一种激光同步检测装置、方法及系统与流程
本技术涉及放射治疗定位领域,尤其涉及一种激光同步检测装置、方法及系统。
背景技术:
1、病人在进行放疗前需要通过放疗计划精准定位到病变区域,精确的放疗计划必须要求精确的三维图像定位,实际应用中,通常使用ctsim(ct simulation system)三维激光定位系统来对患者病变区坐标信息进行标记定位。其中,激光线的移动同步性、准确性往往会对患者病变区的坐标信息的定位产生很大的影响。如果无法准确有效定位患者病变区位置,医生则无法有效对患者病变区进行有效的治疗计划,进而无法有效保障患者病变的有效治疗。
2、在实际应用中,医院所用的ctsim三维激光定位系统由多组可移动激光模组组成,通过矢状面、冠状面以及横切面激光线标定实现患者病变区域定位。其中,横切面和冠状面的定位激光各自由两组互为镜像的可移动激光模组完成,因此激光定位中对互为镜像可移动激光模组的同步性、准确性有很高的要求。但在实际安装调试中,互为镜像的可移动激光模组的移动同步性、准确性往往难以准确量化测量,导致ctsim三维激光定位系统的性能严重依赖调试工程师的经验水平,厂家批量产品性能稳定性不能有效保障,好多设备安装于医院现场并不能很好的服务患者,好多ctsim三维激光定位系统在医院服务一段时间后爆发移动不同步、定位不准确问题,现场工程师往往会花大量的时间去调试,从而大量占用了医院服务患者的时间,进而导致医治效率大打折扣。
3、三维激光定位系统实际使用以及系统调试中,互为镜像可移动激光模组移动是否同步尤为重要。在对于ctsim三维激光定位系统的同步性检测上,现有解决方案多是依赖调试工程师的经验,如使用一张纸放在互为镜像移动激光中间位置,然后移动激光灯,过程中观察移动过程中是否有效重合来进行同步性判断。又或者是,使用米尺或板尺单独测量单组激光线的位移,确定两组激光灯移动是否满足一定阈值。由此可见,现有的解决方案在对ctsim三维激光定位系统进行调试之前,均需要通过人工检测ctsim三维激光定位系统的同步性,极大地拉低了三维激光定位系统的调试效率。
4、因此,如何提高ctsim三维激光定位系统的同步性监测效率,以提高调试效率成为了亟需解决的技术问题。
技术实现思路
1、有鉴于此,本技术的主要目的在于提供一种激光同步检测装置、方法及系统,目的在于提高ctsim三维激光定位系统的同步性检测效率,以进一步提高调试效率。
2、本技术第一方面提供了一种激光同步检测装置,该装置包括:至少两组互为镜像的可移动激光模组;
3、可移动激光模组,用于接收控制台发送的控制指令,并根据控制指令执行病变区域定位任务;
4、可移动激光模组,还用于在执行病变区域定位任务的过程中移动模组,并实时采集可移动激光模组的模组位置信息;
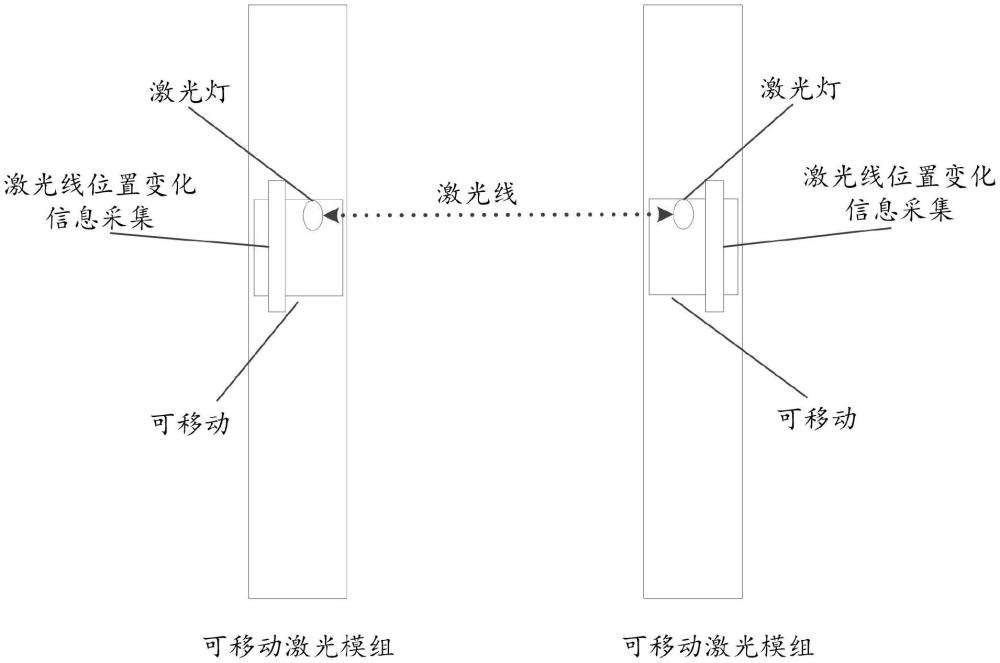
5、可移动激光模组,还用于在执行病变区域定位任务的过程中投射激光线,实时采集镜像的可移动激光模组投射的激光线,以得到镜像的可移动激光模组的激光线位置变化信息;
6、可移动激光模组,还用于将可移动激光模组的模组位置信息以及镜像的可移动激光模组的激光线位置变化信息发送至控制台,以使控制台根据至少两组互为镜像的可移动激光模组的激光线位置变化信息,对至少两组互为镜像的可移动激光模组进行同步检测。
7、在本技术第一方面的一些实现方式中,当至少两组互为镜像的可移动激光模组不同步时,至少两组互为镜像的可移动激光模组的激光线位置变化信息,用于控制台生成量化数据。
8、在本技术第一方面的一些实现方式中,量化数据用于控制台输出调整指导信息,调整指导信息包括以下至少一种信息:运动不同步行程定位调整信息、角度调整信息、力矩调整信息以及位移调整信息。
9、在本技术第一方面的一些实现方式中,激光线位置变化信息通过激光线位敏传感器实时采集。
10、在本技术第一方面的一些实现方式中,激光线位敏传感器设置于可移动激光模组的激光灯移动单元上,且与激光灯移动单元同步移动。
