内窥镜系统的制作方法
本公开涉及用于在相对不可接近的空间中观察和工作的内窥镜检查器械;并且在一些方面涉及用于在体内的密闭解剖空间中使用内窥镜或关节镜等进行操作的内窥镜器械。
背景技术:
1、内窥镜器械在医学中的使用(其允许在难以接近的空间中进行远程观察和操作)已经非常成熟。这些器械在汽车、航空、管道设施、电子设备和许多其它行业也是有用的。在医学或兽医实践领域,内窥镜检查或关节镜检查通常用于在期望最小的切口或不期望切口时观察或治疗解剖区域,或者用于避免干扰附近的组织。例如,在骨科中,可以使用通过一个或多个小皮肤切口而引入到关节中的一个或多个关节镜器械来得到诸如膝盖或肩膀的关节的状况。这些器械也可以用于修复各种关节内组织。用于观察和修复这些解剖区域的开放手术的标准技术可能相比较而言更费时(与患者的更大的风险和创伤相关联),并且可能与更长的恢复时间相关联。另外,与开放手术相关联的麻醉可能更加复杂、有风险和昂贵。为了改善的视场,内窥镜可以配备有主动柔性的远侧节段,该远侧节段能够由用户在器械的手柄端处进行控制。当器械的端头被定位在可能无法允许使内窥镜的远侧节段挠曲所需的运动范围的受限空间中时,这可能不是有效的选择。在医学应用中,一个这样的示例包括关节内手术。一般而言,在使用具有主动柔性的远侧节段的器械是不切实际的情况下,使用具有刚性插入轴的器械是优选的。非柔性轴可以提供改进的光学或图像再现、器械内用于附加功能的增加的空间以及更大的耐用性。但是,刚性内窥镜或关节镜具有有限的视场,并且可能需要频繁地重新定位或旋转以增加视场。一些内窥镜或关节镜必须从患者体内取出以使零件换出,以便改变视场。插管系统可以有助于这种方法,但也可能增加程序的复杂性和切口的尺寸。这些限制可能会降低操作员效率,增加手术时间并可能增加医源性损伤的风险。在医学和其它应用中,使内窥镜具有增大的或可变的视场而不使用主动柔性远侧节段将是有利的。在单个导管内组合功能以便减小内窥镜的轴的总直径也是有利的。另外,目前的器械在重复使用、清洁和/或灭菌后在功能和光学质量方面容易下降。一种制造和组装成本足够低以使其非重复使用具有经济性的内窥镜设计也是有利的。重复清洁或灭菌和重新包装的成本将被消除,并且也可能使一次性设备的无菌性、质量和可靠性标准化更容易。
技术实现思路
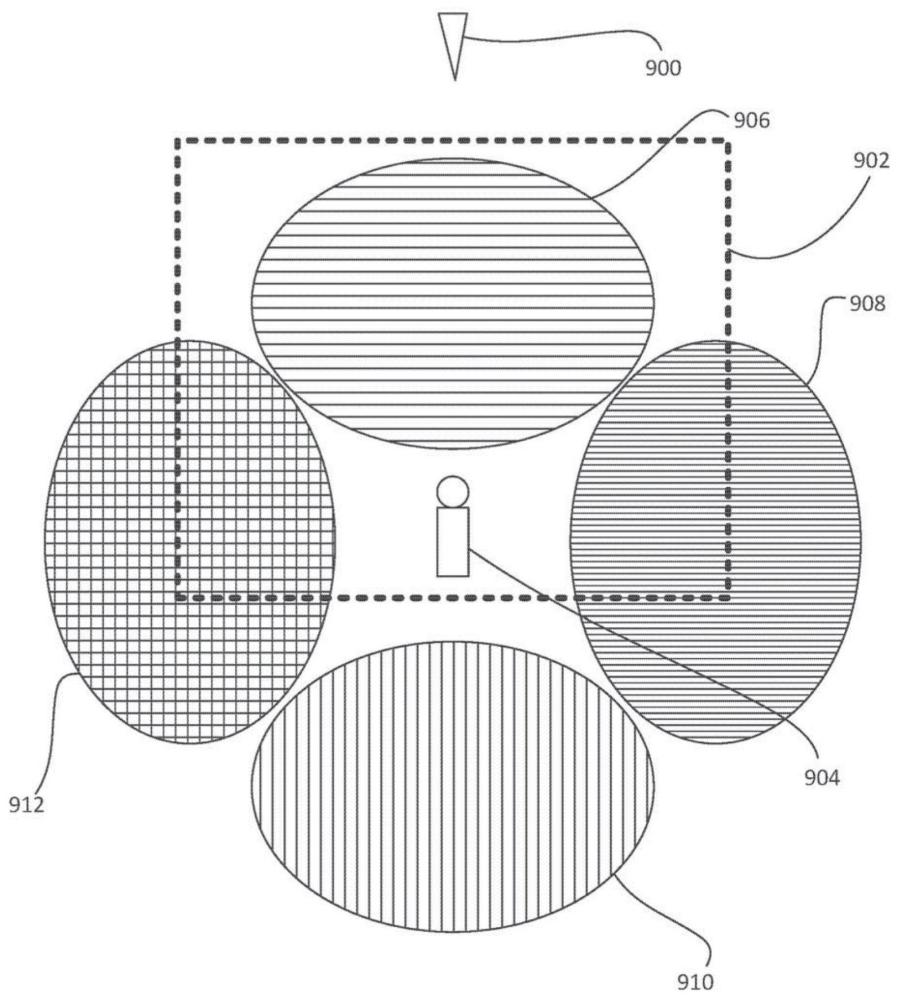
1、在一方面,一种内窥镜具有两部分式手柄,远侧手柄壳体能够相对于近侧手柄壳体旋转,该远侧手柄壳体连接到具有远侧安装的摄像头传感器的内窥镜轴,该近侧手柄壳体能够由用户的手抓握。摄像头传感器可以安装在光学壳体中,该光学壳体将摄像头定位成使得摄像头的光轴相对于所述轴、光学壳体和摄像头传感器的旋转轴线维持固定的非零角度。远侧壳体的旋转导致由摄像头传感器产生的图像的旋转,除非使用跟踪远侧壳体相对于预定地平线的旋转程度的信号来校正该图像旋转。