三自由度独立加载下的假肢检测平台及检测方法与流程
本发明涉及康复工程,尤其是涉及一种三自由度独立加载下的假肢检测平台及检测方法。
背景技术:
1、目前,全球下肢截肢者超过4000万人,下肢假肢是下肢截肢者部分恢复其生物肢体功能,重回社会的重要工具。
2、传统的下肢假肢设计过程依赖于实验和经验迭代设计,最常见的下肢假肢性能评估方法是采用受试者测试,涉及受试者主观因素,在受试者之间存在很高的可变性,且测试结果不可重复。为客观评价下肢假肢综合机械性能与截止患者使用体验之间的定量关系,一种有效的方法是使用下肢假肢测试装置进行测试。
3、目前仅有一种双工位假肢踝足装置测试机,该测试机采用四通伺服控制协同加载,一次可以对两个下假肢踝足装置进行动态试验检测,可用于模拟人正常行走时足跟着地和足尖即将离地时脚板的变形与受力情况。但由于水平、垂直方向加载力无法解耦,不能在行走全步态过程中对下肢假肢性能进行测试。
技术实现思路
1、本发明的发明目的是为了克服现有技术中的双工位假肢踝足装置测试机不能在行走全步态过程中对下肢假肢性能进行测试的不足,提供了一种三自由度独立加载下的假肢检测平台及检测方法。
2、为了实现上述发明目的,本发明采用以下技术方案:
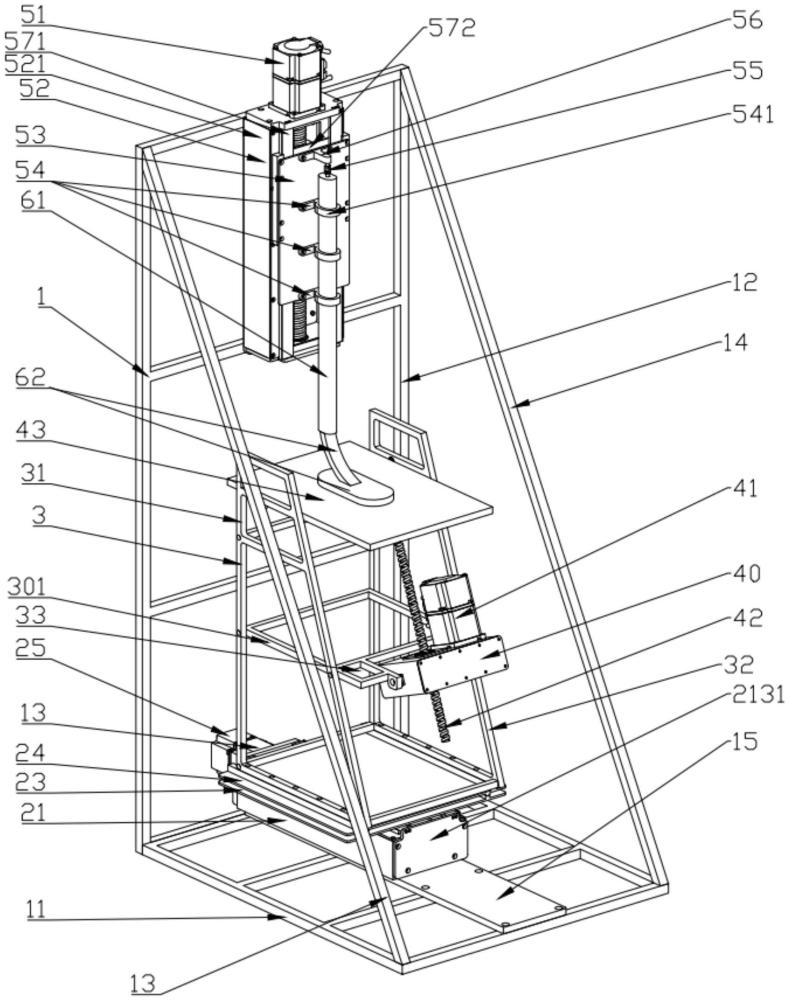
3、一种三自由度独立加载下的假肢检测平台,包括机架、设于机架下部的水平单元,与水平单元连接并位于机架中的支架,设于支架上的摇杆单元和设于机架上部的垂直单元;所述水平单元包括由下至上排列的水平滚珠丝杠副、水平移动板和水平滑动板;水平滚珠丝杠副与机架下端连接,水平伺服电机的输出轴与水平滚珠丝杠副中的水平滚珠丝杠一端固定连接,设于水平滚珠丝杠上的螺套上部伸出滚珠丝杠副上端并与水平移动板固定连接,水平移动板上表面和水平滑动板下表面横向滑动连接,水平移动板和水平滑动板之间设有水平拉压传感器;摇杆单元包括设于支架上的减速器、摇杆伺服电机、摇杆滚珠丝杠和旋转板;所述减速器的高速级齿轮的轴与摇杆伺服电机的输出轴连接,减速器的低速级齿轮的轴的内螺母与摇杆滚珠丝杠滚动连接,摇杆滚珠丝杠上端通过摇杆拉压传感器与铰链连接,铰链与旋转板的下表面的右下部连接,旋转板前侧和后侧分别与支架转动连接;垂直单元包括垂直伺服电机、垂直滚珠丝杠副、垂直加载板、设于垂直加载板上的假腿安装架、竖直拉压传感器和传感器安装件;垂直滚珠丝杠副与机架上部固定连接,垂直伺服电机的输出轴与垂直滚珠丝杠副的垂直滚珠丝杠一端连接,垂直滚珠丝杠上的连接机构与垂直滚珠丝杠螺纹配合连接,连接机构与垂直加载板连接,假腿安装架包括若干个上下排列的安装套,传感器安装件位于假腿安装架上方的垂直加载板上,竖直拉压传感器位于传感器安装件和假腿上端之间,与假腿下端连接的假脚与旋转板上表面接触;还包括依次电连接的上位机、控制卡和采集卡,控制卡分别与水平伺服电机、摇杆伺服电机和垂直伺服电机电连接,采集卡分别与水平拉压传感器、摇杆拉压传感器、竖直拉压传感器、水平伺服电机的编码器、摇杆伺服电机的编码器和垂直伺服电机的编码器电连接。
