矿区大气生态环境与地面植被数据同步监测方法及系统与流程
本发明涉及矿区生态环境监测领域,尤其涉及一种矿区大气生态环境与地面植被数据同步监测方法及系统。
背景技术:
1、生态环境监测是生态环境预警的基础,也是制定国民经济发展计划和规划的重要依据。矿区开采活动对区域生态环境的扰动较大(尤其是露天煤矿的开采会对其周边植被造成破坏,进而严重影响其生态系统以及植被的固碳能力,不利于碳减排),并且在不同空间尺度上有不同的影响,且这些影响的持续时间各不相同。目前,对于矿山生态环境监测主要是集中在矿区附近的植被覆盖度(植被碳汇计算的重要数据)计算主要是通过实地测量法和遥感影像反演法,实地测量法需要设置很多观测站点,方法成本高、覆盖范围小,费时费力;遥感影像反演法是基于卫星遥感影像进行遥感反演,其主要注重大范围区域或包含矿区地区的宏观统计,对于矿区小范围更需要小尺度、精度较高与更深入细节的植被覆盖度计算,故此着眼研究矿区依赖拍照影像的小尺度、深入细节分析能够得到更为精准、颗粒度更小的植被覆盖度数据。矿区开采活动在矿区地面空间尺度上也有较大的影响,随着地面之上不同空间尺度具有着不同的影响,而现有技术是没有针对不同空间尺度的矿区大气生态监测,基于矿区的科学研究发现,矿区开采(有些煤炭开采还涉及到煤岩气)活动会产生粉尘、地下有毒气体(比如一氧化碳、甲醛等),随着开采会释放到大气中对大气造成危害,这些有害物质漂浮在空气中并呈空间尺度排布,如何进行空气中的有害物质监测也是矿区生态环境监测的重要方面,故此现有技术缺乏完善、全面、快捷且实现地空双生态的生态环境监测技术方案,不利于矿区的有效监测管理。
技术实现思路
1、本发明的目的在于解决背景技术所指出的技术问题,提供一种矿区大气生态环境与地面植被数据同步监测方法及系统,能够得到按分层高度的时间序列粉尘有机物数据集、有毒气体浓度数据集以及时间序列的植被覆盖度数据集,可以监测当前地空双生态环境数据,也能得到研究矿区监测分析区域内随时间的变化数据,实现了矿区地空双生态环境一体化监测及发展分析,为矿区生态环境提供可靠的数据支撑。
2、本发明的目的通过下述技术方案实现:
3、一种矿区大气生态环境与地面植被数据同步监测方法,其方法包括:
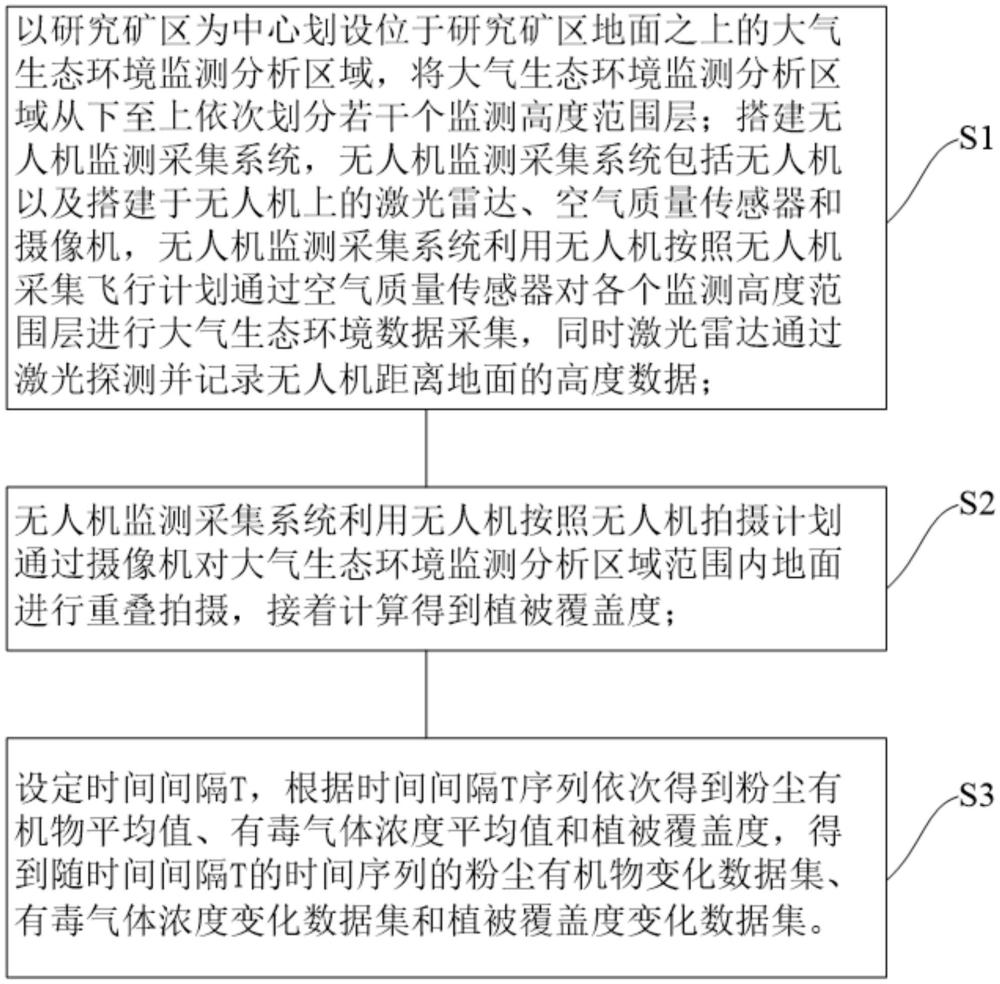
4、s1、以研究矿区为中心划设位于研究矿区地面之上的大气生态环境监测分析|区域,将大气生态环境监测分析区域从下至上依次划分若干个监测高度范围层;制定各个监测高度范围层所对应的无人机采集飞行计划,搭建无人机监测采集系统,无人机监测采集系统包括无人机以及搭建于无人机上的激光雷达、空气质量传感器和摄像机,无人机监测采集系统利用无人机按照无人机采集飞行计划通过空气质量传感器对各个监测高度范围层进行大气生态环境数据采