一种基于增强现实的智能穿刺引导装置
本发明涉及医疗穿刺,具体为一种基于增强现实的智能穿刺引导装置。
背景技术:
1、过敏性鼻炎,也称变应性鼻炎困扰着全球大约三分之一人群,目前公认的患病原因包含环境及遗传因素。随着环境污染及气候恶化加剧,感冒多发且迁延难愈,致使鼻炎的发病率逐年上升,且越发难治。药物治疗容易反复,长时间使用容易产生耐受;手术治疗痛苦大,费用高,而且容易复发。毫针刺入翼腭窝技术治疗鼻炎的方法通过针刺技术,将针刺入位于颅底的翼腭窝内,旨在通过抑制副交感神经和激活交感神经来恢复失调的神经系统功能,并作为主要治疗技术而逐渐推广。国内研究主要围绕下关穴、颧骼穴以及“治鼻”穴等体表进针位置确定翼腭窝。然而,由于个体差异和解剖结构的复杂性,盲刺时不可避免反复、多次地进针,容易引发出血、血肿等严重并发症。
2、随着人工智能技术及多学科交叉融合观念发展,信息技术与中医学科亦相互协作。蝶腭神经节在医学影像上位于骨质结构翼腭窝内,借助数字图像处理技术,结合医学影像信息,智能定位翼腭窝位置并规划有效穿刺路径能够提高穿刺准确率。然而,在头部ct影像中,翼腭窝结构形状较小、个体差异较大,且周围解剖结构复杂,影像上无明显边缘包围,对其精准定位极具挑战。其次,基于深度学习方法在面临小尺寸目标时,过多的下采样步骤导致了关键信息的丢失,削弱模型对小目标的检测灵敏度和准确性。此外,在自动化临床针刺路径规划的过程中,筛选有效的入针点面临着效率低下的问题。因此,对于针刺治疗过敏性鼻炎而言,在术前准确识别、定位针刺目标区域翼腭窝并自动规划针刺路径显得尤为关键。目前还未见有基于计算机辅助及医学影像计算技术引导翼腭窝穿刺的相关研究,国内外相关产品仍是空白。鉴于此,结合人工智能技术研究一种基于增强现实的智能穿刺引导装置。
技术实现思路
1、本部分的目的在于概述本发明的实施方式的一些方面以及简要介绍一些较佳实施方式。在本部分以及本技术的说明书摘要和发明名称中可能会做些简化或省略以避免使本部分、说明书摘要和发明名称的目的模糊,而这种简化或省略不能用于限制本发明的范围。
2、因此,本发明的目的是提供一种基于增强现实的智能穿刺引导装置,术前准确识别、定位针刺目标区域翼腭窝并自动规划针刺路径,提高手术的准确性以及安全性。
3、为解决上述技术问题,根据本发明的一个方面,本发明提供了如下技术方案:
4、一种基于增强现实的智能穿刺引导装置,其包括:
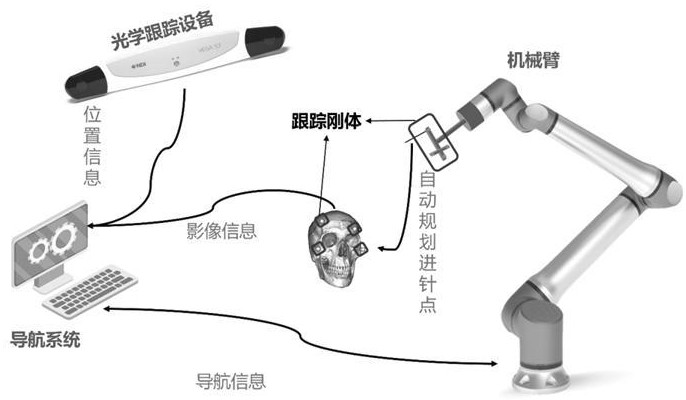
5、导航系统,获取患者头部ct影像、根据ct影像依次对患者皮肤入针区域分割、关键组织三维重建、构建临床硬性约束条件和临床软性约束条件以及帕累托优化路径规划确定毫针刺入翼腭窝手术的最优路径;
6、机械臂,接收导航系统发出的毫针刺入翼腭窝手术的最优路径指令,并根据指令引导穿刺针到达指定的穿刺位置;
7、光学跟踪设备,捕获患者头部以及机械臂引导孔的实时位置并传输给导航系统,将手术器械周围的手术区域在电脑屏幕上实时的绘制渲染出来,实现导航系统对穿刺手术的实时监测。
8、作为本发明所述的一种基于增强现实的智能穿刺引导装置的一种优选方案,其中,所述导航系统内置有基于密集空间金字塔网络模型,所述基于密集空间金字塔网络模型包括编码模块和解码模块,并通过集成注意力机制和空间金字塔结构来增强其性能,在网络的左侧,编码模块通过下采样提取输入图像的特征,右侧的解码模块通过三线性插值来增加特征图的分辨率。
9、作为本发明所述的一种基于增强现实的智能穿刺引导装置的一种优选方案,其中,所述基于密集空间金字塔网络模型采用denseaspp结构,并调整空洞率,引入se通道注意力模块,且在跳跃连接的第一层加入了空间注意力模块。
10、作为本发明所述的一种基于增强现实的智能穿刺引导装置的一种优选方案,其中,导航系统对患者皮肤入针区域分割的步骤如下:采用阈值法以及区域增长法进行皮肤入针区域分割,通过分析图像的直方图找到一个可以明显区分皮肤和非皮肤区域的像素强度值,此时图像被分为两部分:皮肤区域和非皮肤区域。