4、水平伺服电机的输出轴带动水平滚珠丝杠一端固定连接,螺套沿水平滚珠丝杠左右运动带动水平移动板运动,水平移动板推拉水平拉压传感器,水平拉压传感器推拉水平滑动板左右运动,水平拉压传感器记录水平方向的力;水平伺服电机的编码器记录水平伺服电机的输出轴转动的角度,利用角度和位移之间的对应关系,得出水平移动板的位移;
5、摇杆伺服电机的输出轴驱动高速级齿轮的轴旋转,高速级齿轮与低速级齿轮啮合,带动低速级齿轮的轴旋转,内螺母通过螺钉与低速级齿轮的轴固定,内螺母与低速级齿轮的轴一起旋转;内螺母带动摇杆滚珠丝杠旋转,摇杆滚珠丝杠将旋转运动变为直线运动,推拉摇杆拉压传感器,摇杆拉压传感器拉动铰链,从而使旋转板产生旋转运动,摇杆拉压传感器记录沿摇杆滚珠丝杠方向的力;摇杆伺服电机的编码器记录摇杆伺服电机的输出轴转动的角度,利用输出轴转动的角度和旋转板的旋转角度的对应关系,得到旋转板的旋转角度;
6、竖直伺服电机带动竖直滚珠丝杠旋转,连接机构带动垂直加载板上下运动;竖直拉压传感器带动假腿跟随垂直加载板一起上下运动,竖直拉压传感器测量旋转板施加在假脚上的地面支反力;竖直伺服电机的编码器记录竖直伺服电机转动的角度,根据角度和位移的对应关系,得到假脚的垂直位移。
7、本发明将全步态过程中下肢假肢的水平、垂直方向加载力和垂直面转动(假脚屈曲角度)加载的三自由度解耦加载,脱离下肢假肢受试者测试的人体特征覆盖不全限制及主观评价限制,从而实现在行走全步态过程中对下肢假肢性能进行测试。
8、可见,本发明可在水平、垂直和垂直面翻转三个自由度上独立加载,可实现在行走全步态过程中对下肢假肢综合机械性能进行测试。
9、作为优选,螺套上部设有伸出水平滚珠丝杠副上端的两个连接块,水平滚珠丝杠副上设有两条导轨,两条导轨之间设有滑板,滑板分别与水平移动板和所述连接块固定连接。
10、螺套沿水平滚珠丝杠左右运动,螺套通过两个连接块带动滑板沿着两条导轨左右运动。
11、作为优选,水平滚珠丝杠副包括上端开口的长方形壳体,设于长方形壳体上的盖板;盖板上设有便于两个连接块伸出的长条形开口,水平伺服电机通过法兰与长方形壳体左端连接,长方形壳体上设有右端盖,所述导轨两端分别与法兰和右端盖连接,水平滚珠丝杠两端分别通过两个深沟球轴承与长方形壳体两端连接。
