C形臂系统的C形臂的轨迹的制作方法
本发明涉及一种用于控制c形臂系统的c形臂的方法。在所述方法中进行c形臂的旋转的正向运行和c形臂的旋转的反向运行。本发明还涉及一种用于生成检查对象的3d图像数据的成像方法。此外,本发明还涉及一种控制装置。此外,本发明还涉及一种c形臂系统。
背景技术:
1、借助现代的成像方法产生二维或三维的图像数据,这些图像数据可以用于可视化地显示被成像的检查对象并且此外也可以用于其他应用。
2、成像方法通常以检测x射线为基础。x射线系统通常包括x射线源和与x射线源相对置的x射线探测器。在成像时,检查对象、尤其是患者被定位在x射线源和x射线探测器之间的间隙内,对该检查对象进行图像拍摄。其中一种x射线系统是所谓的c形臂系统。在这些x射线系统中,x射线源和通常为扁平探测器的x射线探测器被固定在也被称为c形臂的c形的支撑元件上。由于其形状,c形臂以及与之对应的诊断-或治疗设备或x射线探测器可以围绕患者的待检查或治疗的点进行轨道移动,以便由此在患者与诊断-或治疗设备或x射线探测器之间实现不同的角度位置,而无需移动患者。
3、如果要从不同的位置对待检查或待治疗的局部区域进行成像,或者如果要在对检查对象的较大区域成像时共同移动成像系统或x射线探测器,则将c形臂例如围绕居中地与c形臂中心相连的支撑轴线旋转。
4、在介入治疗领域已存在借助c形臂血管造影设备进行3d成像的技术。然而,与传统的ct系统相比所存在的明显的局限性在于,扁平探测器的尺寸限制了成像区域。有限的成像区域使得许多器官、如肺部、肝脏无法通过单独的拍摄进行检测。此外,几乎所有身体区域的投影数据均是侧向切断或截断的,这在常见的重建方法中导致图像伪影(截断伪影)。
5、迄今在临床上使用的具有大成像区域的c形臂3d成像解决方案假定焦点(即电子撞击x射线源阳极的点或发射x射线光子的点)相对于测量对象(患者)的相对位置相同。在机器人式的系统的现有的“大体积”方案中,焦点在圆形轨迹中围绕患者移动。因此,与患者的距离保持不变。对于具有刚性的c形臂的血管造影系统来说,这要求c形臂的等中心点在围绕患者旋转的过程中在旋转平面中朝向两个方向动态地横向平移,而这只有在复杂的机器人机械结构中才能实现。
6、对于经典的等中心血管造影系统,使用具有横向平移的等中心点的轨迹。在此在旋转平面中进行正向运行和反向运行并且同时进行附加的一维的横向运动。这种如图1所示的轨迹对c形臂系统的机械设计的要求低得多,并且即使是简单地构造的c形臂系统也能实现大的3d成像范围。然而,图1所示的轨迹仍然存在实际的缺点:
7、-正向运行的终止点与反向运行的起始点不一致。因此,系统必须在运行之间移动。这可能会导致几秒钟的时间延迟。由于患者在拍摄期间必须屏住呼吸,因此时间延迟应当尽可能短。
8、-在运行期间,沿着横向方向的运动的方向发生变化。因此,在ap方向(ap是"anterior-posterior"、即“前后”的首字母缩写)上,沿着横向方向的速度的符号变化。这种变化尤其是在典型的顶部悬挂式系统中可能导致不可复现的几何误差。由于3d重建需要非常高的拍摄几何精度,因此这可能导致图像伪影。
技术实现思路
1、因此,本发明所要解决的技术问题在于,提供一种用于控制c形臂的方法和控制装置,通过所述方法和控制装置能够以节省时间的方式以减少的图像伪影进行成像。
