一种基于双雷达的非接触式动态平衡能力评估方法及装置与流程
本发明涉及主动健康医疗装备领域,尤其是涉及一种基于双雷达的非接触式动态平衡能力评估方法及装置。
背景技术:
1、老年人衰老直接导致认知障碍困难和步态异常增加。有研究表明,阿尔茨海默氏症和帕金森氏症等神经退行性疾病,往往与老年人步态异常增加有着直接联系。帕金森氏症的老年人,往往会走小而杂乱的步伐,并且应对起步、转身和停止等动作会遇到困难。老年人步态动作异常与跌倒风险有关。
2、传统的预测老年人跌倒风险的手段是借助医院临床医生对老年人平衡能力测试进行量表评分,且量表评分的结果易受临床医生的主观性影响。为了降低这些因素的影响,实现居家养老情况下疾病的预防,减轻伤害负担,研发智能家庭健康监护系统的意义不言而喻。与临床医生量表评分相比,非接触式传感器可以提供一个标准化的训练过程,客观记录训练过程中的重心轨迹、速度、停顿时间等数据。这些数据可用于建立老年人运动功能的量化评估模型,帮助医师更准确地获得患者的跌倒风险的变化趋势,并提出针对性的预防措施方法。
3、现有的非接触式传感器量化评估如专利cn201610278688.9多体位压力平衡评估系统所示,通过信号采集单元从多个压力传感点上采集多个电信号,根据多个电信号获得压力数据,处理单元对压力数据进行预处理后进行特征提取,并进行平衡评估数据的特征选择。这种方法受限于活动所到之处需要压在压力传感点上,受限于活动空间和面积,成本随着传感点数增加而增加,无法做到家庭场景中全屋覆盖。
4、另一种方案是如专利cn202211627976.2一种基于可穿戴的便携式平衡评估装置,采用常见不同尺码大小的鞋垫或者鞋子作为数据采集模块,可穿戴,需要老人佩戴特殊的鞋子或者他人辅助穿戴,以及存在电池充电等问题,可以作为科研应用,但不适用长期连续采集评估。
技术实现思路
1、为了克服现有技术的不足,本发明的目的之一在于提供一种无需压在压力传感点上并且不需要佩戴特殊设备,隐私性好的基于双雷达的非接触式动态平衡能力评估方法。
2、为了克服现有技术的不足,本发明的目的之二在于提供一种无需压在压力传感点上并且不需要佩戴特殊设备,隐私性好的基于双雷达的非接触式动态平衡能力评估设备。
3、本发明的目的之一采用如下技术方案实现:
4、一种基于双雷达的非接触式动态平衡能力评估方法,包括以下步骤:
5、设备设置:在墙壁和屋顶分别安装一个雷达,记录墙壁上所装雷达的安装高度以及房间高度;
6、墙壁上所装雷达数据采集:墙壁上所装雷达工作并非接触采集从身体反射回来的人体点云图像,聚类分类,并根据墙壁上所装雷达的安装高度判断当前人体处于站、坐、卧、行的姿态情况;
7、屋顶上所装雷达数据采集:屋顶上所装雷达工作并非接触采集从人体顶部反射回来的人体点云数据,根据雷达点云数据进行人体目标位置定位,以获取人体回波信号在单帧状态下的所有点云的位置坐标和多普勒信息;将点云坐标的球坐标系转化为笛卡尔坐标系;基于多普勒频移的聚类,提取出各帧点云数据中人体的质心位置;
8、数据处理:根据已经判断的姿态以及跟踪质心时间序列,记录人体处于静止站立状态时的站立时间和站立位置;记录人体处于坐下状态时的坐下时间和坐下位置;记录人体处于卧倒状态时的睡眠时间以及睡眠姿态;记录人体处于行走状态时的行走时间,并计算步长、步速、重心、步行时间、转弯时间、徘徊时间;
9、动态平衡能力评估:根据站立时间、站立位置、坐下时间、坐下位置、睡眠时间、睡眠姿态、行走时间、步长、步速、重心、步行时间、转弯时间、徘徊时间特征,对照动态平衡能力量表评估结果,利用机器学习模型回归拟合,得到不同能力等级分类结果;
