耦合关节模组和单孔连续体手术器械
本发明涉及医疗器械,具体涉及一种耦合关节模组和单孔连续体手术器械。
背景技术:
1、与多孔手术相比,单孔手术对器械的自由度、灵活性、刚度和稳定性都提出了更高的要求,普通的单孔手术器械在弯曲状态下刚度和负载会变弱,在微创手术场景中,器械的尺寸、操作空间和弯曲半径均受到约束的前提下,要使器械同时具备高灵活性和高刚度是一个具有挑战性的问题。
2、相关技术中,一些变刚度器械通常具有肘关节,通过设置肘关节来增加器械执行过程的灵活性,然而肘关节的弯曲也使得器械前端无法与插入通道齐平,限制了操作空间,同时手术器械前端只具有3个自由度,缺乏足够的灵活性。为进一步适应单孔手术的微创手术场景,现有的单孔器械基于传统的变刚度手术器械进行优化改进,通过肘关节和肩关节的弯曲实现插入套管内的器械转向。
3、然而,目前的单孔器械关节弯曲呈口字型,该结构设计使其占据了较大的空间,弯曲过程的灵活性较差,难以应用于狭窄腔道内,使用场景受限,难以满足对刚度和工作空间要求较高的微创手术场景的使用需求。
技术实现思路
1、针对相关技术中的不足,本技术提供了一种耦合关节模组和单孔连续体手术器械,解决了单孔手术器械因关节设计存在缺陷,导致器械应用的灵活性受限的问题。
2、为实现以上目的,本发明通过以下技术方案予以实现:
3、第一方面,本技术实施例提供了一种耦合关节模组,该耦合关节模组包括两个以上的关节件、柔性牵引骨架和刚性骨架;两个以上的关节件沿自身轴向成型有贯通的一个第一通道和多个第二通道;关节件包括贯序啮合的第一子关节、第二子关节和第三子关节,且相邻的两者成型有第一啮合部和第二啮合部,第一啮合部绕自身轴向转过预设角度后的第一中间体与第二啮合部一致;
4、柔性牵引骨架包括第一绳索件和第二绳索件,第一绳索件被构造为使其受驱动件的牵引并经由第一通道向远端延伸以连接功能件,第二绳索件中的多个绳索经由多个第二通道延伸至两个以上的关节件中的预设位置,以牵连各个关节件在自身的第一啮合部和第二啮合部分别绕空间坐标系中两个倾交的方向弯折;
5、刚性骨架被构造为使其嵌接于第一子关节、第二子关节和第三子关节中相邻的两者,以支撑第一啮合部和第二啮合部并约束关节件弯折中的偏移方向。
6、根据本技术实施例的第一方面,第一啮合部具有两个相对的第一啮合壁面,两个第一啮合壁面由第一子关节和第二子关节的第一抵接端向远端延伸成型,且均包括弧形啮合面和倾斜的啮合平面;第一子关节和第二子关节能够绕第一抵接端弯折,且弯折区间与弧形啮合面的弯曲角度以及啮合平面的倾斜角度具有预设映射关系。
7、根据本技术实施例的第一方面,还包括沿第一方向贯序相连的第一支段、第二支段和第三支段,第一支段包括一个关节件,第二支段包括内部中空的第一管道以及安装于第一管道两端且彼此交错的两个关节件,第三支段与第二支段中远离第一支段的第三子关节相连。
8、根据本技术实施例的第一方面,第二绳索件包括一级绳索组、二级绳索组和三级绳索组,一级绳索组与第一支段相连,二级绳索组经由第二支段的第一端平行延伸至第二端,三级绳索组包括第一区段和第二区段,第一区段经由第二支段的第一端交叉对称延伸至第二端,第二区段从第二支段的第二端平行地朝驱动件延伸。
9、根据本技术实施例的第一方面,第二子关节和第三子关节邻接成型有第二抵接端;一级绳索组和三级绳索组中的绳索均分为两对,第一对绳索中的两个绳索在空间坐标系中的排列方向与第一抵接端的延伸方向一致,第二对绳索中的两个绳索在空间坐标系中的排列方向与第二抵接端的延伸方向一致。
10、根据本技术实施例的第一方面,第二啮合部包括两个相对的第二啮合壁面,第二子关节具有一个第一啮合壁面和一个第二啮合壁面,在第二子关节中,第一啮合壁面绕关节件轴向转过90°后的第二中间体与第二啮合壁面一致。
11、根据本技术实施例的第一方面,第一支段中的第三子关节开设有多个深度相同的第三通道和第四通道,以容纳多个第一夹头来约束二级绳索组的第一端;二级绳索组的第二端套设有第二夹头,并与第二支段中与第三支段邻接的第一子关节限位相接。
12、根据本技术实施例的第一方面,第一啮合部包括两对第一弧形凹槽,第二啮合部包括两对第二弧形凹槽,第一弧形凹槽和第二弧形凹槽沿第一方向在关节件横截面的投影相互正交;刚性骨架包括多个第一连杆和多个第一销子,第一连杆通过第一销子滑动嵌接于成对的第一弧形凹槽和成对的第二弧形凹槽。
13、根据本技术实施例的第一方面,第一子关节、第二子关节和第三子关节均设有第一销孔,第一销子过盈配合地穿设于第一销孔并与第一连杆相连;第一连杆的两端开设有第二销孔以与第一销子间隙配合。
