超声刺激腓神经的闭环血流动力学调节成像系统及方法
本发明属于超声刺激调控,具体涉及一种超声刺激腓神经的闭环血流动力学调节成像系统及方法。
背景技术:
1、超声波在医学领域应用最广泛的一种技术手段,超声成像在临床上已经使用了几十年,彩色多普勒血流成像,以脉冲多普勒技术为基础得到彩色血流与二维灰阶图像的叠加。彩色多普勒成像技术相较于传统b型超声成像能够更加直观地显示血流的流动方向、流动速度、流动范围、血流性质以及有无返流、分流等,现阶段,彩色多普勒成像已成为超声诊断不可缺少的技术。除此之外,近年来神经调控技术快速发展,如电刺激技术、磁刺激技术和超声刺激技术等诸多技术手段应用于康复治疗领域,其中电刺激主要针对焦虑、抑郁及儿童相关疾病,磁刺激主要针对中枢神经损伤类疾病,但这两种方法在深入组织产生紧密刺激焦点的能力方面存在一定的限制并且仅限于在相对大的面积上进行诱导;而聚焦超声刺激作为一种非入侵性的检查方式使刺激区域神经元产生兴奋或抑制效应,能够利用空间聚焦能力进行精确刺激,进而进行神经调控,并且聚焦的焦点大小由声波波长和超声换能器决定,理论上可以实现毫米级的聚焦刺激。因此,低强度聚焦超声神经调控技术在疾病治疗中具有非常广阔的前景。
2、现有的神经刺激系统主要分为电刺激系统和超声刺激系统,其中电刺激依然是神经刺激调节方法中的主要手段,使用高频电刺激不同神经实现治疗目的。如在中国专利文献cn115087482a公开的一种电刺激腓神经系统,通过向腓神经或其分支施加高频脉冲电刺激治疗信号来使用高频刺激治疗患有不安腿综合征或周期性肢体运动障碍的症状的患者,以基于紧张性运动激活阈值、分心阈值或疼痛阈值来表征神经刺激反应;又如中国专利文献cn118286598a公开的一种用于神经刺激系统,以遥控模块控制植入生物体内的电极,持续监控实验对象生物电信号判断是否具有发病风险。又如中国专利文献cn118253035a公开的一种可编程有源神经刺激装置,以编程控制任意数目刺激单元作用于听觉神经、视觉神经等目标神经,可调节电刺激的电压幅度、维持时间、脉冲宽度等参数。又如中国专利文献cn118161748a公开的一种用于抗疲劳的神经电刺激装置与方法,该装置电刺激模块分为迷走神经刺激单元和三叉神经刺激单元,根据采集实验对象心电信号调整电刺激参数,使用者可根据需求选择对神经尽兴点刺激的方式。又如中国专利文献cn118105625a公开的一种基于无创耳迷走神经刺激的脑积水治疗系统,系统实现自由调节电刺激疏波和密波大小对耳迷走神经进行刺激治疗的同时对刺激电流进行监测。
3、以上专利均公开了相关的电刺激神经调节系统,通过采集受电刺激的生理电信号变化调节电刺激参数,但电刺激治疗方式在深入组织进行精准刺激时效果并不理想。
4、如中国专利文献cn118079257a公开的一种变频超声调控装置,该装置基于电生理信号与超声强度函数拟合模型,实现依据患者电生理信号幅值调整超声刺激参数改变刺激强度。又如中国专利文献cn117771544a公开的一种电刺激联合超声刺激的脑神经刺激检测装置,该装置依据实验对象荧光信号调整电刺激信号和超声刺激信号的强度,实现了一体化检测神经元变化与调控神经元活动的目的。又如中国专利文献cn116849680a公开的一种闭环式超声-光联合视觉刺激系统及方法,该系统依据实验对象神经组织生理电信号对超声刺激频率和光波刺激频率进行调整,实现一体化光刺激和超声刺激对视觉神经的闭环刺激系统搭建。又如中国专利文献cn116603180a公开的一种全声学脑刺激-脑成像系统,该系统利用超声成像系统监测经超声刺激后的脑部目标靶区血流速度,基于血流速度利用pid算法实现对超声刺激的参数进行自动调整,完成全声学刺激-成像闭环系统的搭建。