一种新型智能导盲杖
本发明涉及视障人群出行器械,尤其涉及一种新型智能导盲杖。
背景技术:
1、目前,盲人出行的方式靠普通导盲杆、导盲犬或监护人的带领。普通导盲杆需要盲人的绝对感知来判断道路的走向且需要走专门的盲人道,在出现盲人道被占用的情况下,很难辨别道路;导盲犬需要经过专门的训练来达到导盲的作用,其训练成本较高,而且有些场合并不适合导盲犬的出现;监护人的带领则需要监护人随时陪同,这样大大浪费了人力和时间。随着社会的老龄化的加剧,记忆力减退,腿脚不便的老年人普遍存在,他们的出行受到各界的广泛关注;
2、此出行方式存在以下缺陷:
3、1)视障人士出行时需要一手牵着导盲犬,一手拿着拐杖,一旦盲人携带东西的话行动十分不便。
4、2)导盲犬价格昂贵而且在一些公共场所可能会受到限制,例如乘坐公共交通工具,进入餐厅等。
5、3)导盲犬只可在常用路段内对使用者进行导航(如:从家到公司)。
6、为此,设计一种新型智能导盲杖,用于对上述技术问题提供另一种技术方案。
技术实现思路
1、基于此,有必要针对上述技术问题,提供一种新型智能导盲杖,用于解决背景技术中提出的技术问题。
2、为了解决上述的技术问题,本发明采用了如下技术方案:
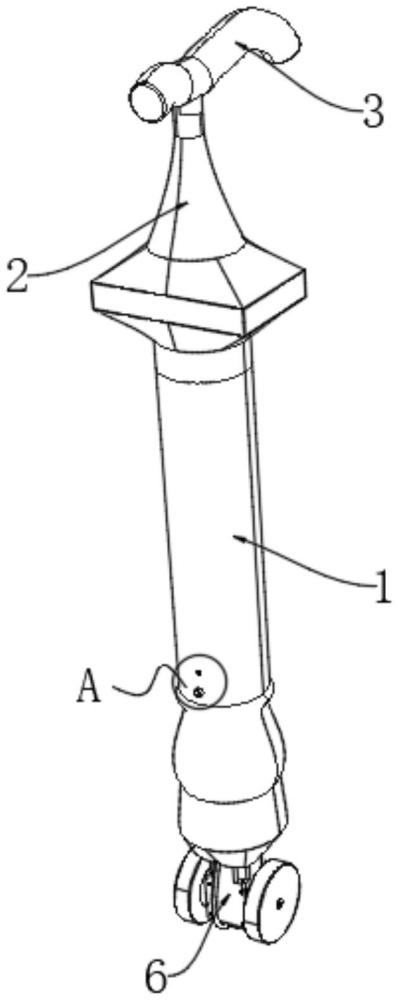
3、一种新型智能导盲杖,包括第一壳体,所述第一壳体的顶部连接有第二壳体,所述第二壳体的顶部固定有握柄,所述第一壳体内部的底端固定有第二级步进电机,所述第二级步进电机的输出端连接有固定架,所述固定架的内侧设置有第一级步进电机,所述第一级步进电机的输出端连接有双轴转向减速机,所述双轴转向减速机的两端均固定有车轮,所述第一壳体一侧的底部固定有摄像头和雷达,所述雷达位于摄像头的底部,所述第二壳体的内部固定有控制模块。
4、作为本发明提供的所述的一种新型智能导盲杖的一种优选实施方式,所述第一壳体、第二壳体和握柄的材质均为abs。
5、作为本发明提供的所述的一种新型智能导盲杖的一种优选实施方式,所述固定架包括固定板、端角定位板和侧边定位板,所述固定板的顶部与第二级步进电机的输出端连接,所述固定板底部的四个端角均固定有端角定位板,所述固定板的两端均固定有侧边定位板。
6、作为本发明提供的所述的一种新型智能导盲杖的一种优选实施方式,所述控制模块上固定有人体传感器和蜂鸣器,且蜂鸣器位于人体传感器的一端,所述控制模块与摄像头之间、控制模块与雷达之间、控制模块与第一级步进电机之间、控制模块与第二级步进电机之间均通过导线连接。
7、作为本发明提供的所述的一种新型智能导盲杖的一种优选实施方式,所述控制模块的内部设置有单片机、避障模块、定位模块、语音模块、人体感应模块、组网模块和驱动模块;
8、所述驱动模块用于控制第一级步进电机和第二级步进电机是否进行工作;
9、所述单片机用于进行控制避障模块、定位模块、语音模块、组网模块、驱动模块、人体感应模块、电源、摄像头以及蜂鸣器是否进行工作;
10、所述避障模块用于检测第一壳体的周围是否存在障碍物;
11、所述定位模块用于对导盲杖以及使用者的位置进行定位;
12、所述语音模块用于让使用者通过语音交互方式实现控制导盲杖,具体为智能语音交互模块;
13、所述人体感应模块用于对导盲杖周围是否存在行人进行检测;
14、所述组网模块用于将数据在控制模块与手机之间进行无线输送以及通信;
15、所述驱动模块用于控制第一级步进电机和第二级步进电机的工作。