虽然在近侧壳体和远侧壳体两者一起旋转的情况下可以执行这种图像旋转校正,但是当远侧壳体相对于近侧壳体旋转时,实施该图像旋转校正可能更有用。这可以通过在近侧壳体的覆盖pcb的内壁中安装磁体来实现,该pcb附接到远侧壳体,该pcb包括磁性位置传感器,例如三轴绝对位置传感器。在远侧壳体(和所附接的摄像头传感器)旋转时,处理器接收来自位置传感器的输入,并使图像阵列在相反方向上旋转大约相等的量,使得所显示的图像维持固定的角度定向。通过这种布置,在摄像头围绕旋转轴线从起始角度定向旋转到第二角度定向时,所显示的图像从第一视场平移到不同的第二视场。控制器还可以在所显示的图像的周边处生成并显示方向指针,以通知观察者或用户摄像头传感器相对于手柄的近侧壳体的实际旋转位移。在实施例中,摄像头的光轴可以相对于旋转轴线以30度和70度之间的角度固定。摄像头的光轴的非零角度与角位置信号相结合而允许来自摄像头的图像的视觉显示从可变视场的旋转图像变换到可变视场的平移图像(translating image)。处理器可以被配置成使来自旋转传感器的旋转信号平滑,使得在摄像头旋转减速时比在摄像头旋转加速时应用更大的平滑化。
2、上述系统不必限于内窥镜或关节镜。该系统可以适于应用到具有相对于其旋转轴线处于非零角度的光轴的任何可旋转摄像头。
3、在另一方面,用于内窥镜轴的远端的光学壳体可以包括模制构件,该模制构件被构造成部分地包围摄像头传感器和光源,以相对于内窥镜轴的远端的纵向轴线固定摄像头传感器和光源的角位置,并且将摄像头传感器和光源固定在包括内窥镜轴的圆柱形护套的远端内。模制构件可以具有外径,以提供与所述轴的护套的一部分的无泄漏密封接合,并且可以包括形成在模制构件的外表面上的多个通道,以在内窥镜轴中的流体通道和内窥镜轴的外表面之间提供一个或多个液体流路。摄像头可以包括邻近传感器的透镜,并且光学壳体可以包括透镜孔口,透镜可以通过该透镜孔口在内窥镜轴的远端处接收光。光源可以包括位于透镜旁边的发光二极管,并且光学壳体可以包括led孔口,led通过该led孔口将光投射到内窥镜轴的远端外部的区域。摄像头传感器可以安装在摄像头传感器印刷电路板上,摄像头传感器印刷电路板被包围在光学壳体中。光源可以被安装在光源印刷电路板上,该光源印刷电路板被包围在光学壳体中。光源可以包括安装在光源印刷电路板上的发光二极管,并且光源印刷电路板可以包括孔口,邻近摄像头传感器的透镜可以通过该孔口突出。护套可以终止于靠近光学壳体的末端(termination)的位置处,并且模制构件的外表面上的一个或多个通道可以在护套的末端处与光学壳体和护套之间的一个或多个侧向孔口连通。护套可以包括在内窥镜轴的远端处靠近护套的末端的冲洗孔口,并且该冲洗孔口可以与光学壳体的所述一个或多个通道流体连通。冲洗流体的流动路径可以在模制光学壳体的过程中形成。