又如中国专利文献cn116570237a公开的一种经颅磁声刺激下的神经活动检测系统,该系统刺激装置分为超声刺激装置和磁场产生装置两种,系统采集待测对象的近红外检测数据得到预设的神经参数的参数值,所述神经参数为反映待测对象在所述超声刺激和所述磁场刺激下的神经活动的参数。又如中国专利文献cn116265040a公开的一种可穿戴式超声刺激兼容电生理记录系统,该系统提供了可实时调整超声参数的超声刺激模块和电生理记录模块用于采集、记录、分析电生理信号,实现超声刺激与电生理调控效应的实时、匹配性对比。又如中国专利文献cn115918565a公开的一种超声刺激双重闭环康复系统,系统分析实验对象运动姿势调节数据和超声刺激脑肌电数据并以此调整系统训练运动姿势、运动速度以及超声刺激参数。又如中国专利文献cn115344122a公开的一种声波无创脑机接口及控制方法,以超声脑血流成像模块实时获取目标对象的脑血流成像信息以此确定控制信号,并将控制信号发送至执行设备,执行设备包括动作设备或超声刺激设备。又如中国专利文献cn114947838a公开的一种颅内多点位血氧监测与闭环超声刺激装置,系统旨在通过超声刺激提升颅内血氧值,利用光纤设备获取颅内多点位血氧值并以此控制刺激超声换能器的开启与关闭。又如中国专利文献cn114225243a公开的一种用于血糖调节的神经调控系统,该系统以颈部血管与迷走神经的伴行关系为研究机理,利用超声成像模块获取颈部血管的实时显影信号以及血糖监测模块获取实时血糖浓度信号并以此定位迷走神经,进而调节超声刺激模块的焦点位置和超声刺激的参数。
5、以上专利均公开了相关的超声刺激闭环系统,在调节目的上不尽相同且系统的反馈信号之间也各有差异,但均属于神经调控技术领域,对于超声刺激的调节作用还需要进一步深入研究。
6、在血流动力学调节方面,超声刺激腓神经具有潜在的应用价值,如改善下肢血液循环、治疗血管疾病等。然而,现有的超声刺激系统在实现腓神经刺激的同时,缺乏对腘动脉和腘静脉的血流动力学的实时观测及调节。这限制了超声刺激在血流动力学调节领域的应用和发展。
7、因此现在需要一种能够同时实现超声刺激腓神经、腘动脉和腘静脉实时观测及调节的超声刺激腓神经的闭环血流动力学调节成像系统及方法。
技术实现思路
1、本发明的目的是提供一种超声刺激腓神经的闭环血流动力学调节成像系统及方法,能够同时进行超声刺激腓神经、腘动脉和腘静脉的血流动力学实时观测,能够利用模糊逻辑控制算法实现血流动力学的自动调节,改善血液循环,为超声刺激腓神经提供实时便捷的调节效应检测。
2、为实现上述目的,本发明所采用的技术方案是:
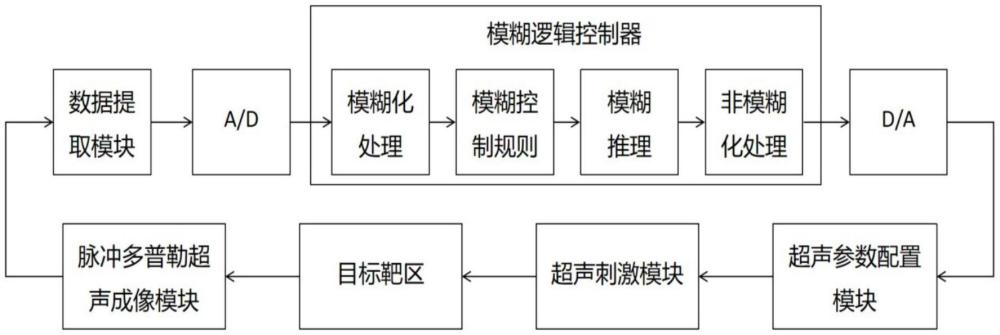
3、一种超声刺激腓神经的闭环血流动力学调节成像系统,包括脉冲多普勒超声成像模块、超声刺激参数配置模块、电源模块、超声刺激模块、反馈控制模块以及上位机显示模块,其中,
4、脉冲多普勒超声成像模块配置为对腘动脉和腘静脉进行彩色脉冲多普勒成像,获取二者的血流动力学信息,并将其传递给上位机显示模块;腘动脉和腘静脉的血流动力学信息包括腘静脉血流峰值速度、腘静脉每搏量、腘静脉单位时间流量、腘动脉血流峰值速度、腘动脉每搏量、腘动脉单位时间流量以及腘动脉阻力指数的变化曲线信息;
5、超声刺激参数配置模块配置为接收反馈控制模块传送的实时超声刺激参数并按其进行配置的同时通过电信号传递至超声刺激模块;超声刺激参数包括超声刺激持续时间、超声刺激声强和超声刺激频率;
6、电源模块配置为用电模块的电压供应;
7、超声刺激模块包括靶向实验对象腿部腓神经并释放聚焦超声刺激的换能器;
8、反馈控制模块包括数据提取模块和模糊逻辑控制器,数据提取模块自脉冲多普勒超声成像模块中提取血流动力学信息并传输至模糊逻辑控制器,模糊逻辑控制器进行模糊推理得到实时超声刺激参数并传送至超声刺激参数配置模块;