2、所述技术问题通过一种用于控制c形臂系统的c形臂的方法、一种用于生成检查对象的3d图像数据的成像方法、一种控制装置以及一种c形臂系统解决。
3、在根据本发明的用于控制c形臂系统、优选顶部悬挂式的c形臂系统的c形臂的方法中,如开篇所述地进行c形臂的旋转的正向运行。正向运行以具有第一偏移值的横向偏移在c形臂的正向运行的起始位置启动。横向偏移应当理解为c形臂的沿着横向于患者卧榻的水平方向的平移。由此也使c形臂系统x射线源的焦点沿着横向平移。c形臂随即沿着正向方向旋转到正向运行的终止位置,其中,横向偏移单调减小至0。除了偏移的上述为0的值之外,正向运行的终止点还具有轨道角β的预定的值。如之后仍将详细阐述的那样,起始点和终止点的轨道角的值选择为,使得成像能够覆盖检查对象周围足够大的角度范围。正向运行的起始点和终止点的轨道角β的值优选分别为至少90°或-90°。正向运行的起始点和终止点的轨道角β的值优选分别为100°或-100°。同样优选的是,正向运行的起始点和终止点的轨道角β的值优选在[90°,120°]或[-90°,-120°]的区间范围内。由于机械方面的原因,尤其顶部悬挂式的系统无法以任意的角度移动。也可行的是,将起始/终止角度(从理想值=100°)调移至20°,继续调移通常将使系统无法机械旋转。
4、同样如开篇所述地,接着进行c形臂的旋转的反向运行,即沿着与正向运行的方向相反的(旋转)方向旋转。反向运行在此首先在正向运行的终止位置启动,并且c形臂随即沿着反向旋转至反向运行的终止位置。在旋转时,横向偏移沿着与正向运行的横向偏移相反的方向单调增大,直至在反向运行的终止位置处达到第二偏移值。"增大"应当表示横向偏移的绝对值的增大。例如如果正向运行时的横向偏移为正,则反向运行时的横向偏移为负。如果正向运行时的横向偏移为负,则反向运行时的横向偏移为正。有利的是,正向运行和反向运行的轨迹不同,从而能够在反向运行时获取患者的附加的图像信息。
5、与传统的控制方法不同的是,在按照本发明的方法中,正向运行的终止点对应于反向运行的起始点。有利的是,c形臂无需在正向运行和反向运行之间移动。由于患者在拍摄期间必须屏住呼吸,因此有利地使正向运行和反向运行之间的时间延迟被避免或尽可能保持得较短。
6、此外有利地实现的是,在运行期间,即在正向运行期间和在反向运行期间,c形臂沿着横向方向的运动的方向不变。
7、尤其是在典型的顶部悬挂式的系统中,运行期间的运动的方向的这种变化可能在传统的做法中导致无法复现的几何误差。由于3d重建要求拍摄的几何精度非常高,因此这些误差可能导致图像伪影。由于c形臂横向运动时的运动方向保持在正向运行的运动过程和反向运行的运动过程内,因此现在有利地避免了这种图像伪影。
8、在根据本发明的用于生成检查对象的3d图像数据的成像方法中,通过使用用于控制c形臂系统的c形臂的方法检测检查对象的投影数据,并且基于所检测的投影数据重建3d图像数据。有利地可以通过根据本发明的成像方法获取检查对象、优选是患者的具有改善的质量的3d图像数据。
9、根据本发明的控制装置具有启动单元,该启动单元用于在c形臂旋转的正向运行中以具有第一偏移值的横向偏移控制c形臂的起始位置,并且用于在正向运行的起始位置中启动正向运行,并且用于在正向运行的终止位置处启动c形臂的旋转的反向运行。
