一种电刺激治疗仪的控制方法、装置以及系统与流程
本发明涉及电刺激治疗,特别是涉及一种电刺激治疗仪的控制方法、装置以及系统。
背景技术:
1、电刺激治疗仪可以适用于脑卒中引起的上下肢功能障碍的康复训练;脑卒中会引起肢体的活动障碍,使得肢体的调节能力减弱而造成肢体活动不便,常见病症有偏瘫。通过电刺激治疗仪的电极向患者的肢体部位发出电刺激信号,利用电刺激信号激发患者肢体肌肉伸缩运动,从而实现患者瘫痪肢体或者运动受限的肢体进行自主运动功能训练。
2、但电刺激治疗仪在实际进行治疗过程中,需要医护人员基于患者实际情况,将电刺激治疗仪输出的电刺激信号的参数调整至合理范围内;这就需要病患必须要在医院或者疗养院等具有专业医护人员的场所才能进行电刺激治疗,给病患的电刺激治疗带来极大的不便,不利于电刺激治疗仪的广泛应用。
技术实现思路
1、本发明的目的是提供一种电刺激治疗仪的控制方法、装置以及系统,在保证电刺激信号治疗的有效性的基础上,实现电刺激信号的参数自动化调整,也即可便于电刺激治疗仪在家庭或者其他环境的广泛应用,提升电刺激治疗仪使用的便利性。
2、为解决上述技术问题,本发明提供一种电刺激治疗仪的控制方法,包括:
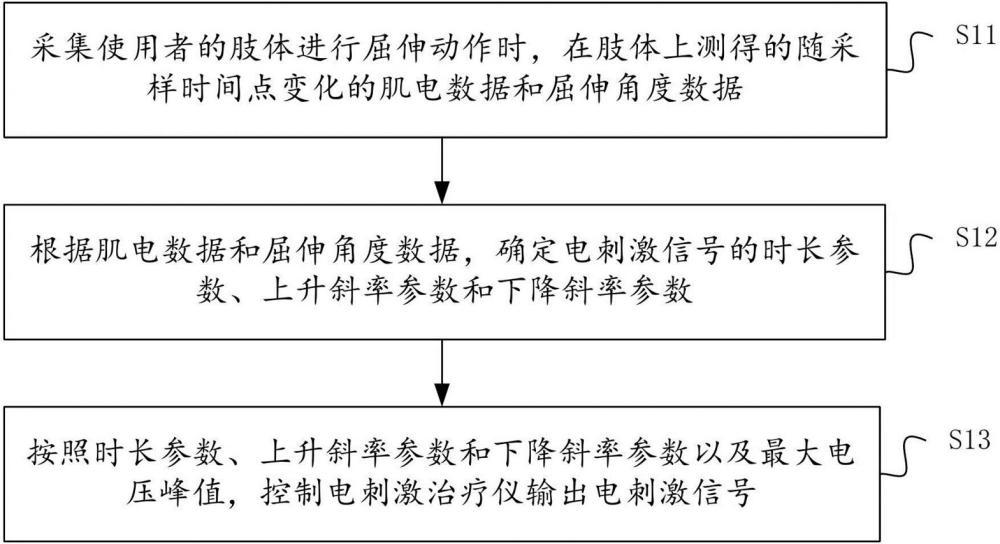
3、采集使用者的肢体进行屈伸动作时,在所述肢体上测得的随采样时间点变化的肌电数据和屈伸角度数据;
4、根据所述肌电数据和所述屈伸角度数据,确定电刺激信号的时长参数、上升斜率参数和下降斜率参数;
5、按照所述时长参数、所述上升斜率参数和所述下降斜率参数以及最大电压峰值,控制所述电刺激治疗仪输出电刺激信号。
6、在本技术的一种可选地实施例中,采集使用者的肢体进行屈伸动作时,在所述肢体上测得的随采样时间点变化的肌电数据和屈伸角度数据,包括:
7、在所述肢体进行至少两次完整屈伸动作中采集在各个采样时间点对应的所述肌电数据和所述屈伸角度数据;其中,一次所述完整屈伸动作为所述肢体由最大屈伸角度到最小屈伸角度再到所述最大屈伸角度的屈伸动作;
8、相应地,根据所述肌电数据和所述屈伸角度数据,确定电刺激信号的所述时长参数、上升斜率参数和下降斜率参数,包括:
9、根据随各个采样时间点变化的所述屈伸角度数据,确定在所述肢体的一次所述完整屈伸动作中,所述屈伸角度数据小于等于设定屈伸角度对应的第一起点时刻和第一终点时刻;
10、以所述第一终点时刻和所述第一起点时刻之间的时间差值作为所述时长参数;
11、根据随各个采样时间点变化的所述肌电数据,确定在所述肢体的一次所述完整屈伸动作中,所述肌电数据大于设定肌电阈值的第二起点时刻和第二终点时刻;
12、以所述第一起点时刻和所述第二起点时刻之间的时间差作为上升时长,对所述最大电压峰值和所述上升时长进行比值运算,获得所述上升斜率参数;
13、以所述第二终点时刻和所述第一终点时刻之间的时间差作为下降时长,对所述最大电压峰值和所述下降时长进行比值运算,获得所述下降斜率参数。
14、在本技术的一种可选地实施例中,确定所述设定肌电阈值的过程包括:
15、根据随各个采样时间点变化的所述肌电数据,确定在所述肢体的一次所述完整屈伸动作中的最大肌电数据和最小肌电数据;
16、根据所述最大肌电数据和所述最小肌电数据以及肌电阈值公式:s0=smin+k(smax-smin),确定所述设定肌电阈值;其中,s0为所述设定肌电阈值,smax和smin分别为所述最大肌电数据和所述最小肌电数据,k为比例系数,且k的取值范围为(0.5,1)。
17、在本技术的一种可选地实施例中,还包括:
18、根据所述肢体在连续两次所述完整屈伸动作中的所述屈伸角度数据,确定上一次完整屈伸动作对应的第一终点时刻和下一次完整屈伸动作对应的第一起点时刻之间的时间差值作为相邻两次输出所电刺激信号之间的间隔时间参数。