集,同时激光雷达通过激光探测并记录无人机距离地面的高度数据,大气生态环境数据包括粉尘有机物数据ck和有毒气体浓度数据qk,ck表示第k监测高度范围层所有采样点的粉尘有机物数据集,根据ck计算得到第k监测高度范围层的粉尘有机物平均值ck平,qk表示第k监测高度范围层所有采样点的有毒气体浓度数据集,根据qk计算得到第k监测高度范围层的有毒气体浓度平均值qk平;
5、s2、制定无人机拍摄计划,无人机监测采集系统利用无人机按照无人机拍摄计划通过摄像机对大气生态环境监测分析区域范围内地面进行重叠拍摄,接着计算得到植被覆盖度;
6、s3、设定时间间隔t,根据时间间隔t序列按照步骤s1、步骤s2依次得到粉尘有机物平均值ck平、有毒气体浓度平均值qk平和植被覆盖度,得到随时间间隔t的时间序列的粉尘有机物变化数据集、有毒气体浓度变化数据集和植被覆盖度变化数据集。
7、为了更好地实现本发明,本发明还包括如下方法:
8、s4、构建大气生态环境监测区域三维地图,在大气生态环境监测区域三维地图的地平面表达当期的植被覆盖度,在大气生态环境监测区域三维地图的地平面之上按照监测高度范围层分层进行当期的粉尘有机物平均值ck平、有毒气体浓度平均值qk平表达,同时将当期的粉尘有机物数据集ck、有毒气体浓度数据集qk按照激光雷达所记录的高度数据归属对应表达在监测高度范围层中。
9、优选地,所述粉尘有机物数据集包括pm2.5数据集、pm10数据集和总挥发性有机化合物数据集三个子类,分别得到子类对应的子集ck,i,ck,i表示第k监测高度范围层、第i个子集所有采样点的数据集,接着获得各个子集ck,i的平均值;所述有毒气体浓度数据集包括二氧化碳浓度数据集、臭氧浓度数据集、一氧化碳浓度数据集、甲醛浓度数据集的子类,分别得到子类对应的子集qk,j,qk,j表示第k监测高度范围层、第j个子集所有采样点的数据集,接着获得各个子集qk,j的平均值;按照时间间隔t序列得到随时间间隔t的时间序列的子集ck,i平均值、子集qk,j平均值并分别得到各个子集对应的变化数据集。
10、优选地,构建大气生态环境时空三维坐标系,以时间为x轴坐标、以监测高度范围层为y轴坐标,以粉尘有机物平均值ck平或有毒气体浓度平均值qk平为z轴坐标进行数据表达。
11、优选地,构建大气生态环境时空三维坐标系,以时间为x轴坐标、以监测高度范围层为y轴坐标,以分类的子集ck,i平均值或分类的子集qk,j平均值为z轴坐标进行数据表达。
12、优选地,所述大气生态环境监测分析区域构建采用如下之一方法:
13、a1、以研究矿区的中心为圆心、r为半径构建研究矿区地面的圆形,并向上延伸高度h形成的圆柱体区域;
14、a2、以研究矿区的中心为圆心、r为半径构建一个研究矿区地面之上的半球体区域。