在实施例中,顶侧流路在邻近摄像头传感器定位的摄像头传感器透镜旁边的一个或多个孔口中将流体流从内窥镜轴的远侧端头引导出。来自这些孔口的流体流有助于冲洗掉可能接触透镜表面(从而干扰摄像头传感器的操作)的任何气泡、碎片或其它材料。此外,还可以在光学壳体中形成侧向侧流路,以将一些冲洗流体从内窥镜的远侧轴的靠近摄像头-透镜-led组件的侧向和下部孔口中引导出。护套和光学壳体可以被构造为插入到套管针中,该套管针具有远侧开口以允许光到达摄像头传感器并允许所述光源发射光,并且该套管针可以包括与护套的冲洗孔口对准的套管针孔口。
4、处理器还可以应用滤波器来减小位置传感器信号中生成的噪声的影响以及由用户的无意的手移动或颤动所引起的图像中的任何微小位置变化的影响。旋转图像稳定可以通过多种滤波技术来实现——或者在位置传感器信号的模拟阶段、在其数字转换之后,或者甚至在旋转期间调节(mediating)图像的显示的控制器软件代码中。可以使用多种低通滤波技术中的一种低通滤波技术对具有大量高频分量的微小旋转移动进行滤波。为了提高显示控制器对用户的旋转输入的响应性,控制器可以确定摄像头传感器是否以相对高的速度、相对高的加速度或减速度旋转,或者旋转信号频谱是否朝向低频分量被更重地加权。如果是这样,则可以实时调整控制器的低通滤波系数,以降低其影响,使得在开始旋转且维持旋转时,能够以减少的延迟显示图像旋转校正。在用户接近完成摄像头旋转时,或者在用户试图将摄像头传感器维持在固定位置时,控制器可以通过旋转速度测量或旋转加速度测量,或者通过信号的频谱分析,来确定应该开始对误差加重的旋转信号或高频加重的旋转信号进行更大的滤波。
5、在一个方面,旋转传感器可以被配置成测量摄像头围绕旋转轴线的旋转角度。处理器可以被配置成对来自旋转传感器的旋转数据进行滤波,以使显示的图像的旋转平滑。并且滤波器可以被配置成在摄像头旋转减速时比在摄像头旋转加速时提供更大的平滑化(smoothing)。该滤波器可以是低通滤波器,并且平滑化可以与低通滤波器的转折频率(corner frequency)具有反比关系。如果摄像头以恒定速度旋转,则滤波器可以维持所显示的图像的旋转的恒定平滑化。
6、还可以通过所显示的图像饱和度的选择性增强来增强所显示的图像的质量。在一次性内窥镜中,可以通过选择性地加重图像的饱和度而不降低白色的强度来提高低成本摄像头传感器的图像质量。像素的饱和度通过其在色调、饱和度、值(hsv)颜色空间中的饱和度因子和其在色调、饱和度、亮度(hsl)颜色空间中的亮度因子来增强。在一个方面,一种处理图像的方法可以包括:将hsv值分配给hsv颜色空间中的图像数据的像素,该像素的饱和度位于饱和度数的预定义范围内;将hsl值分配给hsl颜色空间中的图像数据的像素,该像素的亮度位于亮度数的预定义范围内。处理器可以计算包括在0和1之间的分数的第一因子,该第一因子的分数由以饱和度数的预定义范围的下半部中的数为中心的概率分布确定。