19、在本技术的一种可选地实施例中,在采集使用者的肢体进行屈伸动作时,在所述肢体上测得的随采样时间点变化的肌电数据和屈伸角度数据之后,还包括:
20、利用滑动平均滤波算法分别对随所述采样时间点变化的所述肌电信号和所述屈伸角度数据进行滤波平滑处理,获得滤波平滑处理后的所述肌电数据和所述屈伸角度数;
21、相应地,根据所述肌电数据和所述屈伸角度数据,确定电刺激信号的所述时长参数、上升斜率参数和下降斜率参数,包括:
22、根据滤波平滑处理后的所述肌电数据和所述屈伸角度数,确定电刺激信号的所述时长参数、上升斜率参数和下降斜率参数。
23、在本技术的一种可选地实施例中,以所述第一终点时刻和所述第一起点时刻之间的时间差值作为所述时长参数,包括:
24、以所述肢体的多个完整屈伸动作分别对应的所述第一终点时刻和所述第一起点时刻之间的时间差值之间的平均值作为所述时长参数;
25、以所述第一起点时刻和所述第二起点时刻之间的时间差作为上升时长,包括:
26、以所述肢体的多个完整屈伸动作分别对应的所述第一起点时刻和所述第二起点时刻之间的时间差之间的平均值作为所述上升时长;
27、以所述第二终点时刻和所述第一终点时刻之间的时间差作为下降时长,包括:
28、以所述肢体的多个完整屈伸动作分别对应的所述第二终点时刻和所述第一终点时刻之间的时间差之间的平均值作为所述下降时长。
29、一种电刺激治疗仪的控制装置,包括:
30、数据采集模块,用于采集使用者的肢体进行屈伸动作时,测得所述肢体随采样时间点变化的肌电数据和屈伸角度数据;
31、数据分析模块,用于根据所述肌电数据和所述屈伸角度数据,确定电刺激信号的所述时长参数、上升斜率参数和下降斜率参数;
32、信号输出模块,用于按照所述时长参数、所述上升斜率参数和所述下降斜率参数以及最大电压峰值,控制所述电刺激治疗仪输出电刺激信号。
33、一种电刺激治疗仪的控制系统,包括:
34、分别用于采集使用者的肢体进行屈伸动作时所述肢体随采样时间点变化的肌电数据和屈伸角度数据的肌电传感器和屈伸角度检测器;
35、用于输出电刺激信号的电刺激治疗仪;
36、和所述肌电传感器、所述屈伸角度检测器以及所述电刺激治疗仪均相连接的处理器,用于执行如上任一项所述的电刺激治疗仪的控制方法的步骤。
37、在本技术的一种可选地实施例中,所述屈伸角度检测器为摄像装置,用于采集所述肢体进行屈伸动作的屈伸图像;
38、所述处理器用于分析识别所述屈伸图像,以确定所述屈伸角度数据。
39、在本技术的一种可选地实施例中,还包括和所述处理器相连接的语音装置,用于提示所述使用者进行屈伸动作。
40、本发明所提供的一种电刺激治疗仪的控制方法、装置以及系统,该电刺激治疗仪的控制方法包括采集使用者的肢体进行屈伸动作时,在肢体上测得的随采样时间点变化的肌电数据和屈伸角度数据;根据肌电数据和屈伸角度数据,确定电刺激信号的时长参数、上升斜率参数和下降斜率参数;按照时长参数、上升斜率参数和下降斜率参数以及最大电压峰值,控制电刺激治疗仪输出电刺激信号。
41、本技术中考虑到在利用电刺激治疗仪对使用者的肢体进行电刺激治疗时,电刺激信号的各项参数是需要基于肢体肌肉自主运动的力量进行设定的;为此,本技术中先采集在肢体屈伸动作时的屈伸角度数据和肌电数据;显然,肢体进行屈伸动作的快慢(可以通过屈伸角度数据变化快慢表示)以及肌电数据的大小都能够在一定程度上反应肢体肌肉能够进行自主运动力量大小;由此,本技术中即可基于肌电数据和对应的屈伸角度数据作为依据,分析确定电刺激信号的时长参数、上升斜率参数和下降斜率参数等参数,由此在对肢体进行电刺激治疗时,在保证电刺激信号治疗的有效性的基础上,实现电刺激信号的参数自动化调整,也即可便于电刺激治疗仪在家庭或者其他环境的广泛应用,提升电刺激治疗仪使用的便利性。
- 还没有人留言评论。精彩留言会获得点赞!