12、长条形开口、法兰、右端盖和两个深沟球轴承的设置,使两条导轨被稳定的安装,水平移动板的左右运动更加稳定。
13、作为优选,所述导轨中部通过限位条与水平移动板固定连接,水平移动板上表面上设有两条横向延伸的下凸条,下凸条的横截面上部呈v形,水平滑动板下表面上设有两条上凸条,上凸条的横截面下部呈三角形,所述上凸条下部伸入对应的下凸条上部中。
14、限位条与水平移动板固定连接,使导轨中部不容易在重力的作用下下降,滑板的滑动不会遇到障碍;两条上凸条和两条下凸条的设置,使水平移动板和水平滑动板之间可以沿着固定的导向滑动,使检测更加稳定。
15、作为优选,所述机架包括底部水平矩形框架,左部竖直框架,用于连接底部水平矩形框架的右前端和左部竖直框架的上前端的前斜支撑杆,用于连接底部水平矩形框架的右后端和左部竖直框架的上后端的后斜支撑杆;水平滚珠丝杠副通过长方形板与底部水平矩形框架上表面连接。
16、机架的结构设置,使机架更加轻量化,并使机架满足强度和稳定性的要求。
17、作为优选,所述支架包括下框长的前梯形框架和后梯形框架,前梯形框架和后梯形框架的下端均与水平滑动板固定连接,前梯形框架中部和后梯形框架中部之间设有安装框架,安装框架呈矩形,安装框架右侧设有两个u形架,减速器两侧分别通过两个深沟球轴承与两个u形架转动连接。
18、支架的结构设置,使支架更加轻量化,并使支架满足强度和稳定性的要求;两个u形架和两个深沟球轴承的设置,使减速器安装稳定,转动方便。
19、作为优选,竖直滚珠丝杠副包括右侧开口的条形壳体;所述连接机构包括设于条形壳体的开口处的两条竖轨,设于两条竖轨之间的竖向滑动板,设于竖直滚珠丝杠上的外螺母;外螺母右侧与竖向滑动板连接,竖向滑动板与垂直加载板连接。
20、外螺母带动竖向滑动板沿两条竖轨上下运动,竖向滑动板带动垂直加载板上下运动,运动过程更加稳定可靠。
21、一种三自由度独立加载下的假肢检测平台的检测方法,包括如下步骤:
22、步骤8-1,将假腿放入各个安装套中,各个安装套使假腿只能沿垂直方向运动,将假脚安装到假腿下端;上位机设置水平单元、摇杆单元和垂直单元的加载曲线,设置水平单元、摇杆单元和垂直单元的力加载范围;
23、步骤8-2,控制卡控制各单元电机按固定角速度旋转,采集卡记录各电机编码器、驱动器数据和各单元拉压传感器数据,并上传上位机;
24、步骤8-3,上位机判断各个单元是否达到力加载范围的最大加载值,如果没有达到力加载范围的最大加载值,转入步骤8-2;否则,转入步骤8-4;
25、步骤8-4,标定水平伺服电机、摇杆伺服电机和垂直伺服电机的控制信号的加载力;
26、步骤8-5,控制卡按照设定的加载曲线给定各个伺服电机的控制信号;