10、根据本发明的控制装置还具有旋转单元,该旋转单元用于将正向运行中的c形臂沿着正向方向旋转至正向运行的终止位置,其中横向偏移减小至0值,该旋转单元还用于将反向运行中的c形臂沿着反向方向旋转至反向运行的终止位置,其中,横向偏移沿着与正向运行的横向偏移相反的方向增大至反向运行的终止位置处的第二偏移值。根据本发明的控制装置与根据本发明的用于控制c形臂系统的c形臂的方法具有相同的优点。
11、根据本发明的c形臂系统包括c形臂、优选是c形臂状的支撑元件,该支撑元件能够围绕至少一个旋转-或枢转轴线旋转或枢转。此外,根据本发明的c形臂系统还包括x射线源和x射线探测器,所述x射线源布置在c形臂、优选是c形臂状的支撑元件的第一端部,并且所述x射线探测器与x射线源相对置地布置在c形臂的第二端部。此外,根据本发明的c形臂系统还包括根据本发明的控制装置。根据本发明的c形臂系统与根据本发明的用于控制c形臂系统的c形臂的方法具有相同的优点。
12、控制装置和c形臂系统的上述部件中的大部分均能够完全地或部分地以软件模块的形式在相应的计算系统的处理器中实现。很大程度上基于软件的实现具有以下优点:当前已经使用的计算系统也可以以简单的方式通过软件更新改装,以便以根据本发明的方式工作。在这方面,所述技术问题通过具有计算机程序的相应的计算机程序产品解决,该计算机程序能够以程序部段直接加载到计算系统中,当所述程序在计算系统中执行时,程序部段能够执行根据本发明的用于控制c形臂系统的c形臂的方法的步骤。除了计算机程序之外,这样的计算机程序产品必要时可以包括附加的组成部分、例如文档和/或附加部件,以及硬件部件、例如用于软件使用的硬件密钥(加密狗等)。
13、其上存储有计算机程序的能被计算系统读取和执行的程序部段的计算机可读介质、例如记忆棒、硬盘或其他可移动或固定安装的数据载体可以用于向计算系统或控制装置传输,和/或用于在计算系统或控制装置中或在计算系统或控制装置处进行存储。计算系统例如可以为此具有一个或多个协同工作的微处理器或类似设备。
14、以下描述分别包含本发明的特别有利的设计方案和扩展设计。在此,尤其一个权利要求类别的多个权利要求也可以与另一个权利要求类别的从属权利要求相类似地进行改进。此外,在本发明的范畴内还可以将不同实施例和权利要求的不同技术特征组合成新的实施例。
15、在根据本发明的用于控制c形臂系统的c形臂的方法的一个设计方案中,c形臂的正向运行的起始位置具有第一角度位置。此外,正向运行的终止位置具有第二角度位置,并且反向运行的终止位置具有第三角度位置。第一角度位置、第二角度位置和第三角度位置在此优选具有绝对值相同的角度。有利的是,c形臂并且因此x射线探测器和x射线源在正向运行和反向运行中移过的角度范围是对称的。位于相对于ap位置(前后位置,患者沿着垂直方向被照射,轨道角为0°)对称的患者卧榻上的患者可以有利地从两侧分别从绝对值相同的角度进行成像。
16、为了获得足够的数据进行3d重建,必须移过至少一个200°的圆弧段。在此适宜的是,沿着在ap平面“左侧”和“右侧”分别100°的圆弧段进行旋转。出于机械方面的原因,尤其顶部悬挂式的系统无法以任意的角度移动。也可行的是,将起始-/终止角度调移最多20°,继续调移将使系统无法机械旋转。
