一种插植模具的位置优化方法、电子设备及存储介质
本发明涉及后装插植,尤其涉及一种插植模具的位置优化方法、电子设备及存储介质。
背景技术:
1、腔内联合宫旁插植的三维后装治疗技术是对局部宫颈癌放疗的手段之一,随着3d打印技术的发展,该技术的宫旁插植模具越来越多地采用3d打印技术进行个性化制作,一定程度上提高了针状施源器在患者体内的插植精度,但由于3d打印宫旁插植模具的患者在制作和使用时体内各器官的解剖结构形态和位置有可能会不一样,导致3d打印宫旁插植模具存在插植精度低、效率低的问题,从而可能对患者造成创伤,降低治疗效果。
技术实现思路
1、本技术实施例的主要目的在于提供一种插植模具的位置优化方法、电子设备及存储介质,能够提高模具的插植精度,提高插植模具的使用效率。
2、为实现上述目的,本技术实施例的一方面提出了一种插植模具的位置优化方法,所述方法包括:
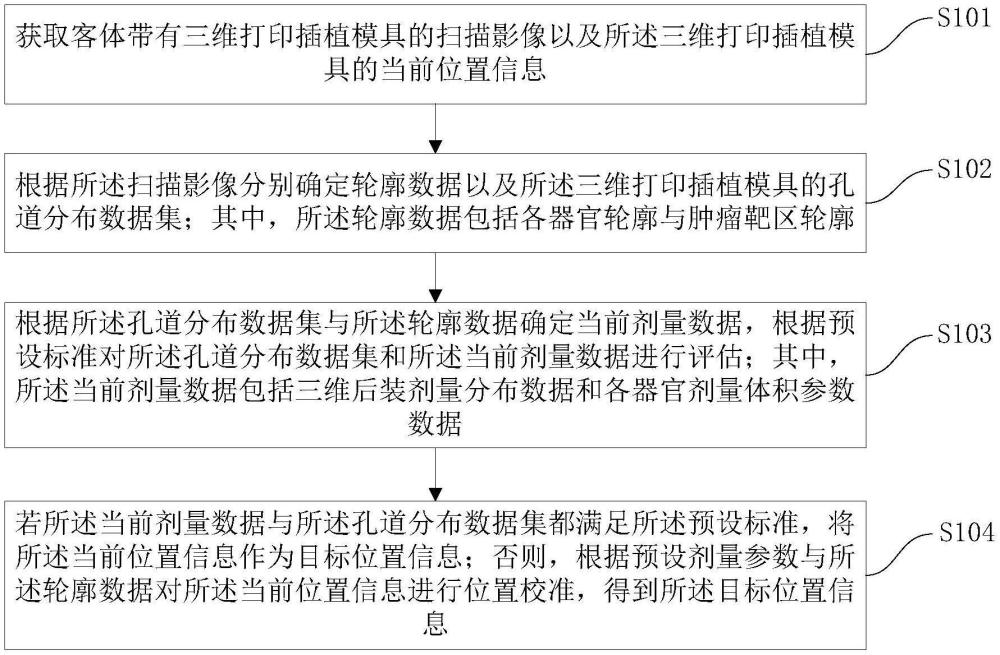
3、获取客体带有三维打印插植模具的扫描影像以及所述三维打印插植模具的当前位置信息;
4、根据所述扫描影像分别确定轮廓数据以及所述三维打印插植模具的孔道分布数据集;其中,所述轮廓数据包括各器官轮廓与肿瘤靶区轮廓;
5、根据所述孔道分布数据集与所述轮廓数据确定当前剂量数据,根据预设标准对所述孔道分布数据集和所述当前剂量数据进行评估;其中,所述当前剂量数据包括三维后装剂量分布数据和各器官剂量体积参数数据;
6、若所述当前剂量数据与所述孔道分布数据集都满足所述预设标准,将所述当前位置信息作为目标位置信息;否则,根据预设剂量参数与所述轮廓数据对所述当前位置信息进行位置校准,得到所述目标位置信息。
7、在一些实施例中,所述根据所述孔道分布数据集与所述轮廓数据确定当前剂量数据,具体包括:
8、获取针状施源器的插入深度数据与剂量数据,根据所述插入深度数据与所述孔道分布数据集确定空间组合关系;
9、根据所述空间组合关系和所述剂量数据确定三维后装剂量分布数据,根据所述三维后装剂量分布数据与所述轮廓数据确定器官剂量体积参数数据;
10、根据所述三维后装剂量分布数据与所述器官剂量体积参数数据确定当前剂量数据。
11、在一些实施例中,所述根据预设剂量参数与所述轮廓数据对所述当前位置信息进行位置校准,得到所述的目标位置信息,具体包括:
12、根据所述预设剂量参数与所述轮廓数据确定所述孔道分布数据集的目标空间位置信息;其中,所述预设剂量参数包括肿瘤靶区预设剂量值与各器官预设剂量值;
13、根据所述目标空间位置信息进行逆向推算操作,得到所述三维打印插植模具的位置校准数据,根据所述位置校准数据对所述当前位置信息进行位置调整,得到目标位置信息。
14、在一些实施例中,所述根据所述预设剂量参数与所述轮廓数据确定所述孔道分布数据集的目标空间位置信息,具体包括:
15、根据所述轮廓数据对所述孔道分布数据集进行位置调整操作,得到第一坐标集;其中,所述位置调整操作包括平移、定点旋转、轴向旋转,所述第一坐标集包括若干个位置调整后的孔道坐标集;
16、根据所述第一坐标集与所述预设剂量值确定第一剂量差值集,对所述第一剂量差值集进行排序,确定目标剂量差值,将所述目标剂量差值所对应的第一坐标集作为目标空间坐标信息。
17、在一些实施例中,所述根据所述轮廓数据对所述孔道分布数据集进行位置调整操作,得到第一坐标集,具体包括:
18、根据所述轮廓数据确定区域中心点,根据所述区域中心点对所述孔道分布数据集进行定点旋转操作,并根据第一预设公式与定点旋转后的孔道分布数据集进行计算,得到第一子坐标集;
19、根据预设间距与所述轮廓数据对所述孔道分布数据集进行平移操作,得到第一孔道分布数据集,根据第二预设公式与所述第一孔道分布数据集进行计算,得到第二子坐标集;