处理器可以计算包括在0和1之间的分数的第二因子,该第二因子的分数由以亮度数的预定义范围的中部中的数为中心的概率分布确定。通过将hsv颜色空间中的像素的分配的饱和度乘以如下的值来调整hsv颜色空间中的像素的饱和度:该值等于1加上预定固定分数与第一因子乘以第二因子的乘积的乘积。然后,处理器可以通过将hsv颜色空间中的像素的分配的饱和度乘以如下的值来调整hsv颜色空间中的像素的饱和度:该值等于1加上预定固定分数与第一因子乘以第二因子的乘积的乘积。所述预定固定分数可以设置为0.5。概率分布可以是高斯分布。所述概率分布能够以包括饱和度数的预定义范围的大约25%-40%的数为中心。所述概率分布还能够以包括亮度数的预定范围的大约50%的数为中心。
7、朝向较低饱和度值偏移的高斯函数被设计成在不会过度放大已经饱和的像素的情况下增强去饱和像素。第二高斯函数用于hsl颜色空间中的亮度,以便减少近白色和近黑色像素的饱和度增强。这些因子用于使用以下公式来增强饱和度:增强饱和度值=(原始饱和度值)x(1 +(因子1 x因子2 x 0.5))。
8、为了减少从内窥镜轴向外发射的电磁辐射,承载在内窥镜的远端处的摄像头传感器和内窥镜手柄中的主pcb之间的信号迹线的刚性或挠性扩展电路板优选被构造为条状线,而不是更常规构造的微带(microstrip)。条状线构造包括嵌入在刚性或挠性扩展电路板内的传输线(包括信号迹线)下方和上方的接地平面。这为整个电路板产生了一致的接地平面,从而抑制高频电磁辐射从电路板的顶部侧传播。
9、可以实施光学耦合布置,以增强内窥镜(并且扩展地说,患者)与内窥镜外部的图像处理单元中的数字电子部件和底板接地的电气隔离。在示例布置中,usb 3.0电源和信号接口用于在内窥镜的pcb和图像处理单元中的电子控件之间提供电气连接和电子连接。信号接口被配置成在最高约5ghz的频率下操作。因此,内窥镜线缆和图像处理单元之间的连接的光学耦合可以提供适当形式的隔离。例如,可以使用usb 3.0光纤扩展器来提供usb3.0信号隔离。本地和远程扩展器之间的数字通信接口可以通过0.5m光纤线缆进行光耦合。
10、在另一方面,内窥镜组件可以包括内窥镜和套管针。所述轴可以包括单个导管,该单个导管被构造成用于在所述轴的近侧部处的轴端口和所述轴的远侧部的冲洗端口之间运送冲洗流体。所述轴可以被构造成插入到套管针中,该套管针具有远侧开口,以允许所述轴的远端突出穿过该开口。套管针的近侧部可以连接到套管针流体端口,并且套管针的远侧部可以包括一个或多个侧端口,从而允许流体进入或离开由套管针的内壁和内窥镜的所述轴的外壁限定的套管针空间。因此,内窥镜组件可以被构造成使用用于冲洗的套管针空间和用于抽吸的轴导管,或者使用用于抽吸的套管针空间和用于冲洗的轴导管来同时进行冲洗和抽吸。
- 还没有人留言评论。精彩留言会获得点赞!