11、作为本发明所述的一种基于增强现实的智能穿刺引导装置的一种优选方案,其中,导航系统对关键组织三维重建的步骤如下:首先,通过选择合适的阈值来处理ct图像数据,然后运用区域增长技术消除噪点及非颅骨区域,最后,采用面绘制技术完成颅骨的三维重建。
12、作为本发明所述的一种基于增强现实的智能穿刺引导装置的一种优选方案,其中,临床硬性约束条件包括针刺长度限制、关键组织规避以及入针角度硬约束;
13、针刺长度限制约束如下:在毫针刺入翼腭窝手术中,以点作为针刺点,定义针刺路径长度为点到颅底翼腭窝中心偏上点的距离,通过下式过滤不满足针刺长度要求的候选路径;
14、;
15、关键组织规避如下:利用有向包围盒结构来对通过图像分割得到的骨质结构进行碰撞检测,使用vtk中intersectwithline方法检测一条由两点定义的线段是否与一个几何体相交,intersectwithline方法通过计算针刺路径与骨质结构的潜在交点,一旦检测到相交,即自动调整路径以寻找安全无冲突的新路线;
16、入针角度硬约束如下:通过计算入针点及其周边区域的平面方程得到针刺角度:选取入针点附近最近的个数据点作为近邻点,使用这些点来进行平面拟合,平面的方程形式为,将等式两边同时乘以的转置矩阵,然后再乘以系数矩阵的逆矩阵,从而求解得到:
17、;
18、该平面法向量为,路径的方向向量为,计算出皮肤表面入刺点到目标点的针刺路径与该点处的皮肤平面法向量的夹角a为:
19、;
20、当夹角时,针刺路径与皮肤之间的夹角,当夹角时,针刺路径与皮肤之间的夹角,此处只保留的刺入路径。
21、作为本发明所述的一种基于增强现实的智能穿刺引导装置的一种优选方案,其中,临床软性约束条件包括针刺路径长度约束、针刺路径与关键组织距离约束以及入针角度约束;
22、针刺路径长度约束归一化后表示为:
23、;
24、其中,代表颅内距离的归一化结果,该值越低代表在颅内距离越短,代表当前路径的颅内长度,代表所有可行针刺路径中距离最短的针刺路径,代表所有可行针刺路径中距离最长的针刺路径;
25、针刺路径与关键组织的距离约束归一化后表示为:
26、;
27、其中,代表针刺路径与关键组织之间的距离归一化结果,代表当前针刺路径与关键组织的距离,代表所有可行针刺路径中与关键组织最短的距离,代表所有可行针刺路径中与关键组织最长的距离;
28、入针角度约束条件归一化后表示如下:
29、;
30、其中,代表针刺角度归一化后的结果,代表当前路径与皮肤表面的针刺角度,代表所有可行路径中针刺角度的最小值,代表所有可行路径中针刺角度的最大值。
31、作为本发明所述的一种基于增强现实的智能穿刺引导装置的一种优选方案,其中,帕累托优化路径规划具体步骤如下:利用帕累托优化策略,将针刺路径长度约束、针刺路径与关键组织距离约束以及入针角度约束的三项软性约束条件纳入考虑作为优化的子目标,针对三个风险子目标首先分别获取每对子目标组合的帕累托前沿,通过识别在所有帕累托前沿中出现频率最高的点,找到一个综合考虑所有风险子目标的最优解,即最佳的针刺路径。
32、作为本发明所述的一种基于增强现实的智能穿刺引导装置的一种优选方案,其中,捕获患者头部以及机械臂引导孔的实时位置并传输给导航系统,将手术器械周围的手术区域在电脑屏幕上实时的绘制渲染出来,实现导航系统对穿刺手术的实时监测具体如下:
33、将虚拟三维重建图像坐标系与患者坐标系统一到光学跟踪设备坐标系下;
34、获取虚拟图像的特征点的坐标,利用带有跟踪球的探针获取跟踪系统坐标系特征点的位置信息;
35、采用基于单位四元数的注册算法完成坐标系注册;
36、采用基于gpu负载均衡的三维场景分区实时渲染,将手术器械周围的手术区域在电脑屏幕上实时的绘制渲染出来。
37、与现有技术相比,本发明具有的有益效果是:本发明结合深度学习和传统导航技术,通过自动识别体表入针区域及靶区域,根据进针需求及颅内结构设置避障约束,最终规划出最优穿刺路径,对基于深度学习的颅内翼腭窝自动域分割结果,提出一种基于解剖结构先验知识的翼腭窝刺入路径自动规划方法,将穿刺针引导装置固定于机械臂,通过光学跟踪设备捕获患者头部、机械臂引导孔的实时位置,实现智能、实时穿刺引导,提高穿刺手术安全性及准确性。
- 还没有人留言评论。精彩留言会获得点赞!