转换成机控呼吸。
6、在一台介入手术中可能需要多次进行造影,麻醉医生频繁进出介入手术室来进行机控/手控切换操作,不仅给麻醉医生造成紧张心理和体力影响,又有辐射危险,而且还会影响手术的连贯性、耽误手术进程,最重要的是延长了患者处于无呼吸状态的时间,不利于患者安全。目前尚无办法实现麻醉机手控/机控按钮的远程转换,因此在介入手术室外能远距离操控满足介入手术的短暂停呼吸状态,是一件使临床获益的方法。
7、为实现麻醉机的远程操控,专利公开号cn204815250u公开了一种手术间可实现远程控制的麻醉机,麻醉机布置在手术间,控制器布置在控制间,麻醉机和控制器之间通过有线连接或无线连接实现信号传递,该方式能实现麻醉机的远程控制,但是需要从源头、在仪器设计制造时就需要对麻醉机进行改造。
技术实现思路
1、本发明为了解决目前机控呼吸/手控呼吸的切换需要麻醉医生进入介入手术室房间现场操作,额外增加了患者无呼吸时间,增加了麻醉医生的工作量和辐射的可能性以及影响手术进程的问题,提供一种介入全麻手术机控呼吸与暂停转换远距离控制装置,无需麻醉医生频繁进出手术室,麻醉医生在介入手术室可视玻璃窗外轻松进行远距离操控,便捷实现机控/手控呼吸的转换,能够减少患者无呼吸时间,同时保证手术的效率。
2、为实现上述目的,本发明所采用的技术方案是:
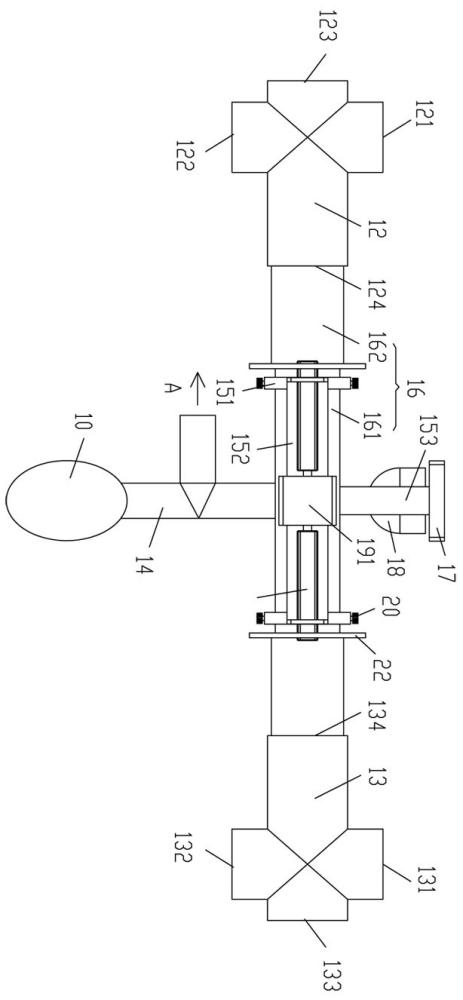
3、一种介入全麻手术机控呼吸与暂停转换远距离控制装置,安装在带有呼气管路、吸气管路、呼气螺纹管、吸气螺纹管和球囊连接口的麻醉机上,包括吸气四通管、呼气四通管、三通管路、安装框架、伸缩管阀、远程控制器和摄像头以及同步伸缩机构;
4、所述吸气四通管竖向的两端口分别连通所述吸气管路和吸气螺纹管,吸气管路和吸气螺纹管之间的连通由伸缩管阀控制,所述呼气四通管的竖向的两端口分别连通所述呼气管路和呼气螺纹管,呼气管路和呼气螺纹管之间的连通也由伸缩管阀控制;吸气四通管和呼气四通管之间排布有所述三通管路,三通管路的三个端口分别连通有球囊、所述球囊连接口和伸缩管阀;
5、所述安装框架和麻醉机壳体连接,方便为安装框架提供支撑基础,安装框架内设置有两端封闭的所述伸缩管阀,伸缩管阀端口是封闭的,但是其两端侧壁有开口,伸缩管阀为两端伸缩的管体结构,伸缩管阀两端沿轴向同步向外或向内移动,方便实现伸缩管阀的长短调整,伸缩管阀两端的侧壁上分别开设有用于连通有呼气管路和吸气管路的通孔,通孔就是以上所说的侧壁上的开口,伸缩管阀两端的所述通孔分别伸入至吸气四通管和呼气四通管横向相对应的一端口内,吸气四通管和呼气四通管横向相对应的另一端口封闭,这相当于是三通管,但不是三通管的结构;
6、所述安装框架上还设置有所述远程控制器、用于控制伸缩管阀同步伸缩移动的同步伸缩机构以及用于监控伸缩管阀运动的摄像头,所述摄像头和同步伸缩机构分别和远程控制器连接,方便对摄像头和同步伸缩机构的运行进行远程控制。
7、进一步地,所述吸气四通管竖向的两端口分别为吸气管路接口和吸气螺纹管接口,吸气四通管通过所述吸气管路接口和吸气管路连通,吸气四通管通过所述吸气螺纹管接口和所述吸气螺纹管连通;
8、所述吸气四通管横向的两端口分别为封闭口一和敞开口一,所述伸缩管阀一端部通过所述敞开口一滑动插入至所述吸气四通管内。