11、在本技术第一方面的一些实现方式中,激光线位敏传感器为psd位敏传感器或ccd相机或ccd光电器件。
12、本技术第二方面提供了一种激光同步检测方法,应用于激光同步检测装置,激光同步检测装置包括:至少两组互为镜像的可移动激光模组;
13、该方法包括:
14、可移动激光模组,接收控制台发送的控制指令,并根据控制指令执行病变区域定位任务;
15、可移动激光模组,在执行病变区域定位任务的过程中移动模组,并实时采集可移动激光模组的模组位置信息;
16、可移动激光模组,在执行病变区域定位任务的过程中投射激光线,实时采集镜像的可移动激光模组投射的激光线,以得到镜像的可移动激光模组的激光线位置变化信息;
17、可移动激光模组,将可移动激光模组的模组位置信息以及镜像的可移动激光模组的激光线位置变化信息发送至控制台,以使控制台根据至少两组互为镜像的可移动激光模组的激光线位置变化信息,对至少两组互为镜像的可移动激光模组进行同步检测。
18、本技术第三方面提供了一种激光同步检测系统,该激光同步检测系统包括:
19、控制器,通讯网络以及本技术第一方面所提供的任一激光同步检测装置;
20、控制台,通过通讯网络与激光同步检测装置连接,用于向激光同步检测装置发送控制指令;还用于接收激光同步检测装置返回的模组位置信息以及激光线位置变化信息,还用于根据激光线位置变化信息判断激光同步检测装置中至少两个互为镜像的可移动激光模组是否同步,激光线位置变化信息包括:至少两个互为镜像的可移动激光模组的激光线位置变化信息。
21、激光同步检测装置包括:至少两组互为镜像的可移动激光模组,可移动激光模组,用于接收控制台发送的控制指令,并根据控制指令执行病变区域定位任务;
22、其中,可移动激光模组,还用于:在执行病变区域定位任务的过程中移动模组,并实时采集可移动激光模组的模组位置信息;在执行病变区域定位任务的过程中投射激光线,实时采集镜像的可移动激光模组投射的激光线,以得到镜像的可移动激光模组的激光线位置变化信息;可移动激光模组,还用于将可移动激光模组的模组位置信息以及镜像的可移动激光模组的激光线位置变化信息发送至控制台;
23、通讯网络,用于传输控制指令、激光线位置变化信息以及模组位置信息。
24、在本技术第三方面的一些实现方式中,控制器还用于:
25、当至少两组互为镜像的可移动激光模组不同步时,根据至少两组互为镜像的可移动激光模组的激光线位置变化信息量,生成量化数据。
26、在本技术第三方面的一些实现方式中,控制器还用于:
27、根据量化数据输出调整指导信息,调整指导信息包括以下至少一种信息:运动不同步行程定位调整信息、角度调整信息、力矩调整信息以及位移调整信息。
28、本技术所提供的技术方案具有如下有益效果:
29、在本技术所提供的技术方案中,激光同步检测装置包括由至少两组互为镜像的可移动激光模组组成;首先,可移动激光模组在接收到控制台发送的控制指令之后,将根据控制指令执行相应的病变区域定位任务;然后,可移动激光模组在执行病变区域定位任务的过程中进行移动并发射激光线以进行病变区域定位,并实时采集自身的模组位置信息;除此之外,在执行病变区域定位任务的过程中,还将实时采集镜像的可移动激光模组投射过来的激光线,从而得到镜像的可移动激光模组的激光线位置变化信息;最后,激光同步检测装置中各组互为镜像的可移动激光模组将自身的模组位置信息以及镜像的可移动激光模组的激光位置变化信息发送至控制台,以便控制台根据互为镜像的两组可移动激光模组的激光位置变化信息进行同步检测。由此可见,本技术中的可移动激光模组具有提供同步检测数据的能力,该可移动激光模组在执行病变区域定位任务时,同时采集到镜像设置的可移动激光模组的激光线位置信息,并实时传输给控制器,控制器可利用各激光线位置变化信息检测是否同步,避免了现有技术中人工利用量尺或白纸确定同步性所带来的繁琐步骤,实现了cts im三维激光定位系统的自动化同步性检测,从而进一步提高了调试效率。
- 还没有人留言评论。精彩留言会获得点赞!