9、上位机显示模块配置为利用广义特征值和矩阵降秩原理的矩阵束算法计算血流动力学信息,显示腘动脉和腘静脉的彩色多普勒图像及其血流动力学变化,并进行图像动态回放及图像处理操作。
10、本发明技术方案的进一步改进在于:脉冲多普勒超声成像模块包括超声发射模块、回波接收处理模块、fpga主控模块以及超声成像换能器,其中,
11、超声发射模块配置为产生高压脉冲信号激励超声成像换能器产生超声波脉冲信号,其包括高压脉冲电路和收发隔离电路;
12、回波接受处理模块配置为对回波信号实现前置放大、增益补偿以及模数转换,将转换后的数字信号传输至fpga主控模块;
13、fpga主控模块配置为对回波数据的接收与存储、动态数字滤波、包络检波、对数放大、数据二次采样及与上位机显示模块通信;
14、超声成像换能器配置为将高压脉冲信号转变成超声信号,再将超声回波信号转换成电信号传输至回波接受处理模块。
15、本发明技术方案的进一步改进在于:脉冲多普勒超声成像模块的工作流程包括以下步骤:
16、超声发射模块中高压脉冲电路根据超声聚焦发射精确延时的高压脉冲信号;
17、高压脉冲信号经收发隔离电路传送至超声成像换能器,超声成像换能器将高压脉冲信号转变成超声信号对待检测目标靶区进行扫描;
18、超声成像换能器将待测目标靶区反射回波信号转成电信号,传输至回波接收处理模块;
19、回波接收处理模块对超声回波信号进行低噪声放大、可变增益放大、抗混叠滤波以及高速模数转换操作,并将经模数转换后的数字信号传送至fpga主控模块;
20、fpga主控模块接收并存储数字信号,对其进行处理后传递给上位机显示模块。
21、本发明技术方案的进一步改进在于:反馈控制模块中的模糊逻辑控制器包括模糊化处理、模糊控制规则、模糊推理和非模糊化处理,其中,
22、模糊化处理采用选定腘静脉血流峰值速度误差、腘动脉血流峰值速度误差、腘动脉阻力指数误差以及三者的误差变化率作为模糊逻辑控制器的6个输入量,并将其转换为可识别的模糊量;
23、模糊控制规则包括数据库与规则库;数据库提供处理模糊数据的相关定义,将每一个输入量划分为7个模糊集,分别是负大nb、负中nm、负小ns、近零zo、正小ps、正中pm和正大pb,输入量腘静脉血流峰值速度误差、腘动脉血流峰值速度误差、腘动脉阻力指数误差以及三者的误差变化率的论域均设置为{-3,-2,-1,0,1,2,3};规则库提供语言控制规则描述控制目标和策略;
24、模糊推理在模糊控制规则和模糊量的基础上做出推理决策,得出最终输出超声刺激参数的模糊输出控制量;
25、非模糊化处理将模糊推理得到的模糊输出控制量转换为超声刺激参数控制输出,使得超声刺激时间、超声刺激声强和超声刺激频率比作为模糊逻辑控制器的3个输出量,供超声刺激参数配置模块调用,其中输出量超声刺激时间、超声刺激声强和超声刺激频率的论域设置为{-4.5,-3,-1.5,0,1.5,3,4.5}。
26、本发明技术方案的进一步改进在于:模糊逻辑控制器的设计流程包括以下步骤:
27、确定单变量二维模糊控制器结构;
28、定义输入、输出模糊集,对腘动脉峰值血流速度误差evd及其误差变化率δvd和控制量刺激时间tn的模糊集及其论域做如下定义:
29、evd、δvd和tn的模糊集均为:{nb,nm,ns,zo,ps,pm,pb}
30、evd和δvd的论域均为:{-3,-2,-1,0,1,2,3}
31、tn的论域为:{-4.5,-3,-1.5,0,1.5,3,4.5}
32、其余模糊逻辑控制器的输入、输出模糊集及其论域均与上述定义相同;
33、定义输入、输出隶属函数,对模糊语言变量确定隶属函数,确定论域内元素对模糊语言变量的隶属度;
34、设计模糊控制规则,模糊控制规则语句构成了描述众多控制过程的模糊模型;