16、作为本发明提供的所述的一种新型智能导盲杖的一种优选实施方式,所述第一壳体与第二壳体之间安装有用于连接的装配机构,所述装配机构包括第一连接件、第一定位环、第一紧固螺栓、第二定位件、第二定位环和第二紧固螺栓,所述握柄底端的内部滑动连接有第一连接件,所述握柄底端的外侧滑动连接有第一定位环,所述第一定位环的内部滑动连接有第一紧固螺栓,所述第一定位环的一端贯穿第一连接件和握柄与第一连接件螺纹连接;所述第一壳体顶端的内部滑动连接有第二定位件,所述第一连接件底端的外侧与第二定位件螺纹连接,所述第一壳体顶端的外侧滑动连接有第二定位环,所述第二定位环的内部均布滑动连接有第二紧固螺栓,所述第二紧固螺栓的一端贯穿第二定位环和第一壳体与第二定位件螺纹连接。
17、作为本发明提供的所述的一种新型智能导盲杖的一种优选实施方式,所述第一定位环与第二定位环外侧的两端均安装用于固定的定位机构,所述定位机构包括半圆壳、升降滑板和定位块,所述半圆壳的内侧与第一定位环和第二定位环滑动连接,所述半圆壳内侧的顶部和底部均滑动连接有定位块,顶部所述定位块与第一定位环滑动连接,底部所述定位块与第二定位环滑动连接,所述半圆壳内部的顶端和底端均滑动连接有升降滑板,且所述定位块与升降滑板固定。
18、作为本发明提供的所述的一种新型智能导盲杖的一种优选实施方式,顶部所述定位块底部的一端和底部所述定位块顶部的一端均开设有挤压斜面。
19、作为本发明提供的所述的一种新型智能导盲杖的一种优选实施方式,所述定位机构包括导向柱、压簧、滑动柱、旋转六角块、第一定位柱和第二定位柱,两个所述升降滑板两端之间均滑动连接有导向柱,顶端所述升降滑板的顶部和底端所述升降滑板的底部且位于导向柱的外侧均固定有压簧,所述压簧与半圆壳固定,所述半圆壳顶端和底端的内部均滑动连接有滑动柱,所述半圆壳的顶端和底端均设置有旋转六角块,且所述滑动柱与旋转六角块固定,所述滑动柱与升降滑板滑动连接,顶部所述滑动柱的底端固定有第一定位柱,所述第一定位柱的底部螺纹连接有第二定位柱,所述第二定位柱与底部所述滑动柱固定。
20、可以毫无疑义地看出,通过本技术的上述的技术方案,必然可以解决本技术要解决的技术问题。
21、同时,通过以上技术方案,本发明至少具备以下有益效果:
22、本发明提供的一种新型智能导盲杖,能够在使用时,通过摄像头与雷达的配合获取周围障碍物信息和前方路况信息,同时由控制模块控制第一级步进电机和第二级步进电机的工作,实现第一级步进电机的工作让导盲杖实现牵引行走,并通过第二级步进电机的工作实现让两个车轮中,一个悬空一个接触地面,形成牵引时的拐弯,进而便于让需要导盲杖的人员更加便捷,同时能够应用在多种场所,同时省去视障人士运用导盲杖探路过程,便于通过第一壳体移动时的牵引引导前行;
23、在使用时,通过摄像头和雷达的配合识别并沿盲道行驶,使得使用者可以不再像使用传统盲道那样去靠脚部感受盲道,同时通过双轴转向减速机的安装极大地提高了智能拐杖的灵活性和稳定性,完美延长了拐杖的使用寿命,进而便于为更多视障人士带去一片“光明”,从而巧妙完美地将多重功能结合于一拐杖,极大地提高了视障人士出行的便捷性和安全性;
24、通过第一连接件、第一定位环、第二定位件、第二定位环和定位机构的配合,从而能够将第一连接件和第一定位环在握柄底部内外对应的位置安装,并通过第一紧固螺栓进行连接固定,同时将第二定位件和第二定位环在第一壳体顶部内外对应的位置安装,并通过第二紧固螺栓进行连接固定,从而通过定位机构中两个半圆壳的对称安装,对第一定位环与第二定位环两个接触物体进行固定稳固,进而能够在维修时可进行便于检修;
25、通过定位块、压簧、第一定位柱和第二定位柱的配合,使得半圆壳位于第一定位环和第二定位环的外侧进行挤压时,让定位块通过挤压斜面在受压后带动升降滑板移动,进而带动压簧压缩,此时让两个半圆壳对称安装在第一定位环与第二定位环接触时的外侧后,让定位块通过与第一定位环以及第二定位环的滑动连接进行定位,并在取下时,通过反向转动两个旋转六角块,让第一定位柱与第二定位柱进行反向转动实现脱离,进而让两个升降滑板的反向移动带动对应的定位块脱离第一定位环或者第二定位环。
- 还没有人留言评论。精彩留言会获得点赞!