17、第一角度位置优选具有100°的角度,第二角度位置优选具有-100°的角度,并且第三角度位置优选具有100°的角度。可以有利地从200°的角度范围内获取图像数据,从而可以从不同方向对检查区域或检查对象进行成像。从不同方向检测的图像信息可以有利地结合成检查区域的3d图像。
18、因此,优选将100°的轨道角用作正向运行的起始位置,并且优选将-100°的轨道角用作正向运行的终止位置。此外,将-100°的轨道角用作反向运行的起始位置,并且将100°的轨道角用作反向运行的终止位置。
19、如上所述,针对正向运行和反向运行优选应当移过至少为200°的角度范围。移过的角度范围同样优选应当处于180°至240°之间、特别优选190°至210°之间的值范围内。
20、第一偏移值和第二偏移值特别优选具有相同的绝对值。由于患者通常大致与矢状面对称,因此合理的是使用沿着两个方向相等的偏移。
21、在根据本发明的用于控制c形臂系统的c形臂的方法的另一个特别优选的变型方案中,在正向运行时,c形臂沿着正向方向的旋转包括以下步骤:
22、-在起始位置和ap位置之间的正向运行中保持横向偏移的第一偏移值,
23、-横向偏移在ap位置和横向位置之间逐渐减小至值0,
24、-从横向位置到正向运行的终止位置的范围内保持横向偏移的值为0。
25、在正向运行启动时用于横向偏移的第一偏移值有利地连续减少,直至横向位置,从而实现均匀的成像。
26、备选地,在正向运行时,偏移不是在横向位置就减小至0,而是在终止位置才减小至0。有利地实现偏移直至终止位置的连续的变化。
27、在反向运行中,c形臂的沿着反向的旋转优选包括:
28、-在从正向运行的终止位置到横向位置的范围内保持横向偏移的值为0,
29、-在旋转期间,横向偏移在横向位置和ap位置之间沿着正的横向方向逐渐增大到终止值,其中,所述横向偏移相对于正向运行的横向偏移沿着相反的方向,
30、-在ap位置与反向运行的终止位置之间保持所述偏移。
31、有利的是,在“右”象限中,即正向运行和反向运行中不发生偏移变化。这是因为右象限中存在的偏移变化必须通过左象限中的沿着相反的方向的移动来补偿。如果在移动过程中沿着两个方向发生偏移变化,则产生所描述的缺点,即在运行过程中沿着横向方向的运动的方向变化,如图2所示的传统的轨迹就是这种情况。因此有利的是,在启动旋转之前确定沿着一个方向的偏移,从而在右象限中在旋转期间偏移不改变,并且在返回时偏移保持不变直至终止。
32、在根据本发明的用于控制c形臂系统的c形臂的方法的另一个优选的变型方案中,横向偏移的最大值取决于探测器宽度。最大横向偏移应当选择为,使得在正向运行和反向运行中从同一角度拍摄的图像能够连接起来。如果在正向运行和反向运行中选择相同的但具有相反的符号的值作为最大横向偏移,则偏移最大应当为探测器宽度的一半。如果最大横向偏移较小,则在正向运行和反向运行的以相同的轨道角拍摄的图像数据之间产生重叠区域。相邻的图像拍摄可能有利地由于重叠而更容易结合。
