助行架系统及力学数据分析方法
本技术涉及医疗康复辅助设备,特别是涉及助行架系统及力学数据分析方法。
背景技术:
1、如今在医疗领域,康复运动训练是帮助四肢功能性受损患者恢复的有效手段,但康复训练过程中对于力学数据的监测却十分匮乏。力学数据一方面能帮助研究人员进一步分析患者当前的恢复情况,针对性地制定患者的训练计划,帮助患者更快地恢复。另一方面,对于感觉功能缺失的患者,需要力学数据进行人体动力学分析的支撑来预防过载情况的发生,保证患者康复时的安全。
2、目前市面上存在的助行器可以帮助患者在康复训练时,利用上肢力量提高行走能力,提高康复的效率。但是现有助行器并无力学数据采集和反馈的功能,市场方面存在空缺。
3、其中一种助行器系统将助行器和足底压力感受装置组合成测力助行装置,来获取康复过程中的负重和力学数据。但该设备设计时主要应用场景为骨折患者的负重检测,对于下肢存在伤病的人存在穿脱困难,以及精度不高等问题。另一种助行器系统中在助行器的肘托处添加了力传感器,但使用肘托助行器的人相对较少,且该种力传感器添加的位置是设备结构的分离点,能直接对设备进行拆解并添加,但是在添加力学力传感器时需要考虑力学分布对采集准确性的影响,容易导致采集数据失真。
技术实现思路
1、基于此,有必要针对现有的助行器系统在使用时穿脱困难以及精度不高、数据失真的问题,提供一种助行架系统及力学数据分析方法。
2、一种助行架系统,所述助行架系统包括:架体、四个力传感器、四个第二支撑腿以及四个转接组件,
3、所述架体包括两个平行间隔设置的扶杆、四个第一支撑腿以及两组连接杆,所述扶杆的延伸方向沿所述助行架系统的前进方向,所述扶杆的两端分别连接一个所述第一支撑腿,所述第一支撑腿远离所述扶杆的一端朝向地面,其中一组所述连接杆的两端分别与两个所述扶杆连接,另一组所述连接杆的两端分别与两个第一支撑腿连接;
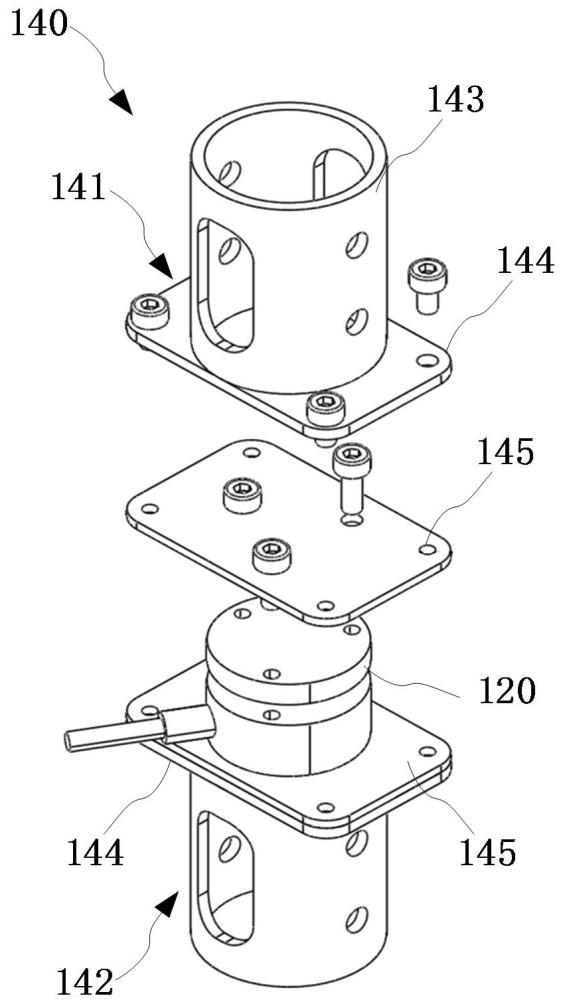
4、四个所述力传感器、四个所述第二支撑腿、四个转接组件以及四个所述第一支撑腿一一对应;所述转接组件包括第一转接架和第二转接架,所述第一转接架和所述第二转接架均包括转接筒和第一转接板,所述转接筒的一端与所述第一转接板的一侧连接,所述第一转接架的所述转接筒套设于所述第一支撑腿背离所述扶杆的一端,所述第一转接架的所述第一转接板与所述力传感器的一端连接,所述第二转接架的所述转接筒套设于所述第二支撑腿靠近所述第一支撑腿的一端,所述第二转接架的所述第一转接板与所述力传感器背离所述第一转接架的一端连接。
5、操作者在使用上述的助行架系统行走过程中,由于每个扶杆的两端分别被一个第一支撑腿支撑,连接杆将两个扶杆及两组第一支撑腿连接在一起,因此形成了四腿结构的架体,从而使得操作者在抓持扶杆行走的过程中更为稳定。第一转接架的转接筒套设于第一支撑腿背离扶杆的一端,第一转接架的第一转接板与力传感器的一端连接,第二转接架的转接筒套设于第二支撑腿靠近第一支撑腿的一端,第二转接架的第一转接板与力传感器背离第一转接架的一端连接。