9、进一步地,所述呼气四通管和吸气四通管左右对称排布,呼气四通管竖向的两端口分别为呼气管路接口和呼气螺纹管接口,呼气四通管通过所述呼气管路接口和呼气管路连通,呼气四通管通过所述呼气螺纹管接口和呼气螺纹管连通;
10、所述呼气四通管横向的两端口分别为封闭口二和敞开口二,所述伸缩管阀另一端部通过所述敞开口二滑动插入至所述呼气四通管内。
11、进一步地,所述伸缩管阀包括固定管和滑动设置在固定管两端的滑动管,所述固定管两端敞口,方便和滑动管连通,固定管固定穿设在安装框架内,固定管两端向外延伸、伸出安装框架,方便连接滑动管,避免滑动管的运动受到安装框架的干涉;
12、所述滑动管一端封闭且布设有所述通孔,通孔为长条孔,保证较大的通气量,滑动管另一端套设在固定管外,伸缩管阀上的两个滑动管封闭的一端分别滑动插入至吸气四通管和呼气四通管内,方便实现对四通管的隔断,并能方便气体的换向流动。
13、进一步地,所述安装框架两侧均设置有所述同步伸缩机构,为伸缩管阀的长短调整提供动力,同步伸缩机构包括双出轴电机、螺纹杆和推拉长套,所述双出轴电机的两根输出轴上分别同轴设置有所述螺纹杆,螺纹杆轴向和伸缩管阀轴向一致;
14、两个所述螺纹杆上的螺纹旋向相反,两个螺纹杆上分别螺纹连接有所述推拉长套,推拉长套为非圆柱体,避免了推拉长套自身的转动,保证其只能轴向移动,两个推拉长套和两个滑动管一一对应,每个推拉长套的一端部穿过安装框架连接至相对应的滑动管上,方便推拉长套带动滑动管移动。
15、进一步地,所述安装框架上方布设所述远程控制器和用于监测滑动管运动的摄像头,远程控制器和所述摄像头上下排布,布局更加紧凑合理。
16、通过上述技术方案,本发明的有益效果是:
17、本发明结构设计合理,相比于现有的麻醉呼吸回路系统而言,在吸气管路和吸气螺纹管之间加装吸气四通管,在呼气管路和呼气螺纹管之间加装呼气四通管。同时在呼气四通管之间和吸气四通管之间布置长度可调的伸缩管阀,而且球囊连接口通过三通管路连通有球囊和伸缩管阀,伸缩管阀在安装框架的支撑下保持位置固定。
18、本发明的伸缩管阀起到阀门的作用,伸缩管阀两端缩回时,吸气管路和吸气螺纹管、呼气管路和呼气螺纹管正常连通,麻醉机处于机控呼吸状态。伸缩管阀两端伸长时,吸气管路和吸气螺纹管、呼气管路和呼气螺纹管不再连通,反而是在伸缩管阀的作用下,相当于将吸气管路和呼气管路直接连通,这样麻醉机就处于手控呼吸状态,这时相当于暂停患者呼吸,给介入手术创造条件。
19、本发明的同步伸缩机构的双出轴电机带动两个螺纹旋向相反的螺纹杆运转,与之匹配的两个推拉长套会同步带动伸缩管阀两端相互靠近或远离,方便实现伸缩管阀的长短调整。同步伸缩机构受控于远程控制器,麻醉医生可以手术室外远程控制同步伸缩机构的动作,从而调整伸缩管阀的长度,以此便捷实现麻醉机机控呼吸和手控呼吸的远程切换,摄像头能方便控制伸缩管阀的运行状态,保证临床安全。
20、本发明可实现麻醉医生在特殊手术室环境下、远程操控麻醉机实现机控状态和手控状态的切换,方便了对麻醉机的控制。麻醉医生无需来回进出手术室,节省了的精力和体力,降低麻醉医生的工作的繁琐性和辐射暴露机率,同时极大减小了对手术进程的影响,也缩短了患者无呼吸的时间,减少患者的风险,保证了患者安全。
- 还没有人留言评论。精彩留言会获得点赞!