33、同样优选的是,在根据本发明的用于控制c形臂系统的c形臂的方法中,横向偏移的最大值优选取决于x射线探测器在正向运行和反向运行中的重叠。所述重叠可以具有从0到1的值。值“0”在此表示不存在重叠,值“1”表示在正向运行和反向运行中以具有相同轨道角的c形臂位置拍摄的图像完全重叠。重叠越大,正向运行和反向运行的两个图像总体的图像数据之间的过渡就越“平滑”。基于冗余的图像数据能够通过插值法结合两个图像总体。
34、最大横向偏移的值优选由探测器宽度与下述差值的乘积确定,该差值为x射线探测器在轨道角相同的正向运行和反向运行中的重叠的值与值1之间的差。
35、最大横向偏移d的值在此为
36、
37、在此,w是x射线探测器的宽度,ol是两个顶点中的两个图像拍摄的重叠,或一般性而言是以相同轨道角进行的图像拍摄的重叠。如前所述,重叠可以在1和0之间选择。
38、最大的横向偏移d也相当于正向运行和反向运行的c形臂轨迹的两个顶点之间的距离的一半。
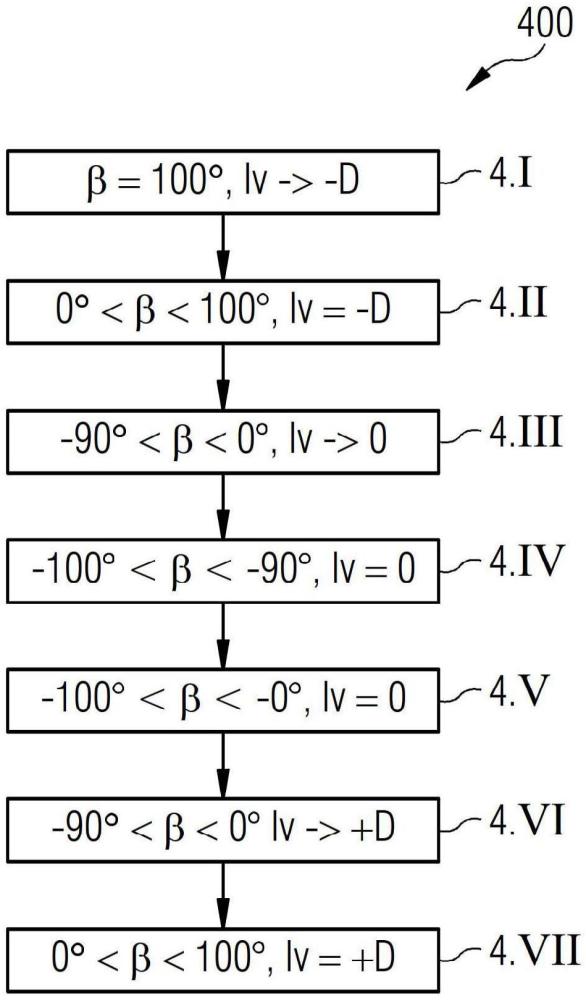
39、在根据本发明的用于控制c形臂系统的c形臂的方法的一个优选的设计方案中,c形臂在采集启动前从通常的3d起始位置以必要的最大横向偏移lv=-d偏移。在起始角100°和轨道角β为0°的ap位置之间进行的正向运行中,横向偏移lv保持为lv=-d。
40、“ap”是“anterior-posterior(前-后)”的缩写,并且描述的是在位置或取向或轨道角β=0°时对患者的正面的图像拍摄,其中,患者处于躺卧的位置中,并且x射线源和x射线探测器之间的连线垂直地取向。在正向运行和反向运行中,ap点通常也对应于相应的轨迹的顶点。100°的起始角或轨道角是指x射线源和x射线探测器之间的连线在起始时旋转超过横向的定向,以便能够在c形臂拍摄时移过更大的角度范围,并且因此得到关于患者的待成像的检查区域的附加的空间信息。在起始角为100°时,形象地说是从斜下方拍摄待成像的检查区域。
41、在0°的轨道角、即ap点和-90°的轨道角、即x射线源和x射线探测器之间的连线的横向的取向之间,c形臂的横向偏移在旋转期间沿着正的横向方向减小至横向偏移lv=0,并且在从-90°的轨道角到-100°的终止角的范围内保持横向偏移lv=0。在返回中,横向偏移lv在轨道角为-100°至-90°的范围内保持为0。在-90°和0°的轨道角之间,即在横向取向和前后取向之间,在旋转期间,横向偏移lv沿着正的横向方向增大至值lv=+d。在0°和100°的轨道角β之间,横向偏移lv保持为值lv=+d。
42、对于正向运行,c形臂的x射线源的焦点优选描述以下轨迹a1:
43、对于β>0°:
44、
45、对于-90°<β<0°:
46、
47、对于β<-90°:
48、
49、对于反向运行,c形臂的x射线源的焦点优选描述以下轨迹a2:
50、对于β>0°:
51、
52、对于-90°<β<0°:
53、
54、对于β<-90°:
55、
56、轨道角β描述以下曲线:
57、
58、值scd表示x射线源与c形臂系统的中心、即检查对象或尤其是患者所在的中心之间的距离。
59、如de 102020209703 a1所述,可以根据通过本发明的方法的其中一个变型方案以根据本发明的轨迹a1、a2拍摄的投影数据重建3d图像数据。
- 还没有人留言评论。精彩留言会获得点赞!