14、根据本技术实施例的第一方面,第一通道与两个以上的关节件的中心轴线同轴,且延伸方向与多个第二通道的延伸方向一致;多个第二通道沿关节件的周向间隔分布于第一通道外侧。
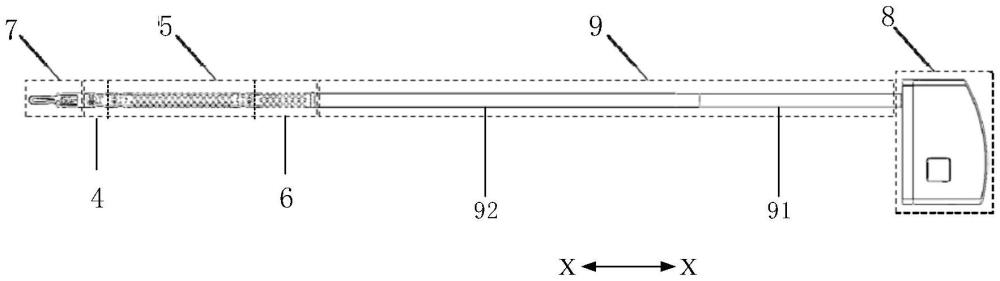
15、第二方面,本技术实施例提供了一种单孔连续体手术器械,该单孔连续体手术器械包括耦合关节模组、功能件、驱动件和管道件;功能件集成于耦合关节模组的第一端,且与耦合关节模组的第一支段啮合匹配;驱动件位于耦合关节模组沿第一方向远离其第一端延伸的远端且包括驱动电机、绳索滚轮、引导滚轮以及绕线轴,柔性牵引骨架的至少部分经由绳索滚轮、引导滚轮和绕线轴连接至驱动电机;管道件包括同轴嵌套相连的第一支管和第二支管,第一支管和第二支管分别连接驱动件和耦合关节模组。
16、根据本技术实施例的第二方面,功能件包括底座、夹持件和连杆件;底座与柔性牵引骨架中的一级绳索组相连且内置有容置腔,底座与耦合关节组邻接的一侧具有凸起部并通过凸出部与第一支段啮合,底座沿自身厚度方向开设有贯穿的第三销孔;夹持件包括相互配合成组的第一夹子和第二夹子,第一夹子和第二夹子以第三销孔为定轴枢接相连;第一夹子和第二夹子分别具有延伸至容置腔的第一连接支段和第二连接支段,第一连接支段和第二连接支段背离容置腔的腔壁一侧具有柱状延伸支段;连杆件位于容置腔且与柱状延伸支段相连,柔性牵引骨架的第一绳索件延伸至容置腔内部并与连杆件相连,以控制连杆件变形并牵连夹持件运动。
17、根据本技术实施例的第二方面,连杆件呈平行四边形结构且包括与柱状延伸支段枢接相连的两个第二连杆和两个第三连杆;两个第二连杆和两个第三连杆通过两个第三夹头相连,第一绳索件中的两个绳索分别与两个第三夹头相连,两个第三夹头中的一者底端设有限位支段,限位支段可滑动地嵌接于底座底部的限位槽。
18、本发明提供了一种耦合关节模组和单孔连续体手术器械。与相关技术相比,具备以下有益效果:
19、本技术为提高单孔连续体手术器械的灵活性,对器械的关节进行了优化设计,耦合关节模组包括两个以上的关节件,在每个关节件中,第一子关节和第二子关节成型有第一啮合部,第二子关节和第三子关节成型有第二啮合部,柔性牵引骨架在多个关节件之间按预定规律穿设布置,由于第二绳索件中的多个绳索经由多个第二通道延伸至两个以上的关节件中的预设位置,通过牵引第二绳索件中的不同绳索,能够精准控制不同的关节件在其自身的第一啮合部或第二啮合部绕对应方向弯折相应角度,在第一啮合部和第二啮合部弯折过程中,各个子关节均受到刚性骨架的支撑约束,防止关节件的横向偏移和轴向分离,提高了器械受力的刚度;整个耦合关节模组中的多个关节件同时作用,能够灵活地使器械呈现多样化的造型,满足单孔手术场景的使用需求。
20、附图说明
21、为了更清楚地说明本发明实施例或现有技术中的技术方案,下面将对实施例或现有技术描述中所需要使用的附图作简单地介绍,显而易见地,下面描述中的附图仅仅是本发明的一些实施例,对于本领域普通技术人员来讲,在不付出创造性劳动的前提下,还可以根据这些附图获得其他的附图。
22、图1是本技术实施例提供的单孔连续体手术器械的结构示意图;
23、图2是本技术实施例提供的耦合关节模组的结构示意图;
24、图3是本技术实施例提供的第一支段中第一子关节的结构示意图;
25、图4是本技术实施例提供的第一支段中第二子关节和第一连杆的结构示意图;
26、图5是本技术实施例提供的第一支段中第三子关节的结构示意图;
27、图6是本技术实施例提供的第一支段和第二支段的部分结构示意图;
28、图7是本技术实施例提供的第一支段和第二支段中两个关节件的结构示意图;
29、图8是本技术实施例提供的第二支段中与第三支段邻接的关节件的结构示意图;
30、图9是本技术实施例提供的第一子关节和第二子关节在刚性骨架作用下的装配示意图;
31、图10是本技术实施例提供的关节件中第一啮合壁面的示意图;
32、图11是本技术实施例提供的第二支段的结构示意图;
33、图12是本技术实施例提供的功能件的立体示意图;
34、图13是本技术实施例提供的功能件的仰视图;
35、图14是本技术实施例提供的夹持件打开状态下的连杆件示意图;
36、图15是本技术实施例提供的夹持件闭合状态下的连杆件示意图;
37、图16是本技术实施例提供的驱动件的部分结构示意图。
- 还没有人留言评论。精彩留言会获得点赞!