10、结果显示及预警:将分类结果显示至移动端并根据分类结果进行预警以及趋势判断。
11、进一步的,所述基于双雷达的非接触式动态平衡能力评估方法应用于家庭房间场景。
12、进一步的,在所述设备设置步骤中,所述墙壁和屋顶安装的雷达均为毫米波雷达。
13、进一步的,在所述设备设置步骤中,所述墙壁雷达安装高度为人体身高的1/3至2/3。
14、进一步的,在所述设备设置步骤中,所述屋顶雷达安装于房顶的中心位置处。
15、进一步的,所述基于双雷达的非接触式动态平衡能力评估方法还包括参数设置步骤,所述参数设置步骤位于所述墙壁上所装雷达数据采集步骤之前,所述参数设置具体为设置人体的高度,便于人体姿态判断。
16、进一步的,在屋顶上所装雷达数据采集步骤中,基于多普勒频移的聚类具体为:在人体动态轨迹测量应用场景中,由人类呼吸、心跳和小手臂摆动引起的微多普勒效应会产生多普勒频移较小的点云数据,通过设置适当的多普勒阈值来减少微运动,从而去除频移较小的点对聚类结果的干扰。
17、进一步的,在动态平衡能力评估步骤中,利用机器学习模型回归拟合具体为:将站立时间、站立位置、坐下时间、坐下位置、睡眠时间、睡眠姿态、行走时间、步长、步速、重心、步行时间、转弯时间、徘徊时间特征数据集用作机器学习定量模型的输入,并使用k-fold交叉验证对数据进行分块,通过机器学习对动态平衡能力运动参数进行评估和分析,以获得模型预测分数。
18、本发明的目的之二采用如下技术方案实现:
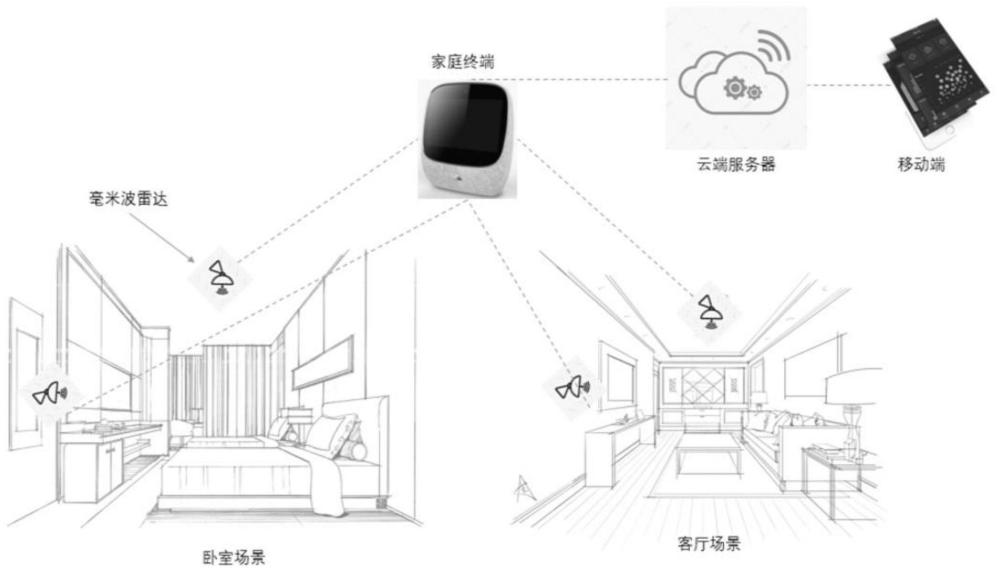
19、一种基于双雷达的非接触式动态平衡能力评估装置,用于实施上述任意一种基于双雷达的非接触式动态平衡能力评估方法,所述基于双雷达的非接触式动态平衡能力评估装置包括两雷达、家庭终端、云端服务器以及移动端,一所述雷达安装于墙壁以连续非接触采集从身体反射回来的人体点云图像,另一所述雷达安装于屋顶以连续非接触采集从人体顶部反射回来的人体点云数据,所述家庭终端与两所述雷达通信连接,所述家庭终端与所述云端服务器通信连接,所述云端服务器与所述移动端通信连接,两所述雷达采集的数据汇总至所述家庭终端并进行处理以获得动态平衡能力评估,并将动态平衡能力评估结果传输至所述云端服务器以及所述移动端。
20、相比现有技术,本发明基于双雷达的非接触式动态平衡能力评估方法通过在墙壁和屋顶分别安装一个雷达,墙壁上所装雷达工作并非接触采集从身体反射回来的人体点云图像,聚类分类,并根据墙壁上所装雷达的安装高度判断当前人体处于站、坐、卧、行的姿态情况;屋顶上所装雷达工作并非接触采集从人体顶部反射回来的人体点云数据,根据雷达点云数据进行人体目标位置定位,以获取人体回波信号在单帧状态下的所有点云的位置坐标和多普勒信息;将点云坐标的球坐标系转化为笛卡尔坐标系;基于多普勒频移的聚类,提取出各帧点云数据中人体的质心位置;根据已经判断的姿态以及跟踪质心时间序列,记录人体处于静止站立状态时的站立时间和站立位置;记录人体处于坐下状态时的坐下时间和坐下位置;记录人体处于卧倒状态时的睡眠时间以及睡眠姿态;记录人体处于行走状态时的行走时间,并计算步长、步速、重心、步行时间、转弯时间、徘徊时间;根据站立时间、站立位置、坐下时间、坐下位置、睡眠时间、睡眠姿态、行走时间、步长、步速、重心、步行时间、转弯时间、徘徊时间特征,对照动态平衡能力量表评估结果,利用机器学习模型回归拟合,得到不同能力等级分类结果,通过上述步骤能够实现动态平衡能力评估时无需压在压力传感点上并且不需要佩戴特殊设备,隐私性好、连续性好,适用于日常生活。
- 还没有人留言评论。精彩留言会获得点赞!