35、建立误差与误差率的7*7模糊控制表,包括以腘动脉峰值血流速度误差evd及其误差变化率δvd所描述的49条模糊规则,各个模糊语句之间是或的关系,由第一条语句所确定的控制规则计算出控制量t1,然后由其余语句分别求出控制量t2,…,t49,则控制量为模糊集合t,其表示为:t=t1+t2+λ+t49;
36、利用模糊推理算法和模糊规则进行推理得到最终控制量;
37、利用重心法取隶属度函数曲线与横坐标围成的重心,进行非模糊化处理得到最终输出值。
38、本发明技术方案的进一步改进在于:利用模糊逻辑控制器对超声刺激参数进行自动调节,包括以下步骤:
39、反馈控制模块中的数据提取模块自脉冲多普勒超声成像模块中提取血流动力学信息,包括实验对象腿部腘静脉血流峰值速度、腘动脉血流峰值速度和腘动脉阻力指数,分别记作vpn、vdn和rn;
40、超声刺激模块针对实验对象的腓神经释放超声刺激时间为tn、超声刺激声强为qn、超声刺激频率为fn的超声聚焦刺激;
41、脉冲多普勒超声成像模块对实验对象的腘动脉和腘静脉进行彩色多普勒成像和血流动力学信息提取;
42、反馈控制模块中的数据提取模块自脉冲多普勒超声成像模块中提取经超声刺激后实验对象腿部腘静脉血流峰值速度、腘动脉血流峰值速度和腘动脉阻力指数,分别记作vpn+1、vdn+1和rn+1,计算三个信息误差及误差变化率,记作evp、evd、er和δvp、δvd、δr;
43、将6个变量evp、evd、er和δvp、δvd、δr作为控制变量输入至模糊逻辑控制器,进行模糊化处理;
44、基于输入量在模糊控制规则中寻找相应模糊逻辑控制规则,并在输入量和输出量确定的基础上进行模糊推理,对模糊推理得出的结果进行非模糊化处理,得到模糊逻辑控制器的输出量超声刺激时间为tn+1、超声刺激声强为qn+1、超声刺激频率为fn+1;
45、将参数值tn+1、qn+1、fn+1传送至超声刺激参数配置模块,进行下一轮超声刺激。
46、本发明技术方案的进一步改进在于:上位机显示模块利用广义特征值和矩阵降秩原理的矩阵束算法,基于自适应秩选择方法直接估算腘动静脉血流峰值速度,获取血流动力学信息,包括以下步骤:
47、通过空间矩阵束算法将多普勒信号看作一系列复指数信号叠加而成的信号模型,如下式所示:
48、
49、式中s表示多普勒信号,k表示信号模型的主成分阶数,am表示复振幅,fdm表示第m阶主成分频率,tpri表示脉冲重复频率,ω表示白噪声,n表示多普勒信号的采样大小;
50、通过矩阵束算法将多普勒信号划分为相互重叠的片段,并依次作为矩阵的行,形成hankel矩阵,对于大小为n的多普勒信号,hankel矩阵矩阵表示如下:
51、
52、式中,l表示维数参数,满足l≤ceil(n/2),ceil(n/2)为大于或等于n/2的最小整数,l在n/3和n/2之间;
53、计算hankel矩阵h的降秩矩阵,并进行奇异值分解,如下式所示:
54、
55、其中表示增广矩阵,δ表示噪声分量,σ、u、v分别表示奇异值、左奇异向量和右奇异向量;
56、分别删除矩阵h的第一行和最后一行,构造一组矩阵对x1和x0,并将其分解成以下形式:
57、x1=zlbzzrt和x0=zlbzrt
58、其中,zl=[z1 z2 ... zk],zm=[zm0 zm1 ... zm(n-l-1)]t,zm=exp(j2πfdmtpri),m=1,λ,k,b=diag(a1,a2,λ,ak),z=diag(z1,z2,λ,zk),zr与zl结构相似,t表示矩阵转置;
59、基于上述矩阵分解形式,将矩阵束x1-λx0进行表示为:
60、x1-λx0=zlb[z-λi]zrt
61、如若λ等于z中主对角线元素,则矩阵x1-λx0的秩下降1,{zm}是矩阵x1-λx0广义特征值λm;
62、第m阶主多普勒频率从第m个广义特征值中得到,如下式所示:
63、
64、矩阵束的广义特征值与矩阵x0+x1的特征值相同,上标+表示伪逆矩阵,可通过矩阵的奇异值分解计算。
65、本发明技术方案的进一步改进在于:超声刺激时间设置为0-10min,超声刺激声强设置为0-3w/cm2,超声刺激频率设置为20-100khz。
66、本发明技术方案的进一步改进在于:超声刺激模块的换能器采用单阵元透镜聚焦超声换能器。
67、一种超声刺激腓神经的闭环血流动力学调节成像方法,使用闭环血流动力学调节系统进行血流动力学的自动调节,包括以下步骤:
68、步骤s1:电源模块进行供电;
69、步骤s2:脉冲多普勒超声成像模块对实验对象的腘动脉和腘静脉进行彩色脉冲多普勒成像,获取腘动脉和腘静脉的血流动力学信息,并将其传递给上位机显示模块;
70、步骤s3:超声刺激参数配置模块初始化设置,并传递至超声刺激模块;
71、步骤s4:超声刺激模块对实验对象腿部腓神经释放聚焦超声刺激;
72、步骤s5:脉冲多普勒超声成像模块对经超声刺激后的腘动脉和腘静脉进行彩色脉冲多普勒成像,获取腘动脉和腘静脉血流动力学信息,并将其传递给上位机显示模块;
73、步骤s6:反馈控制模块通过其数据提取模块自步骤s5中的脉冲多普勒超声成像模块内提取血流动力学信息并传输至模糊逻辑控制器进行模糊推理,得到实时超声刺激参数,并传递至超声刺激参数配置模块;
74、步骤s7:超声刺激参数配置模块接收步骤s6中的反馈控制模块传送的实时超声刺激参数并按其进行配置,同时传递至超声刺激模块,然后重复步骤s4-s6。
75、由于采用了上述技术方案,本发明取得的技术进步是:
76、本发明超声刺激腓神经的闭环血流动力学调节成像系统及方法,能够同时进行超声刺激腓神经、腘动脉和腘静脉的血流动力学实时观测,能够利用模糊逻辑控制算法实现血流动力学的自动调节,改善腿部血液循环,为超声刺激腓神经提供实时便捷的调节效应检测。
77、本发明采用的超声刺激模块对实验对象腓神经释放超声刺激,脉冲多普勒超声成像模块同步观测腘动脉、腘静脉的血流动力学变化,反馈控制模块中的模糊逻辑控制器根据成像模块采集血流动力学数据信息推理得到超声刺激参数,超声刺激参数配置模块对超声刺激模块产生的超声进行参数调整,本发明能够实现超声刺激腓神经对腿部血流动力学的闭环调节,改善腿部血液循环,通过超声刺激代替传统电刺激实现对超声刺激效果的实时监测。
78、本发明采用的超声刺激模块选用单阵元透镜聚焦超声换能器,超声参数配置模块接收来自反馈控制模块的超声参数信息并将其传送至超声刺激模块,超声刺激模块依据上述参数配置并通过超声刺激换能器发出超声波,超声换能器单阵元透镜使声波聚焦于目标靶区,石英材料的透镜压电特性与谐振频率的稳定性均十分优良,高压激励下的超声刺激换能器产生高强度超声频率,聚于实验对象目标靶区并对其进行刺激。本发明利用单阵元透镜聚焦超声换能器伴随超声波的机械效应对腓神经进行刺激,能够精准刺激目标靶区且不对周围组织造成损伤。
79、本发明中上位机显示模块利用广义特征值和矩阵降秩原理的矩阵束算法实现超声彩色血流成像,不需要对回波信号进行壁滤波处理,能够从多普勒信号中直接计算出血流的运动速度。通过构造扩展的kankel矩阵,空间矩阵束算法能够更好地划分信号成分和背景噪声,从而提供更加准确的速度估计,基本消除由噪声引入的混叠现象,提升血流速度分辨率。
80、本发明中反馈控制模块采用模糊逻辑控制器计算超声参数,模糊控制通过使用模糊逻辑控制规则语言化的规则进行逻辑推理,在其推理过程中不需要控制过程的精确数学模型,且具有较强的容错能力,系统操作者易于通过人的自然语言进行人机交互,通过更改模糊条件语句调整整个模糊逻辑控制器的推理规则,适应环境特征变化和实验对象体质变化。
- 还没有人留言评论。精彩留言会获得点赞!