27、步骤8-6,各个单元同步工作:
28、水平单元:
29、水平伺服电机带动水平滚珠丝杠、滑板和水平移动板左右运动,水平移动板与水平滑动板之间产生相对位移,水平移动板推拉水平拉压传感器,水平拉压传感器推拉水平滑动板左右运动,水平拉压传感器记录水平方向的力;水平伺服电机的编码器记录水平伺服电机的输出轴转动的角度,利用角度和位移之间的对应关系,得出水平移动板的位移;
30、摇杆单元:
31、摇杆伺服电机的输出轴驱动高速级齿轮的轴旋转,高速级齿轮与低速级齿轮啮合,带动低速级齿轮的轴旋转,内螺母通过螺钉与低速级齿轮的轴固定,内螺母与低速级齿轮的轴一起旋转;内螺母带动摇杆滚珠丝杠旋转,摇杆滚珠丝杠将旋转运动变为直线运动,摇杆滚珠丝杠推拉摇杆拉压传感器,摇杆拉压传感器拉动铰链,从而使旋转板产生旋转运动,摇杆拉压传感器记录沿摇杆滚珠丝杠方向的力;摇杆伺服电机的编码器记录摇杆伺服电机的输出轴转动的角度,利用输出轴转动的角度和旋转板的旋转角度的对应关系,得到旋转板的旋转角度;
32、竖直单元:
33、竖直伺服电机带动竖直滚珠丝杠旋转,连接机构带动垂直加载板上下运动;竖直拉压传感器带动假腿跟随垂直加载板一起上下运动,竖直拉压传感器测量旋转板施加在假脚上的地面支反力;竖直伺服电机的编码器记录竖直伺服电机转动的角度,根据角度和位移的对应关系,得到假脚的垂直位移;
34、步骤8-7,采集卡采集水平拉压传感器、摇杆拉压传感器、竖直拉压传感器、水平伺服电机的编码器、摇杆伺服电机的编码器和垂直伺服电机的编码器的测量值,并上传至上位机;每个伺服电机的编码器检测本伺服电机的输出轴的旋转角度并传回本伺服电机的驱动器,驱动器通过位置、速度和力矩三种方式对本伺服电机进行控制;
35、步骤8-8,将水平伺服电机、摇杆伺服电机和垂直伺服电机的控制信号的加载力分别导入水平单元、摇杆单元和垂直单元的加载曲线中,计算各个伺服电机的控制信号值并输入控制卡中,控制卡控制各个伺服电机的同步加载;
36、步骤8-9,上位机判断各单元加载曲线是否加载结束,如果还需要加载,转入步骤8-6;否则,结束检测。
37、作为优选,竖直滚珠丝杠副包括右侧开口的条形壳体;所述连接机构包括设于条形壳体的开口处的两条竖轨,设于两条竖轨之间的竖向滑动板,设于竖直滚珠丝杠上的外螺母;外螺母右侧与竖向滑动板连接,竖向滑动板与垂直加载板连接;连接机构带动垂直加载板上下运动由如下步骤替换:外螺母带动竖向滑动板沿两条竖轨上下运动,竖向滑动板带动垂直加载板上下运动。
38、因此,本发明具有如下有益效果:可实现水平、垂直、垂直面转动三自由度运动与加载;可实现不同人体特征下肢全步态过程载荷模拟。
- 还没有人留言评论。精彩留言会获得点赞!