20、根据预设旋转角度范围与所述轮廓数据对所述孔道分布数据集进行轴向旋转操作,得到第二孔道分布数据集,根据所述第二预设公式与所述第二孔道分布数据集进行计算,得到第三子坐标集;
21、根据所述第一子坐标集、所述第二子坐标集以及所述第三子坐标集确定第一坐标集。
22、在一些实施例中,所述根据预设间距与所述轮廓数据对所述孔道分布数据集进行平移操作,得到第一孔道分布数据集,具体包括:
23、根据所述预设间距对所述孔道分布数据集进行第一方向的平移操作,得到平移后的孔道分布数据集,并根据所述轮廓数据与所述平移后的孔道分布数据集进行比对;
24、若所述平移后的孔道分布数据集都满足所述轮廓数据,将所述平移后的孔道分布数据集作为第一孔道分布数据集,并返回执行根据所述预设间距对所述孔道分布数据集进行第一方向的平移操作这一步骤,直至存在平移后的孔道分布数据不满足所述轮廓数据;
25、若存在平移后的孔道分布数据不满足所述轮廓数据,对所述第一方向进行更新并记录更新次数,返回执行根据所述预设间距对所述孔道分布数据集进行第一方向的平移操作这一步骤,直至所述更新次数大于预设阈值。
26、在一些实施例中,所述根据预设旋转角度范围与所述轮廓数据对所述孔道分布数据进行轴向旋转操作,得到第二孔道分布数据,具体包括:
27、对所述孔道分布数据集进行轴向旋转操作,得到轴向旋转后的孔道分布数据集,根据所述轴向旋转后的孔道分布数据集确定当前旋转角度,根据所述预设旋转角度范围与所述当前旋转角度进行比较,根据所述轮廓数据与所述轴向旋转后的孔道分布数据集进行比对;
28、若所述当前旋转角度小于所述预设旋转角度范围,且所述轴向旋转后的孔道分布数据集满足所述轮廓数据,将所述轴向旋转后的孔道分布数据集作为第二孔道分布数据集,并返回执行所述对所述孔道分布数据集进行轴向旋转操作,得到轴向旋转后的孔道分布数据集这一步骤,直至所述当前旋转角度大于或等于所述预设旋转角度范围,或所述轴向旋转后的孔道分布数据集不满足所述轮廓数据。
29、在一些实施例中,所述根据所述第一坐标集与所述预设剂量值确定第一剂量差值集,具体包括:
30、对所述第一坐标集进行遍历,得到若干个孔道坐标数据,根据若干个所述孔道坐标数据确定对应的孔道分布数据集;
31、根据所述第一坐标集与所述剂量数据确定若干个当前剂量参数集,根据预设剂量值与若干个所述当前剂量参数集进行差值计算,得到若干个剂量差值集;
32、对每个所述剂量差值集进行求和计算,得到若干个第一剂量差值,根据若干个所述第一剂量差值确定第一剂量差值集。
33、为实现上述目的,本技术实施例的另一方面提出了一种电子设备,所述电子设备包括存储器和处理器,所述存储器存储有计算机程序,所述处理器执行所述计算机程序时实现前面所述的方法。
34、为实现上述目的,本技术实施例的另一方面提出了一种计算机可读存储介质,所述计算机可读存储介质存储有计算机程序,所述计算机程序被处理器执行时实现前面所述的方法。
35、实施本技术实施例包括以下有益效果:本实施例提供一种插植模具的位置优化方法、电子设备及存储介质,该方案通过获取客体带有三维打印插植模具的扫描影像以及三维打印插植模具的当前位置信息;然后,根据扫描影像分别确定轮廓数据以及三维打印插植模具的孔道分布数据,根据孔道分布数据和轮廓数据确定当前剂量数据,根据预设标准对孔道分布数据以及当前剂量数据进行评估;若孔道分布数据和当前剂量数据都满足预设标准,将当前位置信息作为目标位置信息,否则,根据预设剂量参数和轮廓数据对当前位置信息进行位置校准,得到目标位置信息;通过判断客体带有插植模具时各孔道分布数据和剂量数据是否满足预设标准,并在不满足预设标准时,根据客体带有插植模具时的轮廓数据和预设剂量参数调整插植模具的位置数据,减少反复调整,提高插植模具的插植精度和插植模具的使用效率。
- 还没有人留言评论。精彩留言会获得点赞!