15、优选地,在步骤s2中,无人机监测采集系统中的摄像机为多光谱摄像机,对大气生态环境监测分析区域范围内地面进行重叠正投影拍摄得到影像数据集,然后进行拼接、校正处理得到研究矿区影像,对研究矿区影像逐像素进行如下灰度化处理:将研究矿区影像中按照像素解析r、g、b三个颜色通道,计算得到像素的灰度值exg,exg=2*g1-r1-b1,g1、r1、b1表示三个颜色通道所对应的数值;按照像素的灰度值exg进行像素的灰度化处理;
16、将研究矿区影像的像素设定具有l个灰度级数,先预设阈值k,将目标矿区影像的像素按照阈值k划分为c0、c1两个灰度类,然后计算得到研究矿区影像的平均灰度μ、c0类像素的平均灰度μ0、c1类像素的平均灰度μ1,然后按照如下公式计算类间方差δ2(k):
17、δ2(l)=ω0(μ-μ0)2+ω1(μ-μ1)2;其中ω0是c0类的像素占比比,ω1是c1类的像素占比;
18、更换预设阈值k并获取类间方差δ2(k)的极大值时的预设阈值k作为最优阈值t;将研究矿区影像中灰度值不小于t的像素点划分为植被,其余划分为非植被;
19、基于改进的双线性插值算法对研究矿区影像按照设定像元大小进行重采样处理,然后统计得到各个像元的植被覆盖度。
20、优选地,研究矿区影像的l个灰度级数从0~l-1,第i级灰度像素点数为ni,i位于0~l-1的范围内,研究矿区影像的像素总数为n,则研究矿区影像中第i级像素点的概率为研究矿区影像的平均灰度计算表达式为:c0类像素的平均灰度计算表达式为:c1类像素的平均灰度计算表达式为:
21、一种矿区大气生态环境与地面植被数据同步监测系统,包括无人机监测采集系统、研究矿区无人机飞行控制模块和数据分析处理模块,所述无人机监测采集系统包括无人机以及搭建于无人机上的激光雷达、空气质量传感器和摄像机,所述研究矿区无人机飞行控制模块以研究矿区为中心划设位于研究矿区地面之上的大气生态环境监测分析区域,将大气生态环境监测分析区域从下至上依次划分若干个监测高度范围层,同时制定各个监测高度范围层所对应的无人机采集飞行计划和制定无人机拍摄计划;无人机监测采集系统利用无人机按照无人机采集飞行计划通过空气质量传感器对各个监测高度范围层进行大气生态环境数据采集,大气生态环境数据包括粉尘有机物数据ck和有毒气体浓度数据qk,ck表示第k监测高度范围层所有采样点的粉尘有机物数据集,同时激光雷达通过激光探测并记录无人机距离地面的高度数据,无人机监测采集系统利用无人机按照无人机拍摄计划通过摄像机对大气生态环境监测分析区域范围内地面进行重叠拍摄;所述数据分析处理模块根据ck计算得到第k监测高度范围层的粉尘有机物平均值ck平,qk表示第k监测高度范围层所有采样点的有毒气体浓度数据集,根据qk计算得到第k监测高度范围层的有毒气体浓度平均值qk平,数据分析处理模块基于摄像机拍摄的数据计算得到植被覆盖度;所述数据分析处理模块设定时间间隔t,按照时间间隔t序列依次得到粉尘有机物平均值ck平、有毒气体浓度平均值qk平和植被覆盖度,得到随时间间隔t的时间序列的粉尘有机物变化数据集、有毒气体浓度变化数据集和植被覆盖度变化数据集。