从而依次将第一支撑腿、第一转接架、力传感器、第二转接架以及第二支撑腿连接,实现了将来自扶杆的力通过第一转接架的第一转接板传递至力传感器,使得第二支撑腿所受的来自地面的反作用力同样通过第二转接架的第一转接板传递至力传感器,第一转接板与力传感器、第二转接板与力传感器均为面接触,从而力传感器能够稳定接收到作用力以及反作用力,从而提高力传感器的准确性。四个第一支撑腿上的四个力传感器能够多位点探测助行架系统的力学数据,从而进一步提高助行架系统的力学数据的检测稳定性和准确性,同时方便后续数据分析。将力传感器放置在结构的静定处,能避免力传导的非静定情况,从而精准地测量出前后和左右两侧的力分布情况。
6、在一实施例中,所述转接组件还包括两个第二转接板,其中一个所述第二转接板的一侧与所述第一转接架的所述第一转接板连接,另一端与所述力传感器连接,另一个所述第二转接板的一侧与所述第二转接架的所述第一转接板连接,另一端与所述力传感器背离所述第一转接架的一端连接。
7、在一实施例中,所述转接组件还包括第一紧固件和第二紧固件,所述第一支撑腿的侧壁开设有第一连接孔,所述第一转接架的所述转接筒开设有第二连接孔,所述第一紧固件穿设于所述第一连接孔与所述第二连接孔;
8、所述第一支撑腿的侧壁开设有第三连接孔,所述第二转接架的所述转接筒开设有第四连接孔,所述第二紧固件穿设于所述第三连接孔与所述第四连接孔。
9、在一实施例中,所述第二转接板与所述力传感器螺栓连接。
10、在一实施例中,所述第一转接板与所述第二转接板螺栓连接。
11、在一实施例中,所述的助行架系统还包括信号采集器、变送器以及显示器;
12、所述显示器与其中一个所述连接杆连接;
13、所述信号采集器与所述力传感器连接,用以采集所述力传感器检测的力;
14、所述变送器同时与所述信号采集器、所述显示器连接,用以将所述信号采集器采集的数据传输至所述显示器显示。
15、在一实施例中,所述的助行架系统还包括上位机,所述上位机与所述显示器或所述变送器信号连接,用以远程监测所述力传感器检测的力。
16、在一实施例中,所述力传感器在竖直方向量程为100kg,所述力传感器的采样率为50-100hz;
17、所述显示器的采样数据位宽为8位,所述显示器显示到小数点后1位。
18、本技术还提供一种助行架系统的力学数据分析方法,用以分析所述的助行架系统的力传感器检测的力,所述助行架系统的力学数据分析方法包括以下步骤:
19、采集操作者在使用所述助行架系统过程中四个力传感器检测的力;
20、将四个所述力传感器检测的力分解为沿第一方向、第二方向以及第三方向的分力,其中所述第一方向为所述前进方向,所述第三方向为竖直方向,所述第一方向、所述第二方向以及所述第三方向两两垂直;
21、根据分解后的所述第一方向、所述第二方向以及所述第三方向的力以及操作者的体重计算地面对所述助行架系统的反作用力和地面对操作者的反作用力;
22、所述地面对所述助行架系统沿所述第一方向的反作用力为:;
23、所述地面对所述助行架系统沿所述第二方向的反作用力为:;