22、优选地,本发明矿区大气生态环境与地面植被数据同步监测系统还包括数据展示模块,所述数据展示模块内部构建有大气生态环境监测区域三维地图,在大气生态环境监测区域三维地图的地平面表达当期的植被覆盖度,在大气生态环境监测区域三维地图的地平面之上按照监测高度范围层分层进行当期的粉尘有机物平均值ck平、有毒气体浓度平均值qk平表达,同时将当期的粉尘有机物数据集ck、有毒气体浓度数据集qk按照激光雷达所记录的高度数据归属对应表达在监测高度范围层中;所述数据展示模块内部还构建有大气生态环境时空三维坐标系,大气生态环境时空三维坐标系以时间为x轴坐标、以监测高度范围层为y轴坐标,以粉尘有机物平均值ck平或有毒气体浓度平均值qk平为z轴坐标进行数据表达。
23、本发明较现有技术相比,具有以下优点及有益效果:
24、(1)本发明利用无人机监测采集系统既实现分层大气生态环境数据监测,又实现基于研究矿区小尺度范围精细深入的图像数据采集与植被覆盖度计算,能够得到按分层高度的时间序列粉尘有机物数据集、有毒气体浓度数据集以及时间序列的植被覆盖度数据集,可以监测当前地空双生态环境数据,也能得到研究矿区监测分析区域内随时间的变化数据,实现了矿区地空双生态环境一体化监测及发展分析,为矿区生态环境提供可靠的数据支撑。
25、(2)本发明无人机监测采集系统利用无人机按照无人机采集飞行计划通过空气质量传感器对各个监测高度范围层进行pm2.5、pm10、总挥发性有机化合物、二氧化碳浓度、臭氧浓度、一氧化碳浓度、甲醛浓度等大气生态环境数据进行分层采集,有效实现了所设定监测分析区域在不同高度的大气生态环境监测数据,便于精确知晓矿区地面之上不同空间尺度的大气环境情况,有利于制定合理的防止措施与治理措施。
26、(3)本发明基于无人机正投影拍摄获得监测分析区域的影像数据,依次进行逐像素灰度处理,然后设定灰度级数划分为两个灰度类,根据类间方差极大值得到最优阈值,按照最优阈值对像素植被或非植被属性进行划分,进而计算得到各个像元的植被覆盖度,能够在小范围的研究矿区监测分析区域进行精确监测,然后随时间进行地面植被监测,实现对地面植被数据有效监测和管理。
27、(4)本发明构建大气生态环境监测区域三维地图对当期植被覆盖度及随时间的植被覆盖度变化进行地图演变表达,构建大气生态环境时空三维坐标系,能够对粉尘有机物平均值、有毒气体浓度平均值以及多个具体子类的数据进行当期与时间尺度上的变化推演,便于进行危害趋势分析。
- 还没有人留言评论。精彩留言会获得点赞!