24、所述地面对所述助行架系统沿所述第三方向的反作用力为:;
25、所述地面对操作者沿所述第一方向的反作用力为:;
26、所述地面对操作者沿所述第二方向的反作用力为:;
27、所述地面对操作者沿所述第三方向的反作用力为:;
28、其中,为第i个力传感器检测的力沿所述第一方向的分力,为第i个力传感器检测的力沿所述第二方向的分力,为第i个力传感器检测的力沿所述第三方向的分力,为操作者的体重,g为重力加速度;
29、利用以下公式对所述地面对操作者沿所述第三方向的反作用力进行修正:,
30、其中为修正因子:,
31、
32、为与步态周期相关的分段函数,其中左脚开始发力到下一次左脚开始发力为一个步态周期,幅值为,其中为每个步态周期百分比处误差值与拟合函数的最大差值的绝对值;当时得到的步态周期百分比依次为第一阶段的t1、t2和第三个阶段的t5、t6,当时得到的步态周期百分比依次为第一阶段的t3、t4和第三个阶段的t7、t8,每个分段正弦信号的周期,则等于该正弦函数的终点减起点,即,,,。
33、经过修正后的最终的力与基准力板采集的数据对比的曲线如图5所示,误差由5.96%降低至1.56%。
34、在一实施例中,根据四个所述力传感器检测的力以及每个所述力传感器的相对操作者步态周期开始时的质心位置计算操作者的实时质心的位置:
35、操作者沿所述第二方向的实时质心的位置:,
36、操作者沿所述第一方向的实时质心的位置:,
37、为第i个力传感器检测的力,四个所述力传感器在水平面围成矩形,以所述矩形的中心点为原点,为第i个力传感器相对所述原点沿第一方向的距离,为第i个力传感器相对所述原点沿第二方向的距离。
38、与仅限于脚部的压力鞋垫相比,本技术能提供全身多点的压力分布评估,为康复训练提供更为全面的数据支持。在得到了四个力传感器压力的基础上,可以根据四个力传感器的压力计算患者手部发力时的重心分布,从而得出患者行走时重心情况。能单独获得每个力传感器检测的力,后期处理过程中可以根据需求计算不同的指标。通过助行架采集到的数据计算出来的压力中心有很好的可用性,能精准地判断出当前患者质心位置。
39、还可以根据需求计算步态周期内的cop时空分布等,也是通过加权平均计算压力重心分布,判断患者行走过程中重心趋势,进而通过多体动力学模型,进行患者全身的力学分析,通过计算的力学数据优化康复训练的安排。
40、通过数据的分析还能实现对患者的异常状态监测和跌倒保护,能监测患者的异常发力状态和跌倒等情况,实时发现异常情况后能及时暂停患者当前的任务,从而保护患者避免受伤,即监测到异常支撑数据。
41、本产品的集成式设计使得患者无需穿戴额外设备即可完成测量,大大增加了患者的舒适度和便捷性,同时简化了数据获取的方式。研究人员可以根据需求,安装不同的力学甚至其他力传感器,从而获得更加有针对性的数据。通过详细的压力分布记录和评估结果,可以使患者在康复过程中,看到自己的力学参数从而自行调整,也帮助了医生和康复师可以更好地制定或调整康复方案。
- 还没有人留言